Ein Sensor ist im Allgemeinen ein Gerät, das eine physikalische Größe in eine andere umwandelt, die verarbeitet, übertragen oder umgewandelt werden kann. Bei der ersten handelt es sich in der Regel um eine physikalische Größe, die nicht direkt gemessen werden kann (Temperatur, Geschwindigkeit, Verschiebung usw.), bei der zweiten um ein elektrisches oder optisches Signal. Sensoren, deren Grundelement die Induktionsspule ist, nehmen im Bereich der Messgeräte eine eigene Nische ein.
Über
Wie induktive Sensoren aufgebaut sind und wie sie funktionieren
Induktive Sensoren sind von ihrem Funktionsprinzip her aktiv, d.h. sie benötigen einen externen Oszillator. Dadurch wird in der Induktionsspule ein Signal mit einer bestimmten Frequenz und Amplitude erzeugt.
Der Strom, der durch die Spulen fließt, erzeugt ein Magnetfeld. Wenn ein leitender Gegenstand in das Magnetfeld eintritt, ändern sich die Parameter der Spule. Es bleibt nur noch, diese Veränderung zu erkennen.
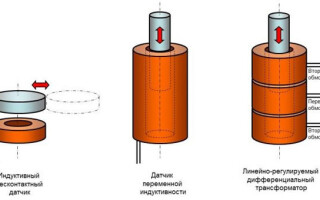
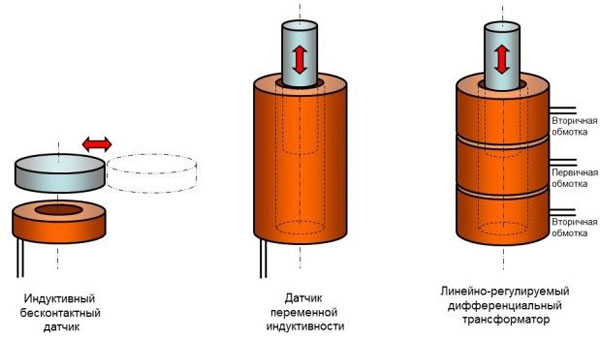
Einfache berührungslose Sensoren reagieren auf die Anwesenheit von Metallobjekten im Nahfeld der Spule. Dadurch ändert sich die Impedanz der Spule. Diese Änderung muss in ein elektrisches Signal umgewandelt werden, das durch eine Vergleichsschaltung verstärkt und/oder erfasst wird.
Ein anderer Sensortyp reagiert auf Änderungen der Längsposition eines Objekts, das als Spulenkern dient. Wenn sich die Position des Objekts ändert, gleitet es in die Spule hinein oder aus ihr heraus, wodurch sich seine Induktivität ändert. Diese Veränderung kann in ein elektrisches Signal umgewandelt und gemessen werden. Bei einer anderen Version dieses Sensors wird ein Objekt von außen auf die Spule geschoben. Dies führt zu einer Verringerung der Induktivität aufgrund der abschirmenden Wirkung.
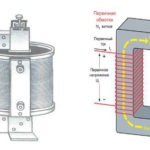
Eine weitere Variante des induktiven Wegsensors ist der Linear Variable Differential Transformer (LVDT). Es handelt sich um eine zusammengesetzte Spule, die in der folgenden Reihenfolge hergestellt wird:
- Sekundärspule 1;
- Primärwicklung;
- Sekundärwicklung 2.
Das Signal des Generators wird an die Primärwicklung angelegt. Das von der mittleren Spule erzeugte Magnetfeld induziert in jeder der Sekundärspulen eine EMK (Prinzip des Transformators).Transformatorprinzip). Durch die Bewegung des Kerns ändert sich die gegenseitige Kopplung zwischen den Spulen, wodurch sich die elektromotorische Kraft in jeder der Wicklungen ändert. Diese Veränderung kann von der Messschaltung erkannt werden. Da die Länge des Kerns geringer ist als die Gesamtlänge der Verbundspule, kann das Verhältnis der EMK in den Sekundärwicklungen die Position des Objekts eindeutig bestimmen.
Ein Drehgeber basiert auf demselben Prinzip der Veränderung der induktiven Kopplung zwischen den Wicklungen. Es besteht aus zwei koaxialen Spulen. Das Signal wird an eine der Wicklungen angelegt, die EMK in der zweiten Wicklung hängt vom gegenseitigen Drehwinkel ab.
Aus dem Funktionsprinzip ergibt sich, dass induktive Sensoren, unabhängig von ihrer Bauart, berührungslos arbeiten. Sie arbeiten auf Distanz und erfordern keinen direkten Kontakt mit dem zu überwachenden Objekt.
Vor- und Nachteile von induktiven Sensoren
Die Vorteile der induktiven Sensoren sind vor allem
- Robuste Konstruktion;
- keine Kontaktverbindungen;
- hohe Ausgangsleistung, die den Einfluss von Rauschen reduziert und die Steuerschaltung vereinfacht;
- hohe Empfindlichkeit;
- Möglichkeit des Betriebs mit einer Wechselstromversorgung mit Industriefrequenz.
Die Hauptnachteile der induktiven Sensoren sind ihre Größe, ihr Gewicht und ihre Komplexität. Um die Spulen mit den erforderlichen Parametern zu wickeln, sind spezielle Geräte erforderlich. Ein weiterer Nachteil ist, dass die Amplitude des Signals vom Hauptoszillator genau eingehalten werden muss. Der Empfindlichkeitsbereich ändert sich auch, wenn sich die Signalamplitude ändert. Da die Sensoren nur mit Wechselstrom arbeiten, wird die Beibehaltung der Amplitude zu einem echten technischen Problem. Es ist nicht möglich, den Sensor direkt (oder über einen Abspanntransformator) an ein Haushalts- oder Industrienetz anzuschließen, wo die Spannungsschwankungen in Amplitude oder Frequenz selbst im Normalbetrieb bis zu 10 % betragen können, was die Messgenauigkeit inakzeptabel macht.
Die Messgenauigkeit kann auch durch folgende Faktoren beeinflusst werden:
- Externe Magnetfelder (eine Abschirmung des Sensors ist aufgrund seines Funktionsprinzips nicht möglich);
- seitliche EMF-Induktionen in den Versorgungs- und Messkabeln
- Ungenauigkeiten bei der Herstellung;
- Fehler in der Sensorkennlinie;
- Spiel oder Verformungen an der Einbaustelle der Sonde, die die allgemeine Leistung nicht beeinträchtigen;
- Abhängigkeit der Genauigkeit von der Temperatur (die Parameter des Wickeldrahtes, einschließlich seines Widerstandes, ändern sich).
Die Tatsache, dass Induktivitätssensoren nicht auf die Anwesenheit von dielektrischen Objekten in ihrem Magnetfeld reagieren, kann sowohl als Vorteil als auch als Nachteil betrachtet werden. Dies schränkt zum einen den Anwendungsbereich ein. Andererseits macht es sie unempfindlich gegenüber Schmutz, Fett, Sand usw. auf den überwachten Objekten.
Wenn man die Grenzen und möglichen Grenzen induktiver Sensoren versteht, können die Vorteile induktiver Sensoren rationell genutzt werden.
Anwendungsbereiche für induktive Sensoren
Induktive Näherungsschalter werden häufig als Endschalter eingesetzt. Diese Geräte werden für eine breite Palette von Anwendungen eingesetzt:
- in Sicherheitssystemen als Sensoren für das unbefugte Öffnen von Fenstern und Türen;
- in Fernwirksystemen als Endlagensensoren für Baugruppen und Mechanismen;
- im täglichen Leben in Anzeigekreisen für die geschlossene Stellung von Türen, Fensterflügeln;
- zum Zählen von Objekten (z. B. auf einem Förderband);
- zur Bestimmung der Drehgeschwindigkeit von Zahnrädern (jeder Zahn, der am Sensor vorbeigeht, erzeugt einen Impuls);
- In anderen Situationen.

Winkelmessgeräte können zur Bestimmung von Drehwinkeln von Wellen, Getrieben und anderen rotierenden Einheiten sowie als Absolutwertgeber eingesetzt werden. Sie können neben Längenmessgeräten auch in Werkzeugmaschinen und in der Robotik eingesetzt werden. Überall dort, wo es notwendig ist, die genaue Position von Maschinenkomponenten zu kennen.
Praktische Anwendungen für induktive Sensoren
In der Praxis können induktive Sensoren auf unterschiedliche Weise eingesetzt werden. Die einfachste Implementierung und Einbindung ist der Zweidraht-Einzelsensor, der das Vorhandensein von Metallobjekten innerhalb seines Erfassungsbereichs überwacht. Diese Geräte werden häufig auf der Grundlage eines W-förmigen Kerns hergestellt, aber das ist nicht entscheidend. Diese Konstruktion ist einfacher zu fertigen.
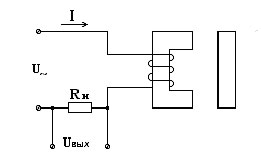
Wenn sich der Spulenwiderstand ändert, ändern sich der Strom im Stromkreis und der Spannungsabfall an der Last. Diese Veränderungen können erkannt werden. Das Problem ist, dass der Lastwiderstand kritisch wird. Wenn er zu groß ist, ist die Stromänderung beim Auftauchen eines Metallgegenstands relativ gering. Dadurch wird die Empfindlichkeit und Immunität des Systems verringert. Wenn er klein ist, ist der Strom im Stromkreis hoch und es wird ein robusterer Sensor benötigt.
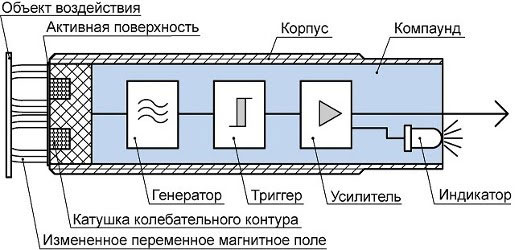
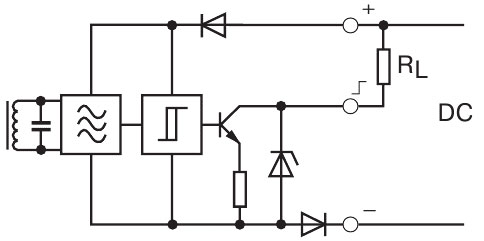
Aus diesem Grund gibt es Konstruktionen, bei denen die Sensorschaltung in das Sensorgehäuse eingebaut ist. Ein Generator erzeugt Impulse, die die Induktionsspule speisen. Bei Erreichen eines bestimmten Pegels wird ein Auslöser betätigt, der von Zustand 0 auf 1 oder umgekehrt umschaltet. Ein Pufferverstärker verstärkt das Signal in Bezug auf Leistung und/oder Spannung, bringt die LED zum Leuchten (Erlöschen) und gibt ein diskretes Signal für die externe Schaltung aus.
Das Ausgangssignal kann erzeugt werden:
- mit Hilfe eines elektromagnetischen oder Halbleiterrelais - Null- oder Einheits-Spannungspegel;
- "trockener Kontakt" elektromagnetisches Relais;
- offener Kollektor Transistor (n-p-n- oder p-n-p-Strukturen).
In diesem Fall sind drei Drähte erforderlich, um den Sensor anzuschließen:
- Stromversorgung;
- gemeinsame Leitung (0 Volt);
- Signalkabel.
Solche Sensoren können auch mit Gleichspannung betrieben werden. Ihre Induktivitätsimpulse werden von einem internen Oszillator erzeugt.
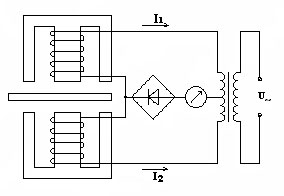
Differentialsensoren werden zur Positionsüberwachung eingesetzt. Befindet sich das zu überwachende Objekt symmetrisch zu beiden Spulen, so ist der Strom durch beide Spulen gleich groß. Wenn eine der beiden Spulen in Richtung des Feldes vorgespannt ist, entsteht eine Unwucht, der Gesamtstrom ist nicht mehr Null, was durch eine Anzeige mit einem Pfeil in der Mitte der Skala festgestellt werden kann. Mit dem Indikator können sowohl die Größe des Versatzes als auch seine Richtung bestimmt werden. Anstelle einer Messuhr kann ein Steuerkreis eingesetzt werden, der bei einer Positionsänderung ein Signal abgibt, Maßnahmen zur Ausrichtung des Objekts ergreift, Prozesskorrekturen vornimmt usw.

Sensoren, die auf dem Prinzip der linear geregelten Differenzialtransformatoren beruhen, werden als komplette Einheiten hergestellt, die aus einem Rahmen mit Primär- und Sekundärwicklungen und einem darin beweglichen Stab bestehen (dieser kann federbelastet sein). Die Drähte für das Generatorsignal und die EMK der Sekundärwicklungen sind nach außen geführt. Das zu kontrollierende Objekt kann mechanisch mit dem Schaft verbunden werden. Er kann auch aus dielektrischem Material bestehen - für die Messung ist nur die Position des Stiels wichtig.
Trotz einiger inhärenter Nachteile schließt der induktive Sensor viele Bereiche, die mit der berührungslosen Erfassung von Objekten im Raum zusammenhängen. Trotz der ständigen Weiterentwicklung der Technik wird dieser Gerätetyp in absehbarer Zeit nicht vom Messgerätemarkt verschwinden, da seine Wirkung auf den fundamentalen Gesetzen der Physik beruht.
Ähnliche Artikel: