O sistema de corrente eléctrica trifásica foi desenvolvido no final do século XIX pelo cientista russo M.O.Dolivo-Dobrovolsky. Três fases com tensões deslocadas de 120 graus uma para a outra, entre outras vantagens, facilitam a criação de um campo magnético rotativo. Este campo entra em contacto com os rotores dos motores assíncronos trifásicos mais comuns e mais simples.
Os três enrolamentos do estator destes motores estão geralmente ligados numa ligação em estrela ou delta. Os termos "estrela" e "delta", abreviados como S e D, são utilizados na literatura estrangeira. A designação mnemónica mais comum é D e Y, o que por vezes pode levar a confusão - a letra D pode ser usada para designar tanto "estrela" como "delta".
Conteúdo
Tensões de fase e de linha
Para compreender as diferenças entre as ligações sinuosas, é primeiro necessário compreender os conceitos de tensões de fase e tensões de linha. Uma tensão de fase é a tensão entre o início e o fim de uma fase. A tensão linear é a tensão entre os mesmos terminais de fases diferentes.
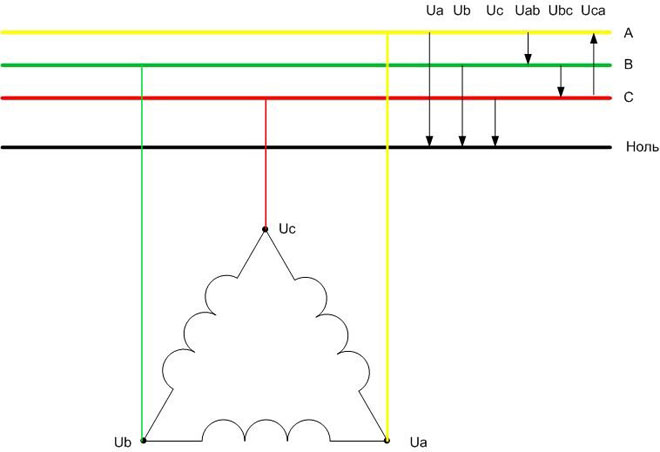
Para uma rede trifásica, as tensões de linha são as tensões entre fases, por exemplo, A e B, e as tensões de fase são as tensões entre cada fase e o condutor neutro.
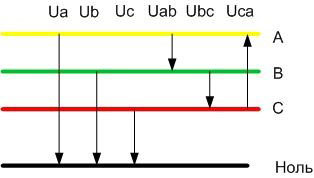
Assim, as tensões Ua, Ub, Uc serão tensões de fase e Uab, Ubc, Uca serão tensões de linha. A diferença entre estas tensões é de uma só voltagem. Assim, para uma rede doméstica e industrial de 0,4 kV, as tensões de linha são de 380 volts e as tensões de fase são de 220 volts.
Ligação de enrolamentos motores em ligação estrela
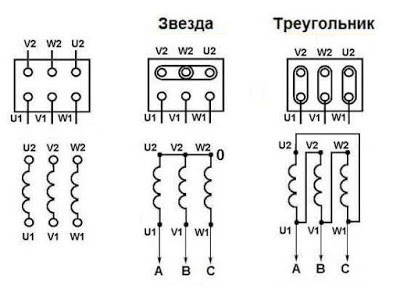
Numa ligação estelar, os três enrolamentos são unidos num ponto comum com os seus extremos estelares. Os fins livres estão cada um ligado a uma fase diferente. Em alguns casos, o ponto comum está ligado ao barramento neutro do sistema eléctrico.
A figura mostra que para esta ligação, a tensão da fase de rede é aplicada a cada enrolamento (para redes de 0,4kV - 220 volts).
Ligação do enrolamento do motor eléctrico em ligação delta
Com o circuito delta, as extremidades sinuosas são ligadas em série. Forma-se uma espécie de círculo, mas o nome "delta" é tomado na literatura por causa da disposição frequentemente utilizada. O fio neutro nesta versão não tem nenhum lugar a ser ligado.
Obviamente, as tensões aplicadas a cada enrolamento serão lineares (380 volts por enrolamento).
Comparação dos diagramas de cablagem uns com os outros
Para comparar os dois circuitos um contra o outro, é necessário calcular a potência eléctrica desenvolvida pelo motor eléctrico para uma ou outra ligação. Para tal, considerar os conceitos de corrente de linha (Ilin) e corrente de fase (Iphase). A corrente de fase é a corrente que flui através do enrolamento da fase. A corrente linear passa através de um condutor ligado ao terminal de enrolamento.
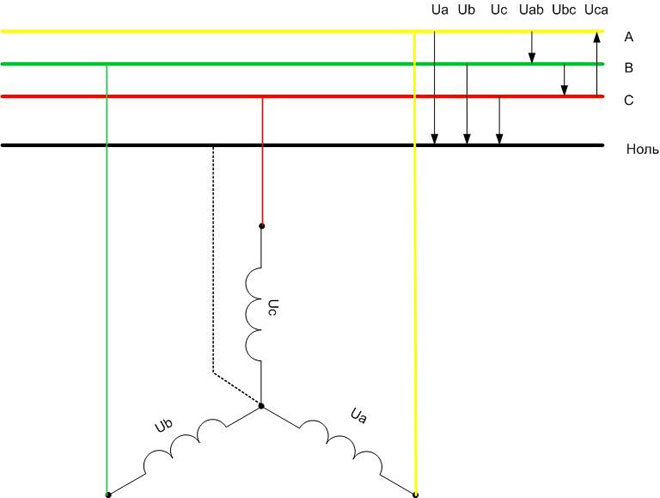
Em redes até 1000 volts, a fonte de electricidade é um transformadorO secundário de um transformador cujo enrolamento está ligado em estrela (caso contrário não seria possível fornecer um condutor neutro), ou um gerador cujo enrolamento está ligado da mesma forma.
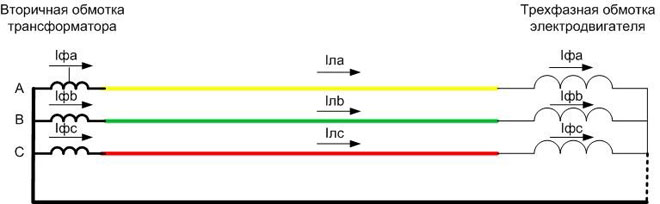
Pode ser visto pela figura que na ligação estrela as correntes condutoras e as correntes de enrolamento do motor são iguais. A corrente numa fase é determinada pela tensão de fase:
![\[I_faz=\frac{U_faz}{Z}\]](https://electros.tomathouse.com/wp-content/ql-cache/quicklatex.com-f4518d61a0fe68758ecd5221efdc8d3a_l3.png "Apresentado por QuickLaTeX.com")
onde Z é a resistência de uma fase, podem ser assumidos como iguais. Pode estar escrito que
![[I_faz=I_lin=I_lin=]]](https://electros.tomathouse.com/wp-content/ql-cache/quicklatex.com-be70a1b78bb7c7fd8a17275f34f188ee_l3.png "Apresentado por QuickLaTeX.com")
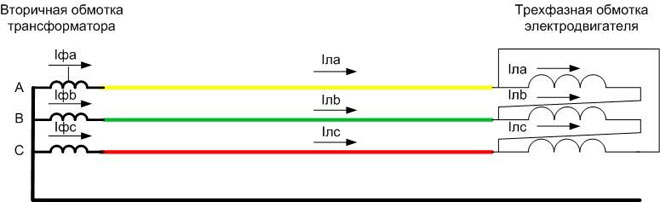
Para a ligação em delta as correntes são diferentes - são determinadas pelas tensões de linha aplicadas à resistência Z:
![\[I_faz=\frac{U_lin}{Z}\]](https://electros.tomathouse.com/wp-content/ql-cache/quicklatex.com-04741f4af117efbb0661c26c4ee10334_l3.png "Apresentado por QuickLaTeX.com")
Daí que, neste caso  .
.
Agora podemos comparar a potência total ( ) consumidos por motores de diferentes circuitos.
) consumidos por motores de diferentes circuitos.
- para uma ligação estrela, a potência aparente é
 ;
; - para ligação em delta a potência aparente é
 .
.
Assim, com ligação em estrela, o motor desenvolve três vezes menos potência do que com ligação em delta. Isto também tem outros efeitos positivos:
- As correntes de influxo são reduzidas;
- o motor funciona e arranca mais suavemente;
- o motor pode fazer face a sobrecargas de curta duração;
- o comportamento térmico do motor assíncrono torna-se mais suave.
O lado oposto da moeda é que um motor com um enrolamento de estrela não pode desenvolver o seu rendimento máximo. Em alguns casos, o torque pode nem sequer ser suficiente para rodar o rotor.
Formas de comutação de circuitos estrela-triângulo
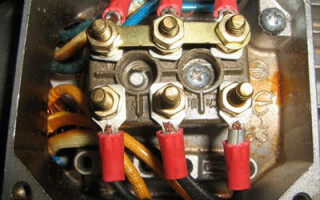
A maioria dos motores são concebidos de modo a que a comutação de uma ligação para outra possa ser efectuada. O início e o fim dos enrolamentos estão localizados no bloco terminal para que a estrela possa ser ligada em delta simplesmente mudando a posição das almofadas de enrolamento.
O proprietário do motor eléctrico pode escolher se quer um arranque suave com correntes de arranque baixas e funcionamento suave ou a potência mais elevada desenvolvida pelo motor. Se ambos forem necessários, é possível mudar automaticamente com contactores de alta potência.
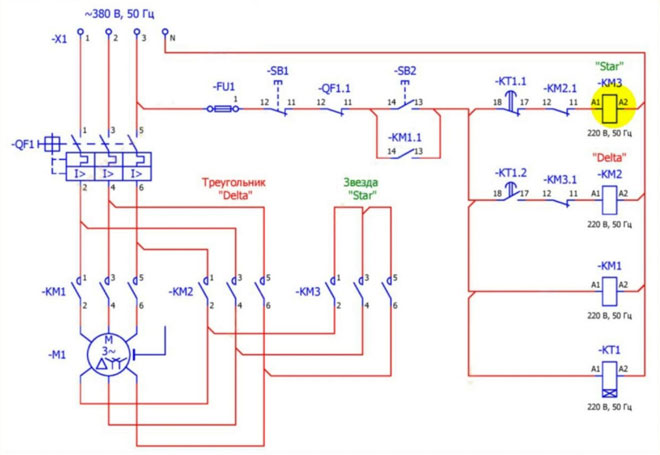
Quando o botão de arranque SB2 é premido, o motor é ligado numa configuração em estrela. O contactor KM3 está energizado, os seus contactos bloqueiam os cabos de enrolamento do motor de um dos lados. Os cabos opostos estão ligados à rede, cada um a uma fase diferente, através dos contactos do KM1. Quando este contactor é energizado, a tensão trifásica é aplicada aos enrolamentos e o rotor do motor é accionado. Após um certo tempo ajustado no relé KT1, a bobina KM3 é comutada, é desenergizada, o contactor KM2 é energizado, transformando os enrolamentos num delta.
As mudanças têm lugar depois de o motor ter ganho velocidade. Este momento pode ser monitorizado através do sensor de velocidade, mas na prática é mais simples. A mudança é controlada por relé de tempo - após 5-7 segundos assume-se que o processo de arranque está terminado e o motor pode ser comutado para a potência máxima. Uma operação prolongada que exceda a carga estelar pode danificar a unidade.
Deve-se ter em mente o seguinte ao realizar esta operação:
- O binário de arranque de um motor ligado em estrela é consideravelmente inferior ao de um motor ligado em delta, pelo que um motor com condições de arranque difíceis nem sempre pode ser ligado desta forma. Simplesmente não vai começar. Tais casos incluem bombas eléctricas que operam com contrapressão, etc. Tais problemas podem ser resolvidos utilizando um motor com um rotor de fase, aumentando suavemente a corrente de excitação no arranque. O arranque em estrela bem sucedido é utilizado com bombas centrífugas a funcionar num portão fechado, cargas de ventiladores no eixo do motor, etc.
- Os enrolamentos do motor eléctrico devem ser capazes de suportar a tensão da linha da rede. É importante não confundir motores D/Y 220/380 volts (tipicamente motores de indução de baixa potência até 4kW) com motores D/Y 380/660 volts (tipicamente 4kW e acima). A rede de 660 volts quase nunca é utilizada, mas apenas motores eléctricos com esta voltagem nominal podem ser utilizados para comutação estrela-triângulo. Uma unidade trifásica 220/380 só pode ser comutada em ligação estrela. Não devem ser utilizados no circuito de comutação.
- Deve ser observada uma pausa entre desligar o contactor estrela e ligar o contactor delta para evitar sobreposições. Mas não deve ser aumentada em demasia para evitar que o motor emperre. Se for o próprio a fazer o circuito, poderá ter de ser ajustado experimentalmente.
A comutação inversa é também utilizada. Faz sentido se um motor potente estiver temporariamente a funcionar com uma pequena carga. O factor de potência é baixo porque o consumo de energia activa é determinado pelo ciclo de funcionamento do motor. A potência reactiva é principalmente determinada pela indutância dos enrolamentos, que é independente da carga no eixo. A fim de melhorar a relação de consumo de energia activa e reactiva, os enrolamentos podem ser mudados para um arranjo em estrela. Isto também pode ser feito manual ou automaticamente.
O circuito de comutação pode ser montado com elementos discretos - relés de tempo, contactores (arrancadores), etc. Existem também soluções prontas a usar que integram o circuito de comutação automática num único recinto. Tudo o que tem de fazer é ligar o motor e a alimentação trifásica aos terminais de saída. Tais dispositivos podem ter nomes diferentes, por exemplo, "relay de tempo de arranque", etc.
Há vantagens e desvantagens em mudar os enrolamentos dos motores em diferentes circuitos. O conhecimento das vantagens e desvantagens é a base para um funcionamento correcto. Então o motor durará muito tempo, trazendo o efeito máximo.
Artigos relacionados: