Modulation ist ein nichtlinearer elektrischer Prozess, bei dem die Parameter eines Signals (Träger) durch ein anderes Signal (Modulation, Information) verändert werden. In der Nachrichtentechnik sind die Frequenz-, Amplituden- und Phasenmodulation weit verbreitet. In der Leistungselektronik und Mikroprozessortechnik wird die Pulsbreitenmodulation immer häufiger eingesetzt.
Inhalt
Was ist PWM (Pulsweitenmodulation)?
Bei der Pulsweitenmodulation bleiben Amplitude, Frequenz und Phase des ursprünglichen Signals unverändert. Die Dauer (Breite) des Rechteckimpulses wird durch das Informationssignal beeinflusst. In der englischen Fachliteratur wird sie mit der Abkürzung PWM - Pulsweitenmodulation - bezeichnet.
Funktionsprinzip der PWM
Das pulsweitenmodulierte Signal wird auf zwei Arten gebildet:
- analog;
- digital.
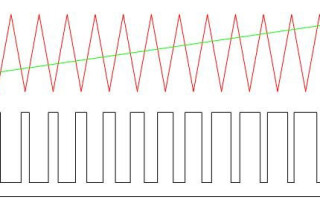
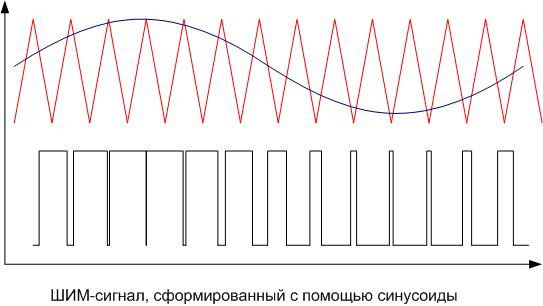
Bei der analogen PWM-Erzeugungsmethode wird ein Trägersignal in Form einer Sägezahn- oder Dreieckswellenform in den invertierenden Eingang des Komparatorsund das Informationssignal wird an den nichtinvertierenden Eingang des Komparators angelegt. Ist der momentane Trägerpegel höher als das Modulationssignal, so ist der Komparatorausgang Null, ist er niedriger, so ist er Eins. Das Ausgangssignal ist ein diskretes Signal mit einer Frequenz, die der Frequenz des Trägerdreiecks oder Sägezahns entspricht, und einer Impulslänge, die proportional zur Höhe der Modulationsspannung ist.
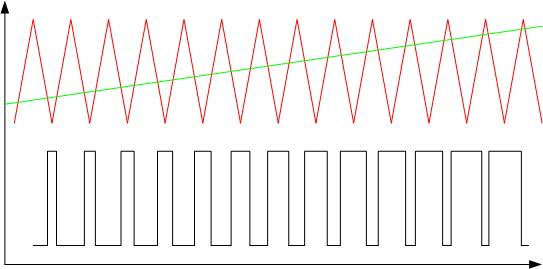
Als Beispiel wird die Pulsweitenmodulation eines Dreieckssignals durch einen linear ansteigenden Impuls gezeigt. Die Dauer der Ausgangsimpulse ist proportional zum Pegel des Ausgangssignals.
Analoge PWM-Controller sind auch als integrierte Schaltungen erhältlich, die einen Komparator und eine Schaltung zur Trägererzeugung enthalten. Es sind Eingänge für den Anschluss von externen Frequenzgebern und das Informationssignal vorhanden. Der Ausgang wird zur Ansteuerung leistungsstarker externer Schalter verwendet. Es gibt auch Rückkopplungseingänge zur Aufrechterhaltung der eingestellten Steuerparameter. Dies ist z. B. beim TL494-Chip der Fall. Für Anwendungen mit relativ geringer Verbraucherleistung stehen PWM-Regler mit internen Schaltern zur Verfügung. Der interne Schalter des LM2596 ist für Ströme bis zu 3 Ampere ausgelegt.
Bei der digitalen Methode werden spezielle Chips oder Mikroprozessoren eingesetzt. Die Impulslänge wird durch ein internes Programm gesteuert. Viele Mikrocontroller, darunter die beliebten PIC und AVR, verfügen über ein integriertes Modul für die Hardware-PWM-Implementierung. Um ein PWM-Signal zu erhalten, muss das Modul aktiviert und seine Betriebsparameter eingestellt werden. Wenn es kein solches Modul gibt, kann die PWM rein softwaremäßig eingerichtet werden, das ist nicht schwierig. Diese Methode bietet mehr Möglichkeiten und mehr Freiheit durch die flexible Nutzung der Ausgänge, erfordert aber mehr Ressourcen des Controllers.
Eigenschaften des PWM-Signals
Die wichtigsten Merkmale des PWM-Signals sind:
- Amplitude (U);
- Frequenz (f);
- Einschaltdauer (S) oder Füllfaktor D.
Die Amplitude in Volt wird in Abhängigkeit von der Last eingestellt. Er muss die Nennspannung für die Versorgung des Verbrauchers sicherstellen.
Die Frequenz des pulsweitenmodulierten Signals wird unter Berücksichtigung der folgenden Überlegungen gewählt:
- Je höher die Frequenz, desto höher die Regelgenauigkeit.
- Die Frequenz darf nicht niedriger sein als die Reaktionszeit des Geräts, das mit PWM gesteuert wird, da es sonst zu einer merklichen Welligkeit des gesteuerten Parameters kommt.
- Je höher die Frequenz, desto höher sind die Schaltverluste. Dies ist darauf zurückzuführen, dass die Schaltzeit des Schlüssels endlich ist. Im verriegelten Zustand fällt die gesamte Versorgungsspannung über das Schlüsselelement, aber es fließt fast kein Strom. Im offenen Zustand fließt der volle Laststrom durch die Taste, aber der Spannungsabfall ist gering, da der Durchlasswiderstand einige Ohm beträgt. In beiden Fällen ist die Verlustleistung vernachlässigbar. Der Übergang von einem Zustand in den anderen erfolgt schnell, aber nicht sofort. Während des Öffnungs-/Schließvorgangs fällt an dem teilweise geöffneten Element eine hohe Spannung ab und gleichzeitig fließt ein beträchtlicher Strom durch das Element. Während dieser Zeit erreicht die Verlustleistung hohe Werte. Dieser Zeitraum ist kurz und der Schlüssel hat keine Zeit, sich stark zu erwärmen. Mit zunehmender Frequenz gibt es jedoch mehr solcher Zeitintervalle pro Zeiteinheit und der Wärmeverlust nimmt zu. Deshalb ist es wichtig, bei der Konstruktion von Schlüsseln schnell wirkende Elemente zu verwenden.
- Bei der Kontrolle einer Motoren die Frequenz muss aus dem Bereich der für Menschen lesbaren Frequenzen herausgeführt werden - 25kHz und mehr. Denn eine niedrigere Schaltfrequenz führt zu einem unangenehmen Pfeifgeräusch.
Diese Anforderungen stehen oft im Widerspruch zueinander, so dass die Wahl der Frequenz in einigen Fällen einen Kompromiss darstellt.
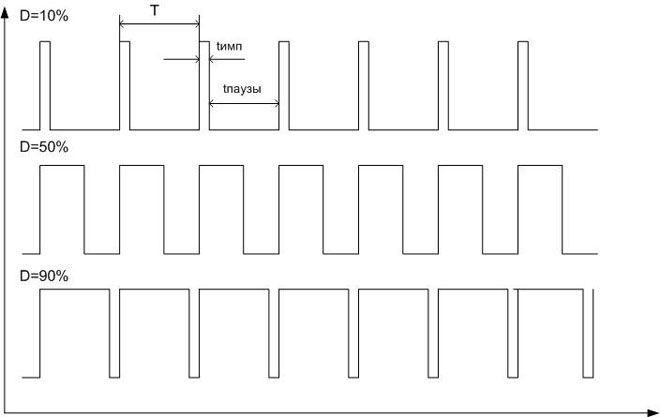
Der Modulationswert ist durch das Tastverhältnis gekennzeichnet. Da die Impulswiederholrate konstant ist, ist auch die Periodendauer konstant (T=1/f). Eine Periode besteht aus einem Impuls und einer Pause, die eine Dauer von timp und tPause, wobei timp+tPause=Т. Ratio ist das Verhältnis von Impulsdauer zu Periode - S=timp/T. In der Praxis erwies es sich jedoch als zweckmäßiger, den umgekehrten Wert zu verwenden - Füllfaktor: D=1/S=T/timp.. Noch bequemer ist es, den Füllfaktor in Prozent auszudrücken.
Was ist der Unterschied zwischen PWM und PWM
In der ausländischen Fachliteratur wird nicht zwischen Pulsweitenmodulation und Pulsweitensteuerung (PWM) unterschieden. Russische Experten versuchen, diese Konzepte zu unterscheiden. Bei der PWM handelt es sich um eine Modulation, d. h. um die Veränderung des Trägersignals unter dem Einfluss eines anderen, modulierenden Signals. Das Trägersignal dient als Träger und das Modulationssignal setzt die Information. Und die Pulsbreitensteuerung ist die Regelung des Lastbetriebs mit Hilfe von PWM.
Gründe und Anwendungen für PWM
Das Prinzip der Pulsweitenmodulation wird verwendet in Drehzahlregelung für leistungsstarke Induktionsmotoren. In diesem Fall wird ein modulierendes variables Frequenzsignal (einphasig oder dreiphasig) mit einem Sinusgenerator kleiner Leistung erzeugt und dem Träger analog überlagert. Das Ausgangssignal ist ein PWM-Signal, das an die Leistungsbedarfstasten weitergeleitet wird. Die resultierende Impulsfolge kann dann durch einen Tiefpassfilter, z. B. eine einfache RC-Kette, geleitet werden, und die ursprüngliche Sinuswelle kann isoliert werden. Sie können auch darauf verzichten - die Filterung erfolgt auf natürliche Weise durch die Trägheit des Motors. Es liegt auf der Hand, dass die Ausgangswellenform umso näher an der ursprünglichen Sinuskurve liegt, je höher die Trägerfrequenz ist.
Es stellt sich natürlich die Frage, warum das Oszillatorsignal nicht auf einmal verstärkt werden kann, zum Beispiel, Verwendung von Hochleistungstransistoren? Denn das Regelelement, das im linearen Modus arbeitet, verteilt die Leistung zwischen der Last und dem Schalter um. Dies führt dazu, dass viel Energie für das Schlüsselelement verschwendet wird. Arbeitet dagegen ein leistungsfähiges Regelelement im Tastbetrieb (Trinistor, Triac, RGBT-Transistor), wird die Leistung über die Zeit verteilt. Die Verluste werden viel geringer sein und der Wirkungsgrad wird viel höher sein.
In der Digitaltechnik gibt es keine besondere Alternative zur Pulsbreitensteuerung. Die Signalamplitude ist dort konstant, Spannung und Strom können nur durch Modulation der Trägerimpulsbreite und anschließende Mittelwertbildung verändert werden. Daher wird die PWM für die Spannungs- und Stromregelung in Anwendungen verwendet, die das Impulssignal mitteln können. Die Mittelwertbildung kann auf verschiedene Weise erfolgen:
- Durch die Trägheit der Last. Die thermische Trägheit von z. B. thermoelektrischen Heizungen und Glühlampen sorgt dafür, dass die geregelten Objekte in den Impulspausen nicht merklich abkühlen.
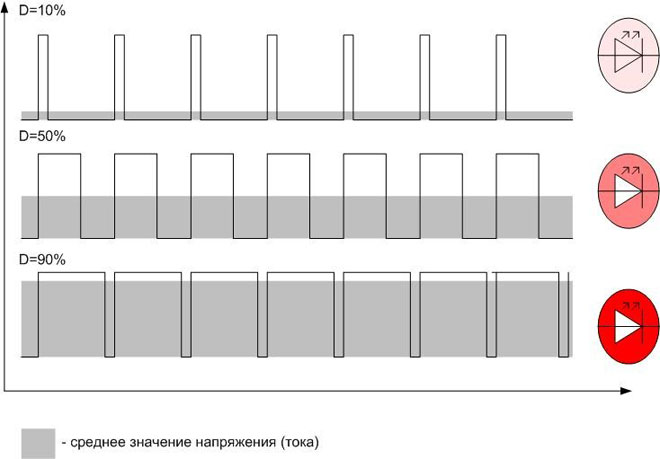
- Das liegt an der Trägheit der Wahrnehmung. Eine LED leuchtet von Puls zu Puls, aber das menschliche Auge nimmt dies nicht wahr und empfindet es als ein konstantes Leuchten mit unterschiedlicher Intensität. Dieses Prinzip wird zur Steuerung der Helligkeit von LED-Punkten verwendet. Aber ein paar hundert Hertz unmerkliches Blinken sind immer noch vorhanden und ermüden die Augen.
- Aufgrund der mechanischen Trägheit. Diese Eigenschaft wird bei der Steuerung von DC-Kollektormotoren verwendet. Mit der richtigen Steuerfrequenz hat der Motor keine Zeit, in den Totzeitpausen zu blockieren.
Daher wird die PWM dort eingesetzt, wo der durchschnittliche Spannungs- oder Stromwert eine entscheidende Rolle spielt. Zusätzlich zu den oben genannten Fällen regelt die PWM-Methode den durchschnittlichen Strom in Schweißmaschinen, Batterieladegeräten usw.
Wenn eine natürliche Mittelwertbildung nicht möglich ist, kann diese Aufgabe in vielen Fällen von dem bereits erwähnten Tiefpassfilter (LPF) in Form einer RC-Kette. Für praktische Zwecke ist dies ausreichend, aber es sollte klar sein, dass es unmöglich ist, das ursprüngliche Signal von der PWM mit einem LPF ohne Verzerrung zu trennen. Schließlich enthält das PWM-Spektrum eine unendlich große Anzahl von Oberwellen, die zwangsläufig in die Filterbandbreite fallen. Machen Sie sich also keine Illusionen über die Form der rekonstruierten Sinuswelle.
Die PWM-Steuerung einer RGB-LED ist sehr effektiv und effizient. Dieses Gerät hat drei p-n-Übergänge - rot, blau und grün. Indem man die Helligkeit jedes Kanals separat variiert, kann fast jede LED-Farbe (außer reinem Weiß) erreicht werden. Die Möglichkeiten zur Erzeugung von Lichteffekten mit PWM sind endlos.
Die häufigste Anwendung für ein digitales pulsbreitenmoduliertes Signal ist die Steuerung des durchschnittlichen Stroms oder der durchschnittlichen Spannung, die durch eine Last fließt. Aber es ist auch möglich, diese Art der Modulation auf unkonventionelle Weise zu nutzen. Alles hängt von der Phantasie des Designers ab.
Ähnliche Artikel: