Diferenciālais proporcionāli integrālais regulators ir ierīce, kas tiek uzstādīta automatizētās sistēmās, lai uzturētu noteiktu maināmu parametru.
No pirmā acu uzmetiena tas ir mulsinoši, taču PID vadību ir iespējams izskaidrot arī manekeniem, t.i.. cilvēkiem, kuri nav īsti pazīstami ar elektroniskajām sistēmām un ierīcēm.
Saturs
Kas ir PID kontrolieris?
PID kontrolieris ir vadības ķēdē integrēta ierīce ar obligātu atgriezenisko saiti. Tā ir paredzēta, lai uzturētu iestatīto līmeni, piemēram, gaisa temperatūru.
Pamatojoties uz datiem, kas saņemti no sensoriem vai raidītājiem, ierīce nodrošina vadības signālu vai izejas signālu kontrolierim. Kontrolieriem ir augsta pārejas perioda precizitāte un veiktspējas kvalitāte.
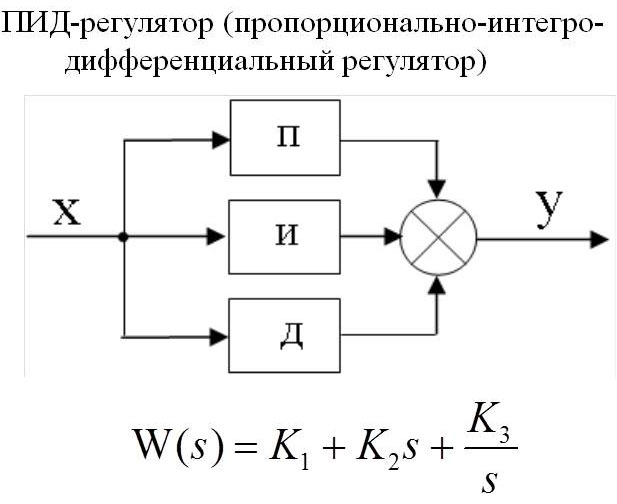
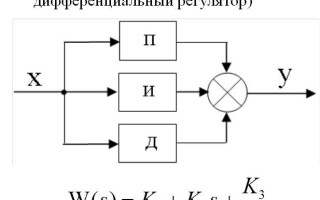
Trīs PID regulatora koeficienti un darbības princips
PID regulatora funkcija ir nodrošināt izejas signālu par jaudu, kas nepieciešama, lai uzturētu kontrolējamo parametru iepriekš noteiktā līmenī. Lai aprēķinātu vērtību, tiek izmantota sarežģīta matemātiska formula, kas ietver 3 koeficientus - proporcionālo, integrālo un diferenciālo.
Pieņemsim tvertni ar ūdeni kā vadības objektu, kurā nepieciešams uzturēt temperatūru noteiktā līmenī, regulējot tvaika vārsta atvēršanas pakāpi.
Proporcionālā komponente parādās brīdī, kad dati nesakrīt ar ievades datiem. Vienkāršoti tas izklausās šādi - tiek ņemta starpība starp faktisko temperatūru un vēlamo temperatūru, reizināta ar regulējamu koeficientu un iegūts izejas signāls, kas jāievada vārstam. Citiem vārdiem sakot, tiklīdz temperatūra ir pazeminājusies, sildīšanas process tiek uzsākts; tiklīdz temperatūra ir paaugstinājusies virs vēlamās, tas tiek izslēgts vai pat atdzesēts.
Tālāk seko integrālā komponente, kas ir paredzēta, lai kompensētu vides vai citu traucējošu faktoru ietekmi uz temperatūras uzturēšanu iestatītajā līmenī. Tā kā vienmēr ir papildu faktori, kas ietekmē kontrolējamās ierīces, skaitlis mainās jau tad, kad tiek saņemti dati proporcionālās komponentes aprēķināšanai. Jo lielāka ārējā ietekme, jo lielākas svārstības skaitlī. Rodas jaudas padeves lēcieni.
Integrālā komponente mēģina atgriezt temperatūras vērtību, pamatojoties uz iepriekšējām vērtībām, ja tā ir mainījusies. Šis process ir sīkāk aprakstīts tālāk pievienotajā videoklipā.
Pēc tam regulatora izejas signāls tiek padots atbilstoši koeficientam, lai paaugstinātu vai pazeminātu temperatūru. Laika gaitā tiek izvēlēta vērtība, kas kompensē ārējos faktorus, un pārspīlējumi izzūd.
Integrāli izmanto, lai novērstu kļūdas, aprēķinot statisko kļūdu. Galvenais šajā procesā ir izvēlēties pareizo koeficientu, pretējā gadījumā kļūda (neatbilstība) ietekmēs arī integrālo komponentu.
Trešā PID komponente ir diferenciālā komponente. Tā ir izstrādāta, lai kompensētu aizkavēšanās ietekmi, kas rodas starp ietekmi uz sistēmu un atgriezenisko saiti. Proporcionālais kontrolieris piegādā enerģiju, līdz temperatūra sasniedz pareizo vērtību, taču, nododot informāciju ierīcei, vienmēr rodas kļūdas, jo īpaši, ja vērtības ir lielas. Tas var izraisīt pārkaršanu. Diferenciālis paredz novirzes, ko izraisa kavēšanās vai vides ietekme, un iepriekš samazina piegādāto jaudu.
PID regulatora iestatīšana
PID kontrolieris tiek noregulēts, izmantojot 2 metodes:
- Sintēze ietver parametru aprēķināšanu, pamatojoties uz sistēmas modeli. Šāda regulēšana ir precīza, taču tai nepieciešamas padziļinātas zināšanas par automātiskās vadības teoriju. To var izdarīt tikai inženieri un zinātnieki. Tā kā ir nepieciešams ņemt plūsmas raksturlielumus un veikt daudz aprēķinu.
- Manuālā metode ir balstīta uz izmēģinājumiem un kļūdām. Tas tiek darīts, izmantojot datus no jau esošas sistēmas un veicot dažas korekcijas vienam vai vairākiem regulatora koeficientiem. Pēc ieslēgšanas un galīgā rezultāta novērošanas parametri tiek mainīti vēlamajā virzienā. Un tā tālāk, līdz tiek sasniegts vēlamais veiktspējas līmenis.
Teorētiskās analīzes un regulēšanas metodes reti tiek izmantotas praksē, jo trūkst zināšanu par vadības objekta raksturlielumiem un iespējamu traucējošu ietekmju daudzveidību. Biežāk tiek izmantotas eksperimentālas metodes, kas balstītas uz sistēmas novērošanu.
Mūsdienu automatizētie procesi tiek īstenoti kā specializēti moduļi, kurus kontrolē programmatūra, lai pielāgotu regulatoru koeficientus.
PID regulatora mērķis
PID kontrolieris ir paredzēts, lai uzturētu noteiktu vērtību - temperatūru, spiedienu, līmeni tvertnē, plūsmu cauruļvadā, kaut kā koncentrāciju utt. - vajadzīgajā līmenī, mainot vadības darbību uz izpildmehānismiem, piemēram, automātiskajiem vadības vārstiem, izmantojot proporcionālas, integrējošas, diferencējošas vērtības tās iestatīšanai.
Lietojumprogrammas mērķis ir iegūt precīzu vadības signālu, ar kuru var kontrolēt lielas iekārtas un pat spēkstaciju reaktorus.
Temperatūras kontroles shēmas piemērs
PID kontrolierus bieži izmanto temperatūras regulēšanā, kā piemēru šim automātiskajam procesam ņemsim vienkāršu piemēru - ūdens sildīšanu tvertnē.
Tvertne ir piepildīta ar šķidrumu, kas jāuzsilda līdz vajadzīgajai temperatūrai un jāuztur vēlamajā līmenī. Tvertnes iekšpusē ir temperatūras sensors - termopara. termopāri vai pretestības termometrs un ir tieši savienots ar PID kontrolieri.
Mēs piegādāsim tvaiku, lai uzsildītu šķidrumu, kā parādīts attēlā zemāk, ar automātisko regulēšanas vārstu. Vārsts pats saņem signālu no kontroliera. Operators PID kontrolierī ievada temperatūras iestatījuma vērtību, kas jāuztur tvertnē.

Ja regulatora koeficienti ir nepareizi, ūdens temperatūra lēkās un vārsts būs pilnībā atvērts un pilnībā aizvērts. Šādā gadījumā ir jāaprēķina un atkārtoti jāievada PID koeficienti. Ja tas tiek darīts pareizi, pēc neilga laika sistēma izlīdzināsies un temperatūra tvertnē tiks uzturēta iestatītajā temperatūrā, vadības vārsta atvēršanas pakāpei atrodoties vidējā stāvoklī.
Saistītie raksti: