En termes généraux, un capteur est un dispositif qui convertit une quantité physique en une autre qui peut être traitée, transmise ou convertie. Le premier est généralement une quantité physique qui ne peut être mesurée directement (température, vitesse, déplacement, etc.), tandis que le second est un signal électrique ou optique. Les capteurs, dont l'élément de base est la bobine d'inductance, occupent leur propre niche dans le domaine des instruments de mesure.
À propos de
Comment les capteurs inductifs sont conçus et comment ils fonctionnent
Les capteurs inductifs, de par leur principe de fonctionnement, sont actifs, c'est-à-dire qu'ils nécessitent un oscillateur externe. Cela génère un signal avec une fréquence et une amplitude définies dans la bobine d'induction.
Le courant qui circule dans les bobines crée un champ magnétique. Si un objet conducteur entre dans le champ magnétique, les paramètres de la bobine changent. Il ne reste plus qu'à détecter ce changement.
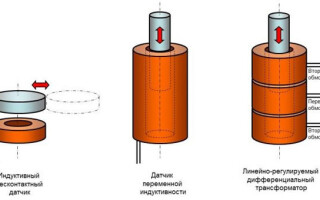
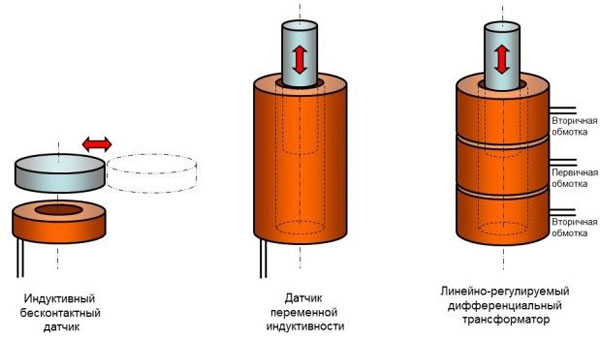
Les capteurs simples sans contact réagissent à la présence d'objets métalliques dans le champ proche de la bobine. Cela modifie l'impédance de la bobine, cette modification doit être convertie en un signal électrique, amplifié et/ou détecté par un circuit de comparaison.
Un autre type de capteur répond à un changement de la position longitudinale d'un objet qui sert de noyau à la bobine. Lorsque la position de l'objet change, il glisse dans ou hors de la bobine, modifiant ainsi son inductance. Ce changement peut être converti en un signal électrique et mesuré. Une autre version de ce capteur consiste à pousser un objet sur la bobine depuis l'extérieur. Cela entraîne une réduction de l'inductance due à l'effet de blindage.
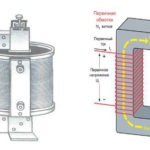
Une autre version du capteur de déplacement inductif est le transformateur différentiel variable linéaire (LVDT). Il s'agit d'une bobine composée réalisée dans l'ordre suivant :
- bobine secondaire 1 ;
- enroulement primaire ;
- enroulement secondaire 2.
Le signal du générateur est appliqué à l'enroulement primaire. Le champ magnétique créé par la bobine centrale induit une force électromagnétique dans chacune des bobines secondaires (principe du transformateur).principe du transformateur). Le noyau, en se déplaçant, modifie le couplage mutuel entre les bobines, modifiant ainsi la force électromotrice dans chacun des enroulements. Ce changement peut être détecté par le circuit de mesure. Comme la longueur du noyau est inférieure à la longueur totale de la bobine composite, le rapport de la force électromotrice dans les enroulements secondaires peut déterminer sans ambiguïté la position de l'objet.
Un codeur rotatif est basé sur le même principe de modification du couplage inductif entre les enroulements. Il se compose de deux bobines coaxiales. Le signal est appliqué à l'un des enroulements, la force électromotrice dans le second enroulement dépend de l'angle de rotation mutuel.
Il est évident, d'après le principe de fonctionnement, que les capteurs inductifs, quelle que soit leur conception, sont des capteurs sans contact. Ils fonctionnent à distance et ne nécessitent pas de contact direct avec l'objet à surveiller.
Avantages et inconvénients des capteurs inductifs
Les avantages des capteurs inductifs sont principalement
- Construction robuste ;
- aucune connexion de contact ;
- une puissance de sortie élevée, ce qui réduit l'influence du bruit et simplifie le circuit de commande ;
- haute sensibilité ;
- Possibilité de fonctionnement avec une alimentation en courant alternatif de fréquence industrielle.
Les principaux inconvénients des capteurs inductifs sont leur taille, leur poids et leur complexité. Un équipement spécial est nécessaire pour enrouler les bobines avec les paramètres requis. Un autre inconvénient est que l'amplitude du signal provenant de l'oscillateur maître doit être maintenue avec précision. La plage de sensibilité varie également en fonction de l'amplitude du signal. Comme les capteurs ne fonctionnent qu'en courant alternatif, le maintien de l'amplitude devient un problème technique certain. Il n'est pas possible de connecter le capteur directement (ou via un transformateur abaisseur) à une alimentation secteur domestique ou industrielle, où les variations de tension en amplitude ou en fréquence peuvent atteindre 10 %, même en fonctionnement normal, rendant la précision de la mesure inacceptable.
La précision de la mesure peut également être affectée par :
- Champs magnétiques externes (le blindage du capteur n'est pas possible compte tenu de son principe de fonctionnement) ;
- les inductions latérales de CEM dans les câbles d'alimentation et de mesure
- des inexactitudes de fabrication ;
- Erreurs dans la caractéristique du capteur ;
- Contrecoups ou déformations à l'emplacement de montage de la sonde qui n'affectent pas les performances générales ;
- La précision dépend de la température (les paramètres du fil de bobinage, y compris sa résistance, changent).
L'incapacité des capteurs à inductance à réagir à la présence d'objets diélectriques dans leur champ magnétique peut être considérée à la fois comme un avantage et un inconvénient. D'une part, cela limite le champ d'application. D'autre part, cela les rend insensibles à la saleté, à la graisse, au sable, etc. sur les objets surveillés.
En comprenant les limites et les éventuelles limitations des capteurs inductifs, il est possible d'exploiter rationnellement les avantages de ces derniers.
Domaines d'application des capteurs inductifs
Les détecteurs de proximité inductifs sont souvent utilisés comme interrupteurs de fin de course. Ces dispositifs sont utilisés pour une grande variété d'applications :
- dans les systèmes de sécurité comme capteurs d'ouverture non autorisée des fenêtres et des portes ;
- dans les systèmes de télécontrôle comme capteurs de position limite pour les assemblages et les mécanismes ;
- dans la vie quotidienne dans les circuits d'indication de la position fermée des portes, des volets ;
- pour compter les objets (par exemple, ceux qui se déplacent sur un tapis roulant) ;
- pour déterminer la vitesse de rotation des engrenages (chaque dent passant devant le capteur génère une impulsion) ;
- Dans d'autres situations.

Les codeurs de position angulaire peuvent être utilisés pour déterminer les angles de rotation des arbres, des engrenages et d'autres unités rotatives, ainsi que comme codeurs absolus. Ils peuvent également être utilisés dans les applications de machines-outils et de robotique aux côtés des codeurs linéaires. Partout où il est nécessaire de connaître la position exacte des composants de la machine.
Applications pratiques pour les capteurs inductifs
En pratique, la conception des capteurs inductifs peut être mise en œuvre de différentes manières. La mise en œuvre et l'incorporation les plus simples sont celles du capteur unique à deux fils, qui surveille la présence d'objets métalliques dans sa zone de détection. Ces appareils sont souvent fabriqués sur la base d'un noyau en W, mais ce n'est pas un point crucial. Cette conception est plus facile à fabriquer.
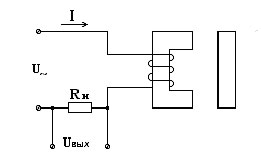
Lorsque la résistance de la bobine change, le courant dans le circuit et la chute de tension aux bornes de la charge changent. Ces changements peuvent être détectés. Le problème est que la résistance de la charge devient critique. Si elle est trop grande, la variation du courant lors de l'apparition d'un objet métallique sera relativement faible. Cela réduit la sensibilité et l'immunité du système. Si elle est petite, le courant dans le circuit sera élevé et un capteur plus résistant sera nécessaire.
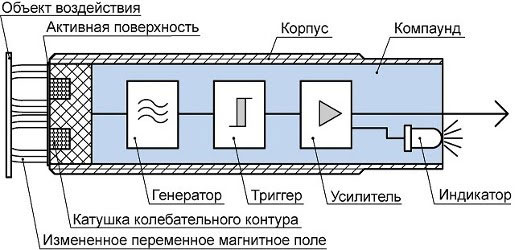
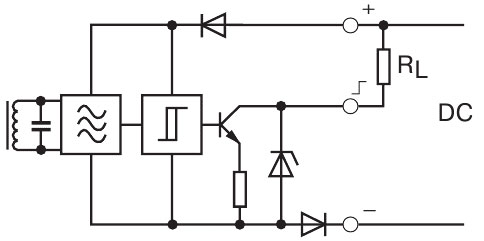
C'est pourquoi, dans certains modèles, le circuit de détection est intégré au boîtier du capteur. Un générateur génère des impulsions qui alimentent la bobine d'induction. Lorsqu'un certain niveau est atteint, un déclencheur est actionné, faisant passer de l'état 0 à l'état 1 ou vice versa. Un amplificateur tampon amplifie le signal en termes de puissance et/ou de tension, allume (éteint) la LED et délivre un signal discret pour le circuit externe.
Le signal de sortie peut être généré :
- au moyen d'un dispositif électromagnétique ou relais statique - niveau de tension nul ou unitaire ;
- "contact sec" relais électromagnétique;
- collecteur ouvert transistor (structures n-p-n ou p-n-p).
Dans ce cas, trois fils sont nécessaires pour connecter le capteur :
- alimentation électrique ;
- fil commun (0 volt) ;
- fil de signalisation.
Ces capteurs peuvent également être alimentés par une tension continue. Leurs impulsions d'inductance sont générées par un oscillateur interne.
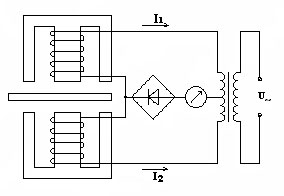
Les capteurs différentiels sont utilisés pour le contrôle de la position. Si l'objet à surveiller est symétrique par rapport aux deux bobines, le courant qui traverse les deux bobines est le même. Si l'une des bobines est polarisée vers le champ, il y a déséquilibre, le courant total n'est plus nul, ce qui peut être détecté par un indicateur avec une flèche au milieu de l'échelle. L'indicateur peut être utilisé pour déterminer à la fois la magnitude du décalage et sa direction. Un circuit de commande peut être utilisé à la place d'un comparateur pour fournir un signal lorsqu'il reçoit des informations sur un changement de position, prendre des mesures pour aligner l'objet, apporter des corrections au processus, etc.

Les capteurs basés sur le principe des transformateurs différentiels à régulation linéaire sont fabriqués sous forme de constructions complètes, composées d'un cadre avec des enroulements primaires et secondaires et d'une tige qui se déplace à l'intérieur (elle peut être chargée par un ressort). Les fils pour le signal du générateur et la force électromotrice des enroulements secondaires sont connectés à l'extérieur. L'objet à contrôler peut être relié mécaniquement à la tige. Il peut également être fabriqué en matériau diélectrique - seule la position de la tige compte pour la mesure.
Malgré certains inconvénients inhérents, le capteur inductif ferme de nombreux domaines liés à la détection sans contact d'objets dans l'espace. Malgré l'évolution constante de la technologie, ce type d'appareil ne quittera pas le marché des appareils de mesure dans un avenir prévisible, car son action est basée sur les lois fondamentales de la physique.
Articles connexes :