Sensors vispārīgi ir ierīce, kas pārveido vienu fizikālu lielumu citā, ko var apstrādāt, pārraidīt vai pārveidot. Pirmais parasti ir fizikāls lielums, ko nevar tieši izmērīt (temperatūra, ātrums, pārvietojums utt.), bet otrais ir elektriskais vai optiskais signāls. Sensori, kuru pamatelements ir induktivitātes spole, ieņem savu nišu mērinstrumentu jomā.
Par
Induktīvie sensori un to darbība
Induktīvie sensori pēc to darbības principa ir aktīvi, t. i., tiem nepieciešams ārējs oscilators. Tas ģenerē signālu ar noteiktu frekvenci un amplitūdu induktora spolē.
Strāva, kas plūst caur spolēm, rada magnētisko lauku. Ja magnētiskajā laukā nonāk vadošs objekts, spoles parametri mainās. Atliek tikai noteikt šīs izmaiņas.
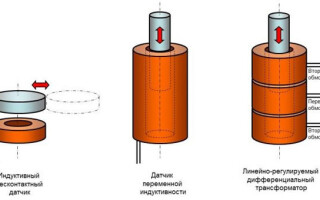
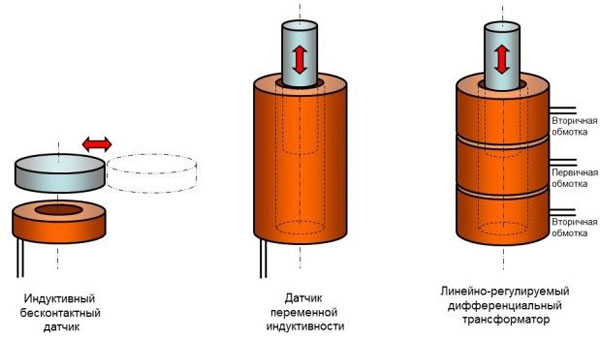
Vienkāršie bezkontakta sensori reaģē uz metāla objektu klātbūtni spoles tuvējā laukā. Tas maina spoles pretestību, un šīs izmaiņas jāpārvērš elektriskā signālā, kas jāpastiprina un/vai jānosaka ar salīdzināšanas ķēdes palīdzību.
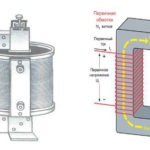
Cits sensoru veids reaģē uz objekta, kas kalpo kā spoles serde, gareniskās pozīcijas izmaiņām. Mainoties objekta pozīcijai, tas ieslīd vai izlīd no spoles, tādējādi mainot tās induktivitāti. Šīs izmaiņas var pārvērst elektriskā signālā un izmērīt. Cits šā sensora variants ir tāds, kad objekts tiek uzspiests uz spoles no ārpuses. Tas izraisa induktivitātes samazināšanos ekranēšanas efekta dēļ.
Cita induktīvā pārvietojuma sensora versija ir lineārais mainīgais diferenciālais transformators (LVDT). Tā ir salikta spole, kas veidota šādā secībā:
- sekundārā spole 1;
- primārais tinums;
- sekundārais tinums 2.
Signāls no ģeneratora tiek pieslēgts primārajam tinumam. Vidējās spoles radītais magnētiskais lauks inducē EML katrā sekundārajā spolē (transformatora princips).transformatora princips). Kodols, kustoties, maina savstarpējo sakabi starp spolēm, mainot elektromotora spēku katrā no tinumiem. Šīs izmaiņas var noteikt ar mērīšanas ķēdes palīdzību. Tā kā serdes garums ir mazāks par kompozītmateriāla spoles kopējo garumu, pēc EMS koeficienta sekundārajos tinumos var nepārprotami noteikt objekta atrašanās vietu.
Rotācijas enkodera pamatā ir tas pats princips - mainās tinumu induktīvā savienojuma induktivitāte. To veido divas koaksiālās spoles. Signāls tiek pieslēgts vienam no tinumiem, un otrā tinuma EML ir atkarīgs no savstarpējā rotācijas leņķa.
No darbības principa ir skaidrs, ka induktīvie sensori neatkarīgi no to konstrukcijas ir bezkontakta sensori. Tie darbojas no attāluma, un tiem nav nepieciešams tiešs kontakts ar kontrolējamo objektu.
Induktīvo sensoru priekšrocības un trūkumi
Induktīvo sensoru priekšrocības galvenokārt ir šādas.
- Izturīga konstrukcija;
- nav kontaktu savienojumu;
- liela izejas jauda, kas samazina trokšņu ietekmi un vienkāršo vadības shēmas;
- augsta jutība;
- Iespēja darboties ar rūpnieciskās frekvences maiņstrāvas padevi.
Galvenie induktīvo sensoru trūkumi ir to izmērs, svars un sarežģītība. Lai uztītu spoles ar nepieciešamajiem parametriem, ir nepieciešams speciāls aprīkojums. Vēl viens trūkums ir tas, ka galvenā oscilatora signāla amplitūdai jābūt precīzi uzturētai. Mainoties signāla amplitūdai, mainās arī jutības diapazons. Tā kā sensori darbojas tikai ar maiņstrāvu, amplitūdas uzturēšana kļūst par noteiktu tehnisku problēmu. Sensoru nav iespējams tieši (vai ar pazeminoša transformatora palīdzību) pieslēgt mājsaimniecības vai rūpnieciskajai elektrotīkla padevei, kur sprieguma amplitūdas vai frekvences svārstības var būt līdz pat 10 % pat normālā darba režīmā, padarot mērījumu precizitāti nepieņemamu.
Mērījumu precizitāti var ietekmēt arī:
- Ārējie magnētiskie lauki (ņemot vērā sensora darbības principu, tā ekranēšana nav iespējama);
- sānu EML indukcijas barošanas un mērīšanas kabeļos.
- ražošanas neprecizitātes;
- Kļūdas sensora raksturojumā;
- Pretrūkumi vai deformācijas zondes montāžas vietā, kas neietekmē vispārējo veiktspēju;
- Precizitātes atkarība no temperatūras (mainās tinuma stieples parametri, tostarp tās pretestība).
Induktivitātes sensoru nespēju reaģēt uz dielektrisko objektu klātbūtni to magnētiskajā laukā var uzskatīt gan par priekšrocību, gan trūkumu. No vienas puses, tas ierobežo pielietojuma diapazonu. No otras puses, tas padara tos nejūtīgus pret netīrumiem, taukiem, smiltīm u. c. uz novērojamajiem objektiem.
Izprotot induktīvo sensoru ierobežojumus un iespējamos ierobežojumus, var racionāli izmantot induktīvo sensoru priekšrocības.
Induktīvo sensoru izmantošanas jomas
Induktīvos tuvuma slēdžus bieži izmanto kā gala slēdžus. Šīs ierīces tiek izmantotas visdažādākajiem lietojumiem:
- drošības sistēmās kā sensori pret nesankcionētu logu un durvju atvēršanu;
- telekontroles sistēmās kā mezglu un mehānismu robežstāvokļa sensori;
- ikdienā durvju, vērtņu, vērtņu slēgtā stāvokļa indikācijas ķēdēs;
- objektu skaitīšanai (piemēram, pārvietojoties pa konveijeru);
- zobratu rotācijas ātruma noteikšanai (katrs zobs, kas šķērso sensoru, rada impulsu);
- Citos gadījumos.

Leņķa stāvokļa kodētājus var izmantot, lai noteiktu vārpstu, zobratu un citu rotējošu vienību rotācijas leņķus, kā arī kā absolūtos kodētājus. Tos var izmantot arī darbgaldos un robotikā kopā ar lineārajiem kodētājiem. Visur, kur ir nepieciešams zināt precīzu mašīnas sastāvdaļu atrašanās vietu.
Induktīvo sensoru praktiskie lietojumi
Praksē induktīvo sensoru konstrukcijas var īstenot dažādos veidos. Visvienkāršākā realizācija un iebūve ir divvadu vienkāršais sensors, kas uzrauga metāla objektu klātbūtni sensora zonā. Šīs ierīces bieži tiek izgatavotas, pamatojoties uz W formas serdi, taču tas nav izšķirošs aspekts. Šo konstrukciju ir vieglāk izgatavot.
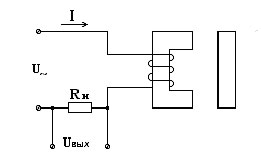
Mainoties spoles pretestībai, mainās strāva ķēdē un sprieguma kritums slodzē. Šīs izmaiņas var noteikt. Problēma ir tā, ka slodzes pretestība kļūst kritiska. Ja tā ir pārāk liela, strāvas izmaiņas, parādoties metāla objektam, būs relatīvi nelielas. Tas samazina sistēmas jutību un imunitāti. Ja tā ir maza, strāva ķēdē būs liela, un būs nepieciešams izturīgāks sensors.
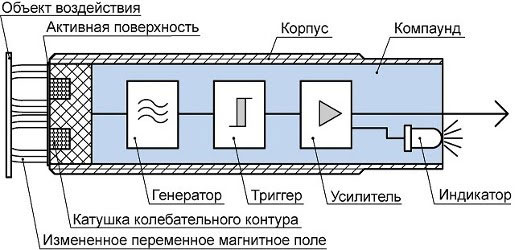
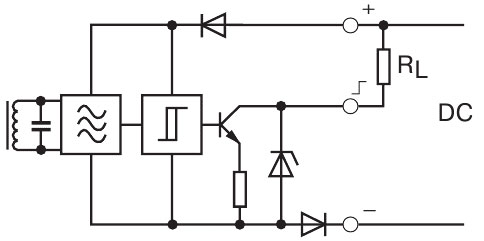
Šā iemesla dēļ ir konstrukcijas, kurās sensora korpusā ir iebūvēta sensora uztveršanas shēma. Ģenerators ģenerē impulsus, kas baro induktora spoles. Kad tiek sasniegts noteikts līmenis, tiek iedarbināts sprūda mehānisms, kas no stāvokļa 0 pārslēdzas uz 1 vai otrādi. Buferu pastiprinātājs palielina signālu jaudas un/vai sprieguma ziņā, ieslēdz (izslēdz) LED un izvada diskrētu signālu ārējai shēmai.
Var ģenerēt izejas signālu:
- ar elektromagnētisku vai cietvielu releji - nulles vai vienota sprieguma līmenis;
- "sausais kontakts" elektromagnētiskais relejs;
- atvērts kolektors tranzistors (n-p-n vai p-n-p struktūras).
Šajā gadījumā sensora savienošanai ir nepieciešami trīs vadi:
- barošanas avots;
- kopējais vads (0 voltu);
- signāla vads.
Šādus sensorus var darbināt arī no līdzstrāvas sprieguma. To induktivitātes impulsus ģenerē iekšējais oscilators.
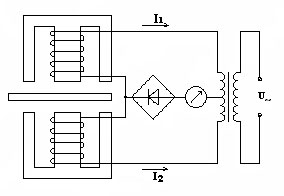
Pozīcijas uzraudzībai tiek izmantoti diferenciālie sensori. Ja kontrolējamais objekts atrodas simetriski attiecībā pret abām spolēm, strāva caur abām spolēm ir vienāda. Ja kāda no spolēm ir novirzīta uz lauka pusi, rodas disbalanss, kopējā strāva vairs nav nulle, un to var noteikt pēc indikatora ar bultiņu skalas vidū. Indikatoru var izmantot, lai noteiktu gan nobīdes lielumu, gan virzienu. Vadības ķēdi var izmantot ciparnīcas vietā, lai nodrošinātu signālu, kad tiek saņemta informācija par stāvokļa izmaiņām, veiktu darbības objekta noregulēšanai, veiktu procesa korekcijas utt.

Sensori, kuru pamatā ir lineāri regulējamu diferenciālo transformatoru princips, tiek ražoti kā kompleksas vienības, kas sastāv no karkasa ar primāro un sekundāro tinumu un stieņa, kas pārvietojas iekšpusē (tas var būt atsperots). Ģeneratora signāla un sekundāro tinumu EMS vadi ir savienoti ar ārpusi. Vadāmo objektu var mehāniski savienot ar kātu. To var izgatavot arī no dielektriska materiāla - mērījumiem ir svarīga tikai kāta pozīcija.
Neraugoties uz dažiem raksturīgiem trūkumiem, induktīvais sensors aizver daudzas jomas, kas saistītas ar objektu bezkontakta noteikšanu telpā. Neraugoties uz nepārtraukto tehnoloģiju attīstību, šāda veida ierīces tuvākajā nākotnē nepazudīs no mērierīču tirgus, jo to darbības pamatā ir fizikas pamatlikumi.
Saistītie raksti: