Un régulateur proportionnel-intégral différentiel est un dispositif installé dans les systèmes automatisés pour maintenir un paramètre donné capable de changer.
C'est déroutant à première vue, mais il est possible d'expliquer la commande PID pour les nuls également, c'est à dire les personnes qui ne sont pas tout à fait familiarisées avec les systèmes et appareils électroniques.
Contenu
Qu'est-ce qu'un contrôleur PID ?
Un contrôleur PID est un dispositif intégré dans le circuit de contrôle avec une rétroaction obligatoire. Il est conçu pour maintenir les niveaux des points de consigne, par exemple la température de l'air.
Le dispositif fournit un signal de commande ou un signal de sortie au contrôleur, sur la base des données reçues des capteurs ou des émetteurs. Les contrôleurs ont une précision transitoire et une qualité de performance élevées.
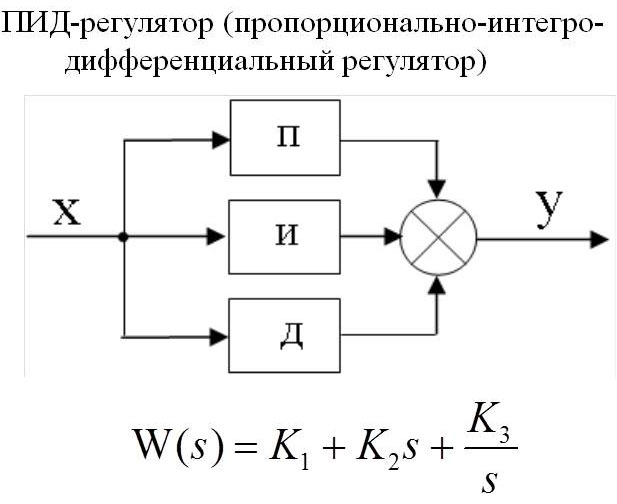
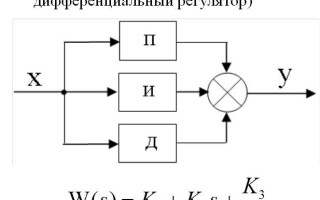
Trois coefficients du régulateur PID et principe de fonctionnement
La fonction du contrôleur PID est de fournir un signal de sortie de la puissance nécessaire pour maintenir le paramètre contrôlé à un niveau prédéterminé. Pour calculer la valeur, une formule mathématique complexe est utilisée, qui comprend 3 coefficients - proportionnel, intégral, différentiel.
Prenons comme objet de contrôle un réservoir contenant de l'eau, dans lequel il est nécessaire de maintenir la température à un niveau donné en régulant le degré d'ouverture d'une vanne à vapeur.
La composante proportionnelle apparaît au moment de l'inadéquation avec les données d'entrée. En termes simples, cela ressemble à ceci : la différence entre la température réelle et la température souhaitée est prise, multipliée par un coefficient réglable et le signal de sortie à appliquer à la vanne est obtenu. En d'autres termes, dès que la température a baissé, le processus de chauffage est lancé ; dès qu'elle est remontée au-dessus de la température souhaitée, il est arrêté, voire refroidi.
Vient ensuite le composant intégral, qui est conçu pour compenser les effets de l'environnement ou d'autres influences perturbatrices sur le maintien de notre température au point de consigne. Comme il y a toujours des facteurs supplémentaires qui affectent les appareils contrôlés, la figure est déjà en train de changer lorsque les données pour le calcul de la composante proportionnelle arrivent. Et plus les influences extérieures sont importantes, plus les fluctuations du chiffre sont grandes. Des sauts de puissance se produisent.
Le composant intégral tente de renvoyer la valeur de la température sur la base des valeurs antérieures, si elle a changé. Le processus est décrit plus en détail dans la vidéo ci-dessous.
Ensuite, le signal de sortie du régulateur est alimenté en fonction du coefficient pour augmenter ou diminuer la température. Avec le temps, on choisit une valeur qui compense les facteurs externes, et les surcharges disparaissent.
L'intégrale est utilisée pour éliminer les erreurs en calculant l'erreur statique. L'essentiel dans ce processus est de sélectionner le bon coefficient, sinon l'erreur (mismatch) affectera également la composante intégrale.
La troisième composante PID est la composante différentielle. Il est conçu pour compenser les effets des délais qui se produisent entre l'impact sur le système et le retour d'information. Le régulateur proportionnel fournit de l'énergie jusqu'à ce que la température atteigne la valeur correcte, mais il y a toujours des erreurs lors de la transmission des informations au dispositif, surtout avec des valeurs importantes. Cela peut entraîner une surchauffe. Le différentiel anticipe les déviations causées par des retards ou des influences environnementales et réduit la puissance fournie à l'avance.
Configuration d'un contrôleur PID
Le régulateur PID est réglé à l'aide de deux méthodes :
- La synthèse consiste à calculer les paramètres sur la base du modèle du système. Un tel réglage est précis, mais nécessite une connaissance approfondie de la théorie de la commande automatique. Cela ne peut être fait que par des ingénieurs et des scientifiques. Comme il est nécessaire de prendre les caractéristiques de l'écoulement et de faire beaucoup de calculs.
- La méthode manuelle est basée sur des essais et des erreurs. Il s'agit de prendre les données d'un système déjà existant et d'apporter quelques ajustements à un ou plusieurs coefficients du régulateur. Après la mise en marche et l'observation du résultat final, les paramètres sont modifiés dans le sens souhaité. Et ainsi de suite, jusqu'à ce que le niveau de performance souhaité soit atteint.
L'analyse théorique et les méthodes de réglage sont rarement utilisées dans la pratique en raison du manque de connaissance des caractéristiques de l'objet de contrôle et d'une variété d'influences perturbatrices possibles. Les méthodes expérimentales basées sur l'observation du système sont plus courantes.
Les processus automatisés modernes sont mis en œuvre sous forme de modules spécialisés sous le contrôle d'un logiciel permettant d'ajuster les coefficients de régulation.
Objectif du contrôleur PID
Le contrôleur PID est conçu pour maintenir une certaine valeur - température, pression, niveau dans un réservoir, débit dans une canalisation, concentration de quelque chose, etc. - à un niveau requis en modifiant l'action de contrôle sur les actionneurs, tels que les vannes de contrôle automatiques, en utilisant des valeurs proportionnelles, intégrantes, différentielles pour son réglage.
Le but de l'application est d'obtenir un signal de commande précis, capable de contrôler de grandes installations et même les réacteurs de centrales électriques.
Exemple d'un circuit de régulation de température
Les régulateurs PID sont souvent utilisés dans la régulation de la température. Prenons l'exemple simple du chauffage de l'eau dans un réservoir pour illustrer ce processus automatique.
Le réservoir est rempli de liquide qui doit être chauffé à la température souhaitée et maintenu au niveau souhaité. Il y a un capteur de température à l'intérieur du réservoir - un thermocouple. thermocouple ou thermomètre à résistance et est directement connecté au contrôleur PID.
Nous fournirons de la vapeur pour chauffer le liquide, comme le montre l'illustration ci-dessous, avec la vanne de régulation automatique. La vanne elle-même reçoit un signal du contrôleur. L'opérateur introduit dans le régulateur PID la valeur de consigne de la température à maintenir dans le réservoir.

Si les coefficients du contrôleur sont incorrects, la température de l'eau sautera et la vanne sera complètement ouverte et complètement fermée. Dans ce cas, les coefficients PID doivent être calculés et réintroduits. Si cela est fait correctement, après une courte période de temps, le système s'égalisera et la température du réservoir sera maintenue à la température de consigne, avec le degré d'ouverture de la vanne de régulation en position médiane.
Articles connexes :