Die Wissenschaft der Elektrizität entwickelte sich im XIX. und XX. Jahrhundert rasant, was zur Entwicklung von elektrischen Asynchronmotoren führte. Mit diesen Geräten hat die Entwicklung der Industrie einen riesigen Sprung nach vorne gemacht, und es ist heute unmöglich, sich Fabriken und Anlagen ohne die Hilfe von Asynchronmaschinen vorzustellen.
Inhalt
Geschichte
Die Geschichte des Asynchronmotors geht auf das Jahr 1888 zurück, als Nikola Tesla einen Schaltkreis für einen Elektromotor patentieren, im selben Jahr ein anderer Elektrowissenschaftler Gallileo Ferraris veröffentlichte eine Abhandlung über die theoretischen Aspekte der Asynchronmaschine.
Im Jahr 1889 hat ein russischer Physiker Michail Osipowitsch Doliwo-Dobrowski wurde in Deutschland ein Patent für einen asynchronen Drehstrommotor erteilt.

All diese Erfindungen ermöglichten die Verbesserung elektrischer Maschinen und führten zum massenhaften Einsatz elektrischer Maschinen in der Industrie, die alle Fertigungsprozesse erheblich beschleunigten, die Effizienz verbesserten und die Arbeitsintensität reduzierten.
Der derzeit am häufigsten in der Industrie eingesetzte Elektromotor ist der Prototyp der von Dolivo-Dobrovolsky entwickelten elektrischen Maschine.
Aufbau und Funktionsweise eines Asynchronmotors
Die Hauptkomponenten eines Asynchron-Elektromotors sind der Stator und der Rotor, die durch einen Luftspalt voneinander getrennt sind. Die aktive Arbeit im Motor wird von den Wicklungen und dem Rotorkern verrichtet.
Die Asynchronität des Motors ist definiert als die Differenz zwischen der Rotordrehzahl und der Drehzahl des elektromagnetischen Feldes.
Stator - ist ein fester Bestandteil des Motors, dessen Kern aus Elektrostahl besteht und im Grundrahmen montiert ist. Der Rahmen ist aus einem nicht magnetischen Material gegossen (z. B. Gusseisen, Aluminium usw.).Gusseisen, Aluminium). Bei den Statorwicklungen handelt es sich um ein dreiphasiges System, bei dem die Drähte in Nuten mit einem Umlenkwinkel von 120 Grad verlegt sind. Die Wicklungen werden standardmäßig in Stern- oder Dreieckschaltung an das Netz angeschlossen.

Der Rotor - ist der bewegliche Teil des Motors. Es gibt zwei Arten von Rotoren für Asynchronmotoren: Käfigläufer und Phasenläufer. Diese Typen unterscheiden sich durch den Aufbau der Rotorwicklung.
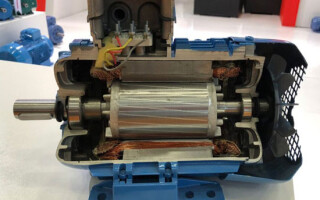
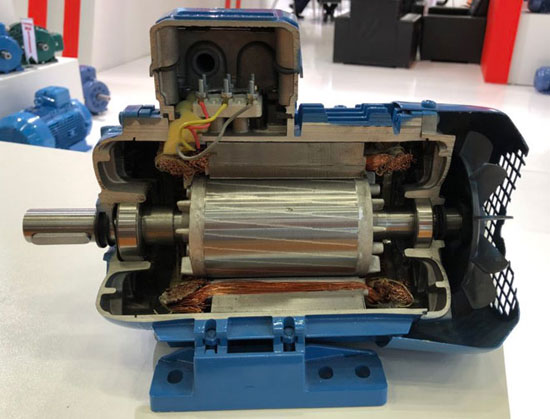
Asynchronmotor mit Käfigläufer
Diese Art von elektrischer Maschine wurde erstmals von M.O. Dolivo-Dobrovolsky und wird im Volksmund als "Eichhörnchen-Rad" wegen seines Aussehens. Die kurzgeschlossene Rotorwicklung besteht aus kurzgeschlossenen Kupferschienen (Aluminium, Messing) und werden in die Wicklungsnuten des Rotorkerns eingesetzt. Dieser Rotortyp hat keine beweglichen Kontakte, so dass diese Motoren sehr zuverlässig und langlebig sind.
Asynchronmotor mit einem Phasenrotor
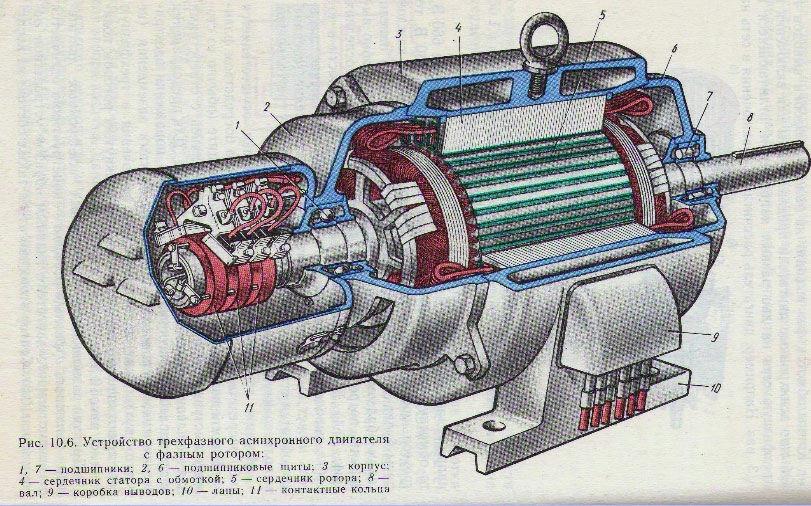
Mit diesem Gerät kann die Geschwindigkeit in einem weiten Bereich variiert werden. Der Drehstromrotor ist eine dreiphasige Wicklung, die in Stern- oder Dreieckschaltung angeschlossen ist. Diese Motoren sind mit speziellen Bürsten ausgestattet, mit denen sich die Drehzahl des Rotors steuern lässt. Wenn der Mechanismus eines solchen Motors mit einem speziellen Rheostat ausgestattet wird, wird der Anlaufwiderstand des Motors verringert und die Einschaltströme, die sich nachteilig auf das Netz und das Gerät selbst auswirken, werden minimiert.
Prinzip der Arbeitsweise
Wenn elektrischer Strom an die Statorwicklungen angelegt wird, wird ein magnetischer Fluss erzeugt. Da die Phasen um 120 Grad zueinander versetzt sind, wird der Fluss in den Wicklungen gedreht. Wenn der Rotor kurzgeschlossen wird, erzeugt diese Drehung einen Strom im Rotor, der ein elektromagnetisches Feld erzeugt. Durch die Wechselwirkung der Magnetfelder von Rotor und Stator wird der Rotor des Elektromotors in Drehung versetzt. Wenn der Rotor phasengesteuert ist, wird an den Stator und den Rotor gleichzeitig eine Spannung angelegt, und in jedem Mechanismus entsteht ein Magnetfeld, das mit dem anderen interagiert und den Rotor in Drehung versetzt.
Vorteile von Asynchronmotoren
| Mit Käfigläufer | Mit phasengewickeltem Rotor |
|---|---|
| 1. Einfache Anlaufvorrichtung und Schaltung | 1. Niedriger Anlaufstrom |
| 2. Niedriger Herstellungspreis | 2. Variable Geschwindigkeit. |
| 3. Die Wellendrehzahl ändert sich nicht mit zunehmender Belastung. | 3. Betrieb mit geringen Überlasten ohne Drehzahlschwankungen. |
| 4. Sie sind in der Lage, kurzzeitigen Überlastungen standzuhalten. | 4. Kann einen automatischen Start anwenden |
| 5. Zuverlässig und langlebig im Betrieb | 5. Hat ein hohes Drehmoment |
| 6. Geeignet für alle Arbeitsbedingungen | |
| 7. Hat einen hohen Wirkungsgrad |
Nachteile von Asynchronmotoren
| Mit Käfigläufer | Mit phasengewickeltem Rotor |
|---|---|
| 1. Die Rotordrehzahl kann nicht kontrolliert werden | 1. überdimensioniert |
| 2. Niedriges Anlaufmoment | 2. Geringere Effizienz |
| 3. Hoher Anlaufstrom | 3. häufige Wartung aufgrund verschlissener Bürsten |
| 4. Eine gewisse Komplexität im Design und bei den beweglichen Kontakten |
Asynchronmotoren sind sehr effiziente Geräte mit guten mechanischen Eigenschaften und daher der am häufigsten verwendete Motortyp.
Betriebsarten

Ein Asynchron-Elektromotor ist ein vielseitiger Mechanismus und hat mehrere Betriebsarten in Bezug auf die Dauer:
- Kontinuierlich;
- Kurzzeit;
- Intermittierend; periodisch;
- Intermittierend;
- Besonderes.
Kontinuierlicher Betrieb - Grundlegende Betriebsart von Asynchrongeräten, die durch den kontinuierlichen Betrieb des Elektromotors ohne Abschaltungen bei konstanter Last gekennzeichnet ist. Diese Betriebsart ist die am weitesten verbreitete und wird in Industrieanlagen auf der ganzen Welt eingesetzt.
Kurzzeitbetrieb - Läuft, bis eine gleichmäßige Belastung für eine bestimmte Zeit erreicht ist (10 bis 90 Minuten), ohne genügend Zeit zum Aufwärmen zu haben. Nach dieser Zeit wird es ausgeschaltet. Dieser Modus wird für die Förderung von Flüssigkeiten (Wasser, Öl, Gas usw.) verwendet.Wasser, Öl, Gas) und andere Situationen.
Intermittierender Betrieb - Die Betriebsdauer ist festgelegt, und nach Beendigung des Arbeitszyklus wird das Gerät abgeschaltet. Betriebsart Start-Betrieb-Stopp. Er kann für eine gewisse Zeit ausgeschaltet werden, bis er sich auf die Außentemperaturen abgekühlt hat, und dann wieder eingeschaltet werden.
Intermittierender Betrieb - Der Motor erwärmt sich nicht auf die maximale Temperatur, kühlt aber auch nicht auf die Umgebungstemperatur ab. Es wird in Aufzügen, Rolltreppen usw. verwendet.
Besonderer Modus - Die Dauer und der Zeitraum der Aktivierung sind frei wählbar.
In der Elektrotechnik gibt es den Grundsatz der Umkehrbarkeit elektrischer Maschinen - das bedeutet, dass das Gerät sowohl elektrische Energie in mechanische Energie umwandeln als auch den umgekehrten Vorgang ausführen kann.
Auch Asynchronmotoren entsprechen diesem Prinzip und haben einen motorischen und einen generatorischen Betrieb.
Betrieb des Motors - ist die grundlegende Funktionsweise eines Asynchron-Elektromotors. Wenn Spannung an die Wicklungen angelegt wird, wird ein elektromagnetisches Drehmoment erzeugt, das den Rotor mit der Welle mitreißt, so dass sich die Welle zu drehen beginnt, der Motor eine konstante Drehzahl erreicht und nützliche Arbeit leistet.
Generator-Modus - basiert auf dem Prinzip, dass der elektrische Strom in den Motorwicklungen durch die Drehung des Rotors erzeugt wird. Wird der Motorrotor mechanisch gedreht, entsteht in den Statorwicklungen eine elektromotorische Kraft, bei einem Kondensator in den Wicklungen wird ein kapazitiver Strom erzeugt. Wenn die Kondensatorkapazität einen bestimmten Wert hat, der von den Eigenschaften des Motors abhängt, kommt es zur Selbsterregung des Generators und zu einem dreiphasigen Spannungssystem. Der Käfigläufermotor arbeitet also wie ein Generator.
Drehzahlregelung für Asynchronmotoren
Es gibt folgende Methoden, um die Drehzahl von Asynchron-Elektromotoren zu regeln und ihre Betriebsarten zu steuern:
- Frequenz - durch Änderung der Frequenz des Stroms im Stromnetz wird die Drehzahl des Elektromotors verändert. Für diese Methode wird ein so genannter Frequenzumrichter verwendet;
- Rheostat - durch Änderung des Widerstands des Rheostats im Rotor ändert sich die Drehgeschwindigkeit. Diese Methode erhöht das Anlaufmoment und den kritischen Schlupf;
- Gepulst - die Steuerungsmethode, bei der eine spezielle Art von Spannung an den Motor angelegt wird.
- Die Wicklungen werden bei laufendem Elektromotor von Stern auf Dreieck umgeschaltet, wodurch die Anlaufströme reduziert werden;
- Regelung mit Polpaarwechsel bei Käfigläufern;
- Anschluss eines induktiven Widerstands für Phasenläufermotoren.
Mit der Entwicklung elektronischer Systeme wird die Steuerung der verschiedenen Asynchronmotoren immer effizienter und präziser. Solche Motoren werden überall auf der Welt eingesetzt, die Vielfalt der Aufgaben, die von solchen Mechanismen erfüllt werden, nimmt von Tag zu Tag zu, und der Bedarf an ihnen nimmt nicht ab.
Ähnliche Artikel: