Science in the field of electricity in the XIX and XX centuries, rapidly evolving, which led to the creation of electrical asynchronous motors. With the help of such devices, the development of the industrial industry has stepped forward and now it is impossible to imagine the plants and factories without the power machines using asynchronous electric motors.
Contents
History
History of asynchronous motor begins in 1888 when Nikola Tesla patented an electric motor circuit, the same year another electrical scientist Gallileo Ferraris published an article on the theoretical aspects of the asynchronous machine.
In 1889, the Russian physicist Mikhail Osipovich Dolivo-Dobrovolsky received a patent in Germany for an asynchronous three-phase electric motor.

All these inventions allowed to improve electric machines and resulted in the mass use of electric machines in industry, which significantly accelerated all technological processes in production, improved the efficiency of work and reduced its labor intensity.
Currently, the most common electric motor used in industry is a prototype of an electric machine created by Dolivo-Dobrovolsky.
Structure and principle of operation of asynchronous motor
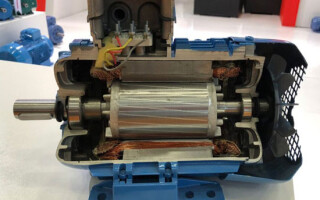
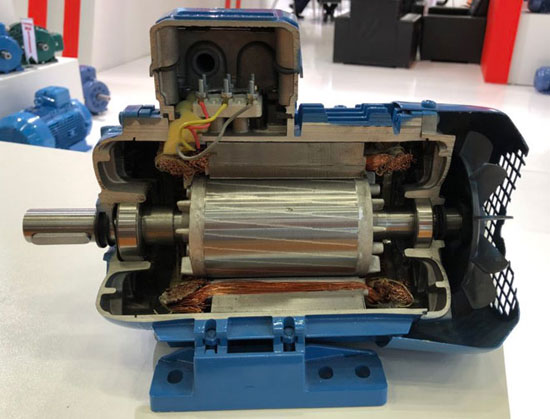
The main components of an asynchronous electric motor are the stator and the rotor, which are separated from each other by an air gap. The active work in the motor is performed by the windings and the rotor core.
Asynchronous motor means the difference between the rotor speed and the electromagnetic field speed.
Stator - is a fixed part of the motor whose core is made of electrical steel and is mounted in the bed. The frame is cast from a material that is not magnetic (cast iron, aluminum). The stator windings are a three-phase system in which the wires are laid in slots with a deflection angle of 120 degrees. Winding phases are connected to the network in star or delta circuits as standard.

The rotor - is the moving part of the motor. Asynchronous electric motor rotors are of two types: squirrel-cage and phase rotors. These types differ from each other by the design of the rotor winding.
Induction motor with squirrel cage rotor
This type of electric machine was first patented by M.O. Dolivo-Dobrovolsky and is popularly called "squirrel wheel" because of the appearance of the design. The short-circuited rotor winding consists of short-circuited rods of copper (aluminum, brass) and inserted in the slots of the rotor core winding. This type of rotor has no moving contacts, so such motors are very reliable and durable in operation.
Asynchronous motor with a phase rotor
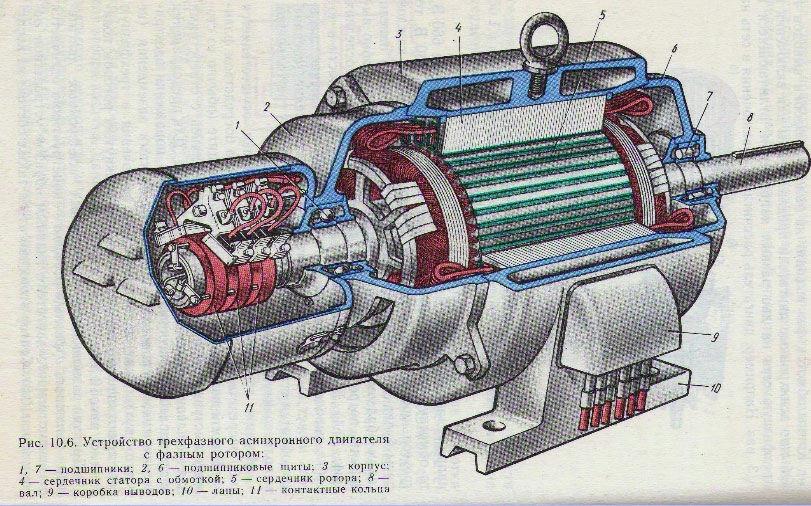
Such a device allows you to adjust the speed of operation in a wide range. Phase rotor is a three-phase winding, which is connected by star or delta circuit. Such motors have special brushes in their design, which can be used to regulate the speed of the rotor. If a special rheostat is added to the mechanism of such a motor, then at the start of the motor active resistance will be reduced and thus the starting currents, which have a deleterious effect on the electrical network and the device itself, will be reduced.
Principle of operation
When electric current is applied to the stator windings, magnetic flux occurs. Since the phases are offset in relation to each other by 120 degrees, this causes the flux in the windings to rotate. If the rotor is short-circuited, this rotation produces a current in the rotor which creates an electromagnetic field. Interacting with each other, the magnetic fields of the rotor and stator cause the rotor of the electric motor to rotate. In the case of a phase-phase rotor, voltage is applied to the stator and rotor simultaneously, a magnetic field appears in each mechanism, they interact with each other and rotate the rotor.
Advantages of asynchronous motors
| Short-circuit rotor | Partial-phase rotor |
|---|---|
| 1. Simple start-up device and circuit | 1. Low starting current |
| 2. Low manufacturing price | 2. Ability to adjust rotation speed |
| 3. Shaft speed does not change with increasing load | 3. Operation with small overloads without changing speed |
| 4. Able to withstand overloads of short duration | 4. Can apply automatic start |
| 5. Reliable and durable in operation | 5. Has a high torque |
| 6. Suitable for any working conditions | |
| 7. Has a high efficiency |
Disadvantages of asynchronous motors
| With squirrel cage rotor | With phase-wound rotor |
|---|---|
| 1. The rotor speed cannot be adjusted | Large size 1. |
| 2. Low starting torque 2. | 2. Efficiency is lower |
| 3. High starting current | Frequent maintenance due to wear of brushes |
| 4. Some design complexity and moving contacts |
Induction motors are very efficient devices with excellent mechanical characteristics, which makes them leaders in frequency of use.
Operating modes

Asynchronous type electric motor is a universal mechanism and has several operating modes in terms of duration:
- Continuous;
- Short-time;
- Intermittent; Periodic;
- Repeatedly-short-time;
- Special.
Continuous mode - is the main mode of operation of asynchronous devices, which is characterized by continuous operation of the electric motor without shutdowns with constant load. This operating mode is the most common, it is used in industrial enterprises everywhere.
Short-time operation - operates until a steady load is reached for a specified time (from 10 to 90 minutes), not having enough time to heat up. After this it is turned off. This mode is used when supplying working substances (water, oil, gas) and other situations.
Periodic operation - The duration of operation has a defined value, and after completing a cycle of work is turned off. Operation mode start-operate-stop. In this case, it can switch off for a period of time before it has time to cool down to external temperatures and then switch on again.
Intermittent operation - Motor does not heat up to the maximum, but does not have time to cool down to ambient temperature either. It is used in elevators, escalators, and other devices.
Special mode - Duration and period of activation arbitrary.
In electrical engineering there is a principle of reversibility of electrical machines - this means that the device can both convert electrical energy into mechanical energy and perform the reverse action.
Asynchronous electric motors also conform to this principle and have the motor and generator modes of operation.
Motor operation - is the basic mode of operation of an asynchronous electric motor. When voltage is applied to the windings, electromagnetic torque is generated, entraining the rotor with the shaft and thus the shaft begins to rotate, the motor goes to a constant speed, performing useful work.
Generator mode - is based on the principle of excitation of electric current in the motor windings as the rotor rotates. If you rotate the rotor of the motor mechanically, an electromotive force is generated in the stator windings, in the presence of a capacitor in the windings there is a capacitive current. If the capacitor capacity is a certain value, depending on the characteristics of the motor, there will be self-excitation of the generator and a three-phase system of voltages will occur. The squirrel cage motor will therefore work like a generator.
Speed control of asynchronous motors
There are the following ways to regulate the rotation speed of asynchronous electric motors and control their operation modes:
- Frequency - by changing the frequency of current in the electrical network, the frequency of rotation of the electric motor changes. For this method, a device called frequency converter is used;
- Rheostat - by changing the resistance of the rheostat in the rotor, the rotational frequency changes. This method increases the starting torque and critical slip;
- Impulse - the control method, in which a special kind of voltage is applied to the motor.
- Switching the windings during the operation of the electric motor from a "star" circuit to a "delta" circuit, which reduces the starting currents;
- Control with change of pole pairs for short-circuited rotors;
- Connection of inductive resistor for phase-rotor motors.
With the development of electronic systems, the control of various asynchronous electric motors is becoming more and more efficient and precise. Such motors are used everywhere in the world, the variety of tasks performed by such mechanisms is growing every day, and the need for them is not decreasing.
Related articles: