मॉड्युलेशन ही एक नॉन-लिनियर इलेक्ट्रिकल प्रक्रिया आहे ज्यामध्ये एका सिग्नलचे पॅरामीटर्स (वाहक) दुसर्या सिग्नलद्वारे (मॉड्युलेटिंग, माहिती) बदलले जातात. संवाद अभियांत्रिकीमध्ये वारंवारता, मोठेपणा आणि फेज मॉड्युलेशनचा मोठ्या प्रमाणावर वापर केला जातो. पॉवर इलेक्ट्रॉनिक्स आणि मायक्रोप्रोसेसर तंत्रज्ञानामध्ये पल्स-रुंदी मॉड्यूलेशन व्यापक आहे.
सामग्री
PWM (पल्स-रुंदी मॉड्यूलेशन) म्हणजे काय?
पल्स-रुंदी मॉड्यूलेशनमध्ये मूळ सिग्नलचे मोठेपणा, वारंवारता आणि टप्पा अपरिवर्तित राहतात. माहिती सिग्नलच्या प्रभावाखाली आयताकृती नाडीचा कालावधी (रुंदी) बदलू शकतो. इंग्रजी तांत्रिक साहित्यात ते PWM - पल्स-रुंदी मॉड्यूलेशन या संक्षेपाने दर्शविले जाते.
PWM चे कार्य तत्त्व
पल्स-रुंदी-मॉड्युलेटेड सिग्नल दोन प्रकारे तयार होतो:
- अॅनालॉग
- डिजिटल
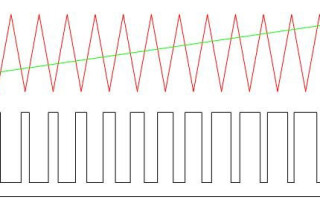
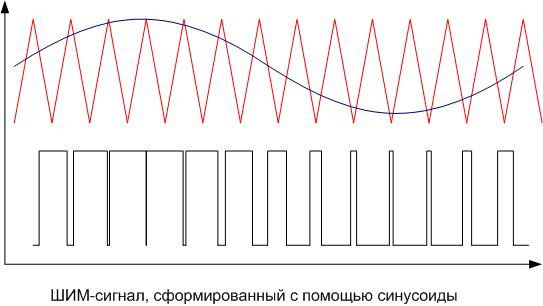
अॅनालॉग PWM सिग्नल जनरेशन पद्धत इनव्हर्टिंगवर सॉटूथ किंवा त्रिकोणी वाहक सिग्नल वापरते. तुलनाकर्त्याचे इनपुटआणि माहिती सिग्नल तुलनाकर्त्याच्या नॉन-इनव्हर्टिंग इनपुटवर पाठविला जातो. जर वाहकाची तात्काळ पातळी मॉड्युलेटिंग सिग्नलपेक्षा जास्त असेल तर, तुलनाकर्ता आउटपुट शून्य असेल, जर कमी असेल तर - एक.आउटपुट हे वाहक त्रिकोण किंवा सॉटूथच्या वारंवारतेशी संबंधित फ्रिक्वेंसी आणि मॉड्युलेटिंग व्होल्टेज पातळीच्या प्रमाणात नाडीची लांबी असलेले एक वेगळे सिग्नल आहे.
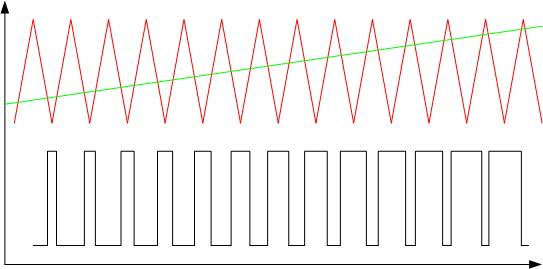
उदाहरण म्हणून, रेखीय-वाढत्या सिग्नलद्वारे त्रिकोणी सिग्नलचे पल्स रुंदी मॉड्यूलेशन दर्शविले आहे. आउटपुट डाळींचा कालावधी आउटपुट सिग्नलच्या पातळीच्या प्रमाणात आहे.
अॅनालॉग PWM कंट्रोलर्स ऑफ-द-शेल्फ इंटिग्रेटेड सर्किट्स म्हणून देखील उपलब्ध आहेत ज्यात तुलनाकर्ता आणि वाहक जनरेशन सर्किटरी असते. बाह्य वारंवारता एन्कोडर घटक कनेक्ट करण्यासाठी आणि माहिती सिग्नल पुरवण्यासाठी इनपुट आहेत. आउटपुटमधून, एक सिग्नल घेतला जातो जो शक्तिशाली बाह्य स्विच नियंत्रित करतो. फीडबॅकसाठी इनपुट देखील आहेत - ते सेट नियमन पॅरामीटर्स राखण्यासाठी आवश्यक आहेत. हे, उदाहरणार्थ, TL494 चिप आहे. ज्या प्रकरणांमध्ये ग्राहक शक्ती तुलनेने कमी आहे, अंगभूत की सह PWM नियंत्रक उपलब्ध आहेत. 3 amps पर्यंतच्या प्रवाहांसाठी LM2596 चिपचे अंतर्गत स्विच डिझाइन केलेले आहे.
डिजिटल पद्धत विशेष चिप्स किंवा मायक्रोप्रोसेसर वापरून केली जाते. नाडीची लांबी अंतर्गत प्रोग्रामद्वारे नियंत्रित केली जाते. लोकप्रिय PIC आणि AVR सह अनेक मायक्रोकंट्रोलरमध्ये हार्डवेअर PWM अंमलबजावणीसाठी ऑनबोर्ड मॉड्यूल आहे. PWM सिग्नल मिळविण्यासाठी मॉड्यूल सक्रिय करणे आणि त्याचे ऑपरेटिंग पॅरामीटर्स सेट करणे आवश्यक आहे. असे कोणतेही मॉड्यूल नसल्यास, आपण पूर्णपणे सॉफ्टवेअर पद्धतीने PWM व्यवस्थापित करू शकता, हे कठीण नाही. ही पद्धत अधिक शक्यता देते आणि आउटपुटच्या लवचिक वापरामुळे अधिक स्वातंत्र्य देते, परंतु नियंत्रकाची अधिक संसाधने समाविष्ट करते.
PWM सिग्नल वैशिष्ट्ये
PWM सिग्नलची महत्वाची वैशिष्ट्ये आहेत:
- मोठेपणा (यू);
- वारंवारता (f);
- ड्युटी सायकल (एस) किंवा फिल फॅक्टर डी.
व्होल्ट्समधील मोठेपणा लोडवर अवलंबून सेट केले जाते. हे ग्राहकांचे नाममात्र पुरवठा व्होल्टेज प्रदान करणे आवश्यक आहे.
पल्स-रुंदी मोड्यूलेटेड सिग्नलची वारंवारता खालील विचारांतून निवडली जाते:
- वारंवारता जितकी जास्त असेल तितकी नियमन अचूकता जास्त.
- वारंवारता डिव्हाइसच्या प्रतिसाद वेळेपेक्षा कमी नसावी, जी PWM द्वारे नियंत्रित केली जाते, अन्यथा नियमन केलेल्या पॅरामीटरचे लक्षणीय स्पंदन होतील.
- वारंवारता जितकी जास्त असेल तितके जास्त स्विचिंग नुकसान. हे की स्विचिंग वेळ मर्यादित आहे या वस्तुस्थितीमुळे आहे. लॅच केलेल्या स्थितीत, संपूर्ण पुरवठा व्होल्टेज मुख्य घटकावर पडतो, परंतु तेथे जवळजवळ कोणतेही प्रवाह नाही. खुल्या स्थितीत, पूर्ण लोड करंट कीमधून वाहते, परंतु व्होल्टेज ड्रॉप लहान आहे कारण पास-थ्रू प्रतिकार काही ओहम आहे. दोन्ही प्रकरणांमध्ये, वीज अपव्यय नगण्य आहे. एका राज्यातून दुस-या राज्यात संक्रमण जलद आहे, परंतु त्वरित नाही. ओपन-क्लोज प्रक्रियेदरम्यान, अंशतः उघडलेल्या घटकावर मोठा व्होल्टेज कमी होतो आणि त्याच वेळी त्यातून एक महत्त्वपूर्ण प्रवाह वाहतो. यावेळी पॉवर अपव्यय उच्च मूल्यांपर्यंत पोहोचते. हा कालावधी लहान आहे, कीला जास्त उबदार होण्यासाठी वेळ नाही. परंतु जसजशी वारंवारता वाढते तसतसे प्रति युनिट वेळेत असे अधिक वेळा असतात आणि उष्णतेचे नुकसान वाढते. म्हणून, की बांधण्यासाठी जलद-अभिनय घटक वापरणे महत्वाचे आहे.
- नियंत्रण करताना एका मोटरचे वारंवारता माणसाला ऐकू येणार्या श्रेणीच्या पलीकडे असली पाहिजे - 25 kHz आणि त्याहून अधिक. कारण कमी PWM फ्रिक्वेन्सीवर, अप्रिय शिट्टी वाजते.
या आवश्यकता सहसा एकमेकांशी संघर्ष करतात, म्हणून काही प्रकरणांमध्ये वारंवारतेची निवड ही तडजोडीचा शोध आहे.
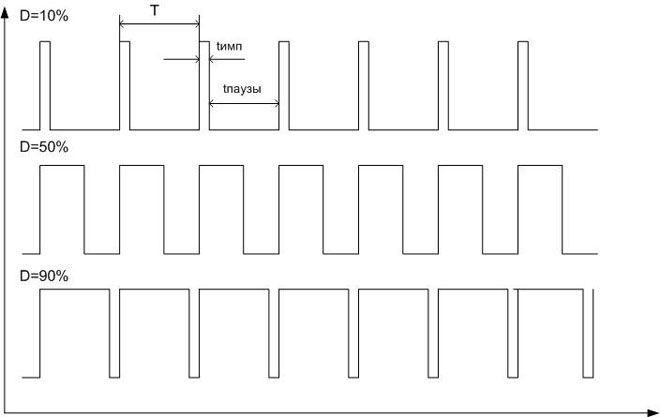
मॉड्युलेशनची विशालता कर्तव्य चक्राद्वारे दर्शविली जाते. नाडी पुनरावृत्ती दर स्थिर असल्याने, कालावधी कालावधी देखील स्थिर असतो (T=1/f). कालावधीमध्ये एक नाडी आणि विराम असतो, ज्याचा कालावधी अनुक्रमे, टीimp आणि टीविराम द्या, जेथे टीimp+tविराम द्या=टी. गुणोत्तर म्हणजे नाडी कालावधी आणि कालावधीचे गुणोत्तर - S=timp/ट.परंतु व्यवहारात व्यस्त मूल्य वापरणे अधिक सोयीचे ठरले - फिल फॅक्टर: D=1/S=T/timp. टक्केवारी म्हणून फिल फॅक्टर व्यक्त करणे अधिक सोयीचे आहे.
PWM आणि PWM मध्ये काय फरक आहे
परदेशी तांत्रिक साहित्यात, पल्स-रुंदी मॉड्युलेशन आणि पल्स-रुंदी नियंत्रण (PWM) मध्ये फरक नाही. रशियन तज्ञ या संकल्पनांमध्ये फरक करण्याचा प्रयत्न करीत आहेत. खरं तर, PWM हा एक प्रकारचा मॉड्युलेशन आहे, म्हणजेच, दुसर्याच्या कृती अंतर्गत वाहक सिग्नलमध्ये बदल, मॉड्युलेटिंग सिग्नल. वाहक सिग्नल माहितीचा वाहक म्हणून कार्य करते आणि मॉड्युलेटिंग सिग्नल ही माहिती सेट करते. आणि पल्स रुंदी नियंत्रण हे PWM द्वारे लोड मोडचे नियमन आहे.
PWM साठी कारणे आणि अर्ज
पल्स-रुंदी मॉड्यूलेशनचे तत्त्व वापरले जाते शक्तिशाली इंडक्शन मोटर्ससाठी स्पीड कंट्रोलर. या प्रकरणात, कमी-पॉवर साइन वेव्ह जनरेटरद्वारे समायोज्य वारंवारता (सिंगल-फेज किंवा थ्री-फेज) चे मॉड्युलेटिंग सिग्नल तयार केले जाते आणि अॅनालॉग पद्धतीने वाहकावर सुपरइम्पोज केले जाते. आउटपुट हे PWM सिग्नल आहे, जे पॉवर डिमांड कीला दिले जाते. मग आपण कमी-पास फिल्टरद्वारे डाळींचा परिणामी क्रम पास करू शकता, जसे की साध्या आरसी-चेन, आणि मूळ साइनसॉइड वेगळे करू शकता. किंवा आपण त्याशिवाय करू शकता - मोटरच्या जडत्वामुळे फिल्टरिंग नैसर्गिकरित्या होईल. अर्थात, वाहक वारंवारता जितकी जास्त असेल तितका आउटपुट सिग्नलचा आकार मूळ साइनसॉइडच्या जवळ असेल.
एक नैसर्गिक प्रश्न उद्भवतो - तुम्ही एकाच वेळी ऑसिलेटर सिग्नल का वाढवू शकत नाही, उदाहरणार्थ, उच्च पॉवर ट्रान्झिस्टर वापरणे? कारण रेग्युलेटिंग एलिमेंट, रेखीय मोडमध्ये कार्यरत, लोड आणि स्विच दरम्यान शक्तीचे पुनर्वितरण करेल. याचा अर्थ मुख्य घटकावर बरीच शक्ती वाया जाते. दुसरीकडे, एक शक्तिशाली नियमन घटक की मोडमध्ये कार्य करत असल्यास (ट्रिनिस्टर, ट्रायक्स, आरजीबीटी ट्रान्झिस्टर), शक्ती कालांतराने वितरीत केली जाते.नुकसान खूपच कमी असेल आणि कार्यक्षमता खूप जास्त असेल.
डिजिटल तंत्रज्ञानामध्ये पल्स रुंदी नियंत्रणासाठी विशेष पर्याय नाही. तेथे सिग्नलचे मोठेपणा स्थिर आहे आणि व्होल्टेज आणि करंट बदलण्याचा एकमेव मार्ग म्हणजे पल्स रुंदी वाहक मोड्युलेट करणे आणि नंतर त्याची सरासरी करणे. म्हणून, PWM चा वापर अशा वस्तूंवर व्होल्टेज आणि विद्युत् प्रवाह नियंत्रित करण्यासाठी केला जातो जे पल्स सिग्नलची सरासरी करू शकतात. सरासरी वेगवेगळ्या प्रकारे होते:
- भार जडत्व करून. अशाप्रकारे, थर्मोइलेक्ट्रिक हीटर्स आणि इनॅन्डेन्सेंट दिवे यांच्या थर्मल जडत्वामुळे नियंत्रण वस्तूंना डाळींच्या दरम्यानच्या विरामांमध्ये लक्षणीयपणे थंड होऊ देत नाही.
- बोधाच्या जडत्वामुळे. LED ला नाडीपासून नाडीकडे क्षीण होण्यास वेळ आहे, परंतु मानवी डोळ्याला हे लक्षात येत नाही आणि ते वेगवेगळ्या तीव्रतेसह सतत चमक म्हणून समजते. एलईडी मॉनिटर्सचे ब्राइटनेस कंट्रोल या तत्त्वावर आधारित आहे. परंतु अनेक शंभर हर्ट्झच्या वारंवारतेसह अगोचर लुकलुकणे अजूनही अस्तित्वात आहे आणि डोळ्यांना थकवा आणतो.
- यांत्रिक जडत्वामुळे. ही मालमत्ता डीसी कलेक्टर मोटर्स नियंत्रित करण्यासाठी वापरली जाते. जर कंट्रोल फ्रिक्वेंसी योग्यरित्या निवडली असेल, तर मोटरला डेड टाइम पॉजमध्ये थांबण्याची वेळ नसते.
म्हणून, PWM चा वापर केला जातो जेथे व्होल्टेजचे सरासरी मूल्य किंवा वर्तमान निर्णायक भूमिका बजावते. नमूद केलेल्या सामान्य प्रकरणांव्यतिरिक्त, PWM पद्धत वेल्डिंग मशीन आणि बॅटरी चार्जर इत्यादींमधील सरासरी प्रवाह नियंत्रित करते.
नैसर्गिक सरासरी काढणे शक्य नसल्यास, बर्याच बाबतीत ही भूमिका आधीच नमूद केलेल्या लो-पास फिल्टरद्वारे गृहीत धरली जाऊ शकते (LPFआरसी-चेनच्या स्वरूपात. व्यावहारिक हेतूंसाठी हे पुरेसे आहे, परंतु हे समजले पाहिजे की विकृतीशिवाय LPF सह PWM पासून मूळ सिग्नल वेगळे करणे अशक्य आहे. शेवटी, पीडब्ल्यूएम स्पेक्ट्रममध्ये अमर्यादपणे मोठ्या संख्येने हार्मोनिक्स असतात, जे अपरिहार्यपणे फिल्टर बँडविड्थमध्ये प्रवेश करतात.म्हणून, पुनर्संचयित साइनसॉइडच्या आकाराबद्दल कोणताही भ्रम करू नका.
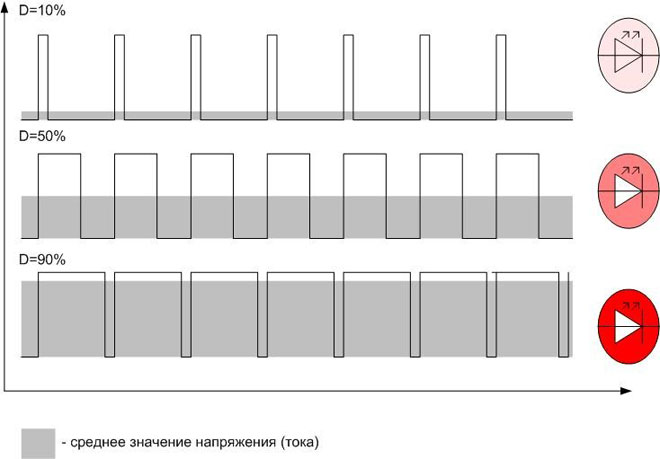
RGB LED चे PWM नियंत्रण अतिशय प्रभावी आणि कार्यक्षम आहे. या उपकरणात तीन p-n जंक्शन आहेत - लाल, निळा, हिरवा. प्रत्येक चॅनेलची ब्राइटनेस स्वतंत्रपणे बदलून, तुम्ही LED ग्लोचा जवळजवळ कोणताही रंग (शुद्ध पांढरा वगळता) मिळवू शकता. PWM सह प्रकाश प्रभाव निर्माण करण्याच्या शक्यता अंतहीन आहेत.
डिजिटल पल्स रुंदी मॉड्युलेटेड सिग्नलचा सर्वात सामान्य अनुप्रयोग म्हणजे लोडमधून वाहणारा सरासरी प्रवाह किंवा व्होल्टेज नियंत्रित करणे. परंतु या प्रकारच्या मॉड्यूलेशनचा गैर-मानक वापर देखील शक्य आहे. हे सर्व डिझाइनरच्या कल्पनेवर अवलंबून असते.
संबंधित लेख: