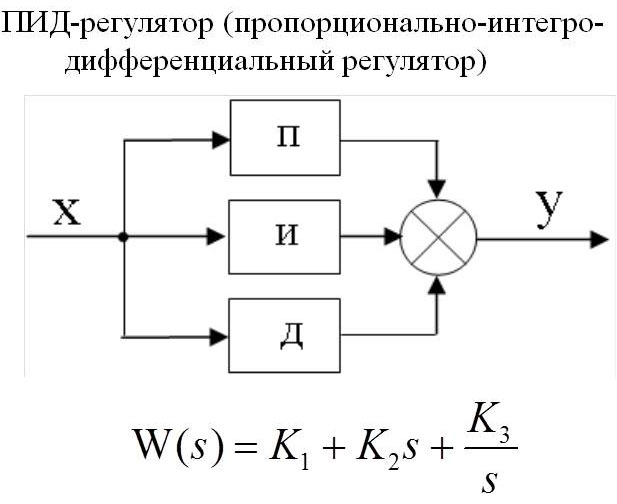
Ein Differential-Proportional-Integral-Regler ist ein Gerät, das in automatisierten Systemen installiert wird, um einen bestimmten Parameter zu halten, der sich ändern kann.
Es ist auf den ersten Blick verwirrend, aber es ist auch möglich, die PID-Regelung für Dummies zu erklären, d. h. Personen, die mit elektronischen Systemen und Geräten nicht so vertraut sind.
Inhalt
Was ist ein PID-Regler?
Ein PID-Regler ist ein in den Regelkreis integriertes Gerät mit obligatorischer Rückführung. Er ist so konzipiert, dass er Sollwerte, z. B. die Lufttemperatur, einhält.
Das Gerät liefert auf der Grundlage der von den Sensoren oder Transmittern empfangenen Daten ein Steuersignal oder ein Ausgangssignal an das Steuergerät. Die Regler haben eine hohe Einschwinggenauigkeit und Leistungsqualität.
Drei Koeffizienten des PID-Reglers und Funktionsprinzip
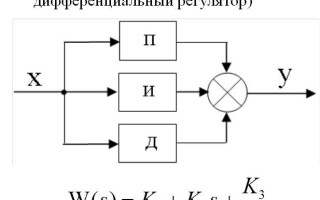
Die Aufgabe des PID-Reglers besteht darin, ein Ausgangssignal für die Leistung zu liefern, die erforderlich ist, um den geregelten Parameter auf einem vorgegebenen Niveau zu halten. Zur Berechnung des Wertes wird eine komplexe mathematische Formel verwendet, die 3 Koeffizienten enthält - proportional, integral, differential.
Nehmen wir als Regelungsobjekt einen Tank mit Wasser, in dem die Temperatur durch Regulierung des Öffnungsgrads eines Dampfventils auf einem bestimmten Niveau gehalten werden muss.
Die proportionale Komponente erscheint im Moment der Nichtübereinstimmung mit den Eingangsdaten. Einfach ausgedrückt: Die Differenz zwischen der Ist-Temperatur und der Soll-Temperatur wird mit einem einstellbaren Koeffizienten multipliziert und man erhält das Ausgangssignal, das an das Ventil angelegt wird. Mit anderen Worten: Sobald die Temperatur gesunken ist, wird der Heizvorgang gestartet; sobald sie über die gewünschte Temperatur gestiegen ist, wird er abgeschaltet oder sogar abgekühlt.
Als nächstes kommt der Integralanteil, der die Auswirkungen der Umgebung oder anderer störender Einflüsse auf die Einhaltung der Solltemperatur kompensieren soll. Da es immer zusätzliche Faktoren gibt, die auf die zu steuernden Geräte einwirken, ändert sich die Zahl bereits, wenn die Daten zur Berechnung des proportionalen Anteils eintreffen. Und je größer die äußeren Einflüsse sind, desto größer sind die Schwankungen in der Zahl. Es kommt zu Leistungssprüngen.
Die Integral-Komponente versucht, den Temperaturwert auf der Grundlage früherer Werte zurückzugeben, wenn er sich geändert hat. Das Verfahren wird in dem folgenden Video näher beschrieben.
Dann wird das Ausgangssignal des Reglers entsprechend dem Koeffizienten zur Anhebung oder Absenkung der Temperatur verwendet. Im Laufe der Zeit wird ein Wert gewählt, der die externen Faktoren ausgleicht, und die Schwankungen verschwinden.
Das Integral wird zur Fehlerbeseitigung durch Berechnung des statischen Fehlers verwendet. Das Wichtigste bei diesem Verfahren ist die Auswahl des richtigen Koeffizienten, da sich der Fehler (Fehlanpassung) sonst auch auf die integrale Komponente auswirkt.
Die dritte PID-Komponente ist die Differenzialkomponente. Sie soll die Auswirkungen von Verzögerungen ausgleichen, die zwischen der Einwirkung auf das System und der Rückmeldung auftreten. Der Proportionalregler liefert so lange Strom, bis die Temperatur den richtigen Wert erreicht hat, aber es gibt immer wieder Fehler bei der Weitergabe von Informationen an das Gerät, insbesondere bei hohen Werten. Dies kann zu einer Überhitzung führen. Das Differential antizipiert Abweichungen, die durch Verspätungen oder Umwelteinflüsse entstehen, und reduziert die gelieferte Leistung im Voraus.
Einrichten eines PID-Reglers
Der PID-Regler wird mit 2 Methoden eingestellt:
- Bei der Synthese werden die Parameter auf der Grundlage des Systemmodells berechnet. Eine solche Abstimmung ist genau, erfordert aber eine gründliche Kenntnis der Theorie der automatischen Steuerung. Sie kann nur von Ingenieuren und Wissenschaftlern durchgeführt werden. Da es notwendig ist, die Strömungseigenschaften zu erfassen und viele Berechnungen anzustellen.
- Die manuelle Methode basiert auf Versuch und Irrtum. Dazu werden die Daten eines bereits bestehenden Systems verwendet und einige Anpassungen an einem oder mehreren Reglerkoeffizienten vorgenommen. Nach dem Einschalten und der Beobachtung des Endergebnisses werden die Parameter in die gewünschte Richtung geändert. Und so weiter, bis das gewünschte Leistungsniveau erreicht ist.
Theoretische Analyse- und Abstimmungsmethoden werden in der Praxis selten angewandt, da die Eigenschaften des Regelungsobjekts nicht bekannt sind und es eine Vielzahl von möglichen Störeinflüssen gibt. Häufiger sind experimentelle Methoden, die auf der Beobachtung des Systems beruhen.
Moderne automatisierte Prozesse werden als spezialisierte Module implementiert, die von einer Software gesteuert werden, um die Regelkoeffizienten anzupassen.
Zweck des PID-Reglers
Der PID-Regler dient dazu, einen bestimmten Wert - Temperatur, Druck, Füllstand eines Behälters, Durchfluss in einer Rohrleitung, Konzentration eines Stoffes usw. - auf einem bestimmten Niveau zu halten, indem er die Regelwirkung von Stellgliedern, wie z. B. automatischen Regelventilen, verändert und dabei proportionale, integrierende und differenzierende Werte für seine Einstellung verwendet.
Ziel der Anwendung ist es, ein präzises Steuersignal zu erhalten, das in der Lage ist, große Anlagen und sogar Kraftwerksreaktoren zu steuern.
Beispiel für einen Temperaturregelkreis
PID-Regler werden häufig bei der Temperaturregelung eingesetzt. Nehmen wir das einfache Beispiel der Erwärmung von Wasser in einem Tank als Beispiel für diesen automatischen Prozess.
Der Tank ist mit einer Flüssigkeit gefüllt, die auf die gewünschte Temperatur erwärmt und auf dem gewünschten Niveau gehalten werden muss. Im Inneren des Tanks befindet sich ein Temperatursensor - ein Thermoelement Thermoelement oder Widerstandsthermometer und ist direkt mit dem PID-Regler verbunden.
Wir liefern Dampf, um die Flüssigkeit zu erhitzen, wie in der Abbildung unten dargestellt, mit dem automatischen Regelventil. Das Ventil selbst erhält ein Signal vom Steuergerät. Der Bediener gibt den Temperatursollwert in den PID-Regler ein, der im Tank gehalten werden soll.

Wenn die Koeffizienten des Reglers falsch sind, springt die Wassertemperatur und das Ventil ist vollständig geöffnet und geschlossen. In diesem Fall müssen die PID-Koeffizienten berechnet und neu eingegeben werden. Bei richtiger Vorgehensweise gleicht sich das System nach kurzer Zeit aus und die Temperatur im Tank wird auf der eingestellten Temperatur gehalten, wobei sich der Öffnungsgrad des Regelventils in der Mittelstellung befindet.
Ähnliche Artikel: