Andur üldises tähenduses on seade, mis muudab ühe füüsilise suuruse teiseks, mis sobib töötlemiseks, edastamiseks või järgnevaks muundamiseks. Reeglina on esimene füüsikaline suurus, mida ei saa otseselt mõõta (temperatuur, kiirus, nihe jne), ja teine on elektriline või optiline signaal. Andurid, mille põhielement on mähis, hõivavad mõõteriistade valdkonnas oma niši.
Sisu
Kuidas induktiivsed andurid on konstrueeritud ja kuidas need töötavad
Induktiivsed andurid on oma tööpõhimõttelt aktiivsed andurid, st nad vajavad välist ostsillaatorit. See varustab induktiivpooli etteantud sageduse ja amplituudiga signaaliga.
Mähiste kaudu voolav vool tekitab magnetvälja. Kui juhtiv objekt satub magnetvälja, muutuvad pooli parameetrid. Jääb vaid see muutus avastada.
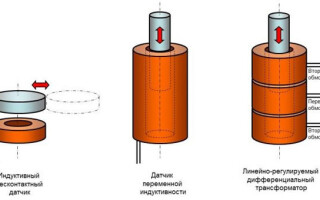
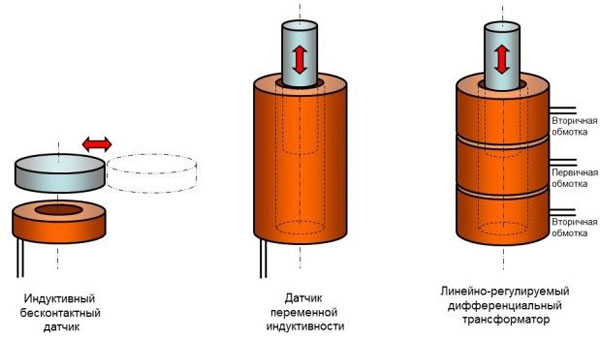
Lihtsad mittekontaktsed andurid reageerivad metallesemete ilmumisele mähise lähitsoonis. See muudab mähise impedantsi, see muutus tuleb teisendada elektrisignaaliks, võimendada ja (või) fikseerida võrdlusahela abil läve läbimine.
Teist tüüpi andurid reageerivad objekti pikisuunalise asendi muutustele, mis toimib mähise südamikuna. Kui objekti asukoht muutub, libiseb see mähisesse sisse või välja, muutes seeläbi oma induktiivsust. Selle muutuse saab teisendada elektrisignaaliks ja mõõta. Selle anduri teine versioon on see, kui objekt surutakse väljastpoolt mähisele. See põhjustab ekraaniefekti tõttu induktiivsuse vähenemist.
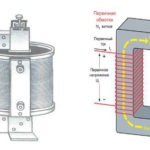
Teine induktiivse nihkeanduri variant on lineaarne muutuv diferentsiaaltransformer (LVDT). See on liitmähis, mis on valmistatud järgmises järjekorras:
- sekundaarmähis 1;
- primaarmähis;
- sekundaarmähis 2.
Generaatori signaal suunatakse primaarmähisele. Keskmise mähise tekitatud magnetväli indutseerib EMF-i igas sekundaarses (trafo põhimõte). Südamik muudab liikumise ajal vastastikust sidet mähiste vahel, muutes elektromotoorjõudu igas mähises. Seda muutust saab tuvastada mõõteahela abil. Kuna südamiku pikkus on väiksem kui liitmähise kogupikkus, võib sekundaarmähiste EMF-i suhe üheselt määrata objekti asukoha.
Sama põhimõtet - mähiste vahelise induktiivse sidumise muutmine - kasutatakse pöörlemisanduri ehitamisel. See koosneb kahest koaksiaalpoolist. Signaal suunatakse ühele mähisele, teises mähis olev EMF sõltub vastastikusest pöördenurgast.
Tööpõhimõttest on ilmne, et induktiivsed andurid on olenemata nende konstruktsioonist mittekontaktsed andurid. Need töötavad eemalt ega vaja otsest kontakti jälgitava objektiga.
Induktiivandurite eelised ja puudused
Induktiivsete andurite eelised hõlmavad peamiselt järgmist:
- disaini usaldusväärsus;
- kontaktühenduste puudumine;
- suur väljundvõimsus, mis vähendab müra mõju ja lihtsustab juhtimisahelat;
- kõrge tundlikkus;
- Töötamise võimalus tööstusliku sagedusega vahelduvpingeallikatest.
Induktiivandurite peamine puudus on nende suurus, kaal ja valmistamise keerukus. Määratud parameetritega mähiste mähimiseks on vaja spetsiaalset varustust. Veel üks puudus on vajadus säilitada täpselt põhiostsillaatori signaali amplituudi. Kui see muutub, muutub ka tundlikkuse vahemik. Kuna andurid töötavad ainult vahelduvvooluga, muutub amplituudi hoidmine kindlaks tehniliseks probleemiks. Otse (või läbi astmelise trafo) olme- või tööstusvõrku ei ole võimalik andurit ühendada - selles võivad pinge kõikumised amplituudis või sageduses ulatuda isegi tavarežiimis 10% -ni, mis muudab mõõtmise täpsuse vastuvõetamatuks.
Samuti võivad mõõtmise täpsust mõjutada:
- kõrvalised magnetväljad (anduri varjestamine ei ole selle tööpõhimõtte alusel võimalik);
- Välised EMF-i induktsioonid toite- ja mõõtekaablites;
- tootmisvead;
- Anduri karakteristiku ebatäpsus;
- Anduri paigalduskohas esinevad lõtkud või deformatsioonid, mis ei mõjuta üldist jõudlust;
- täpsuse sõltuvus temperatuurist (mähise traadi parameetrid muutuvad, sealhulgas selle takistus).
Induktiivsusandurite võimetust reageerida dielektriliste objektide ilmumisele nende magnetväljas võib liigitada nii eeliseks kui ka puuduseks. Ühest küljest piirab see nende kohaldamisala. Teisest küljest muudab see need tundetuks jälgitavatel objektidel oleva mustuse, rasva, liiva jms suhtes.
Induktiivandurite puuduste ja võimalike piirangute tundmine võimaldab nende eeliseid ratsionaalselt kasutada.
Induktiivandurite kasutusvaldkonnad
Induktiivseid lähedusandureid kasutatakse sageli piirlülititena. Need seadmed on muutunud tavaliseks:
- turvasüsteemides akende ja uste lubamatu avamise andurina;
- telemehaanikasüsteemides sõlmede ja mehhanismide lõppasendi andurina;
- igapäevaelus uste, tiibade suletud asendi näitamise skeemides;
- objektide loendamiseks (nt konveieril liikumine);
- hammasrataste pöörlemiskiiruse määramiseks (iga andurist mööduv hammas tekitab impulsi);
- Muudes olukordades.

Nurgaasendi koodereid saab kasutada võllide, hammasrataste ja muude pöörlevate sõlmede pöördenurkade määramiseks ning ka absoluutkooderidena. Neid saab kasutada ka tööpinkides ja robootikarakendustes koos lineaarsete kodeerijatega. Kus iganes on vaja täpselt teada masinaosade asukohta.
Induktiivandurite praktilised teostusnäited
Praktikas saab induktiivseid andureid rakendada mitmel viisil. Lihtsaim konstruktsioon ja integratsioon on kahejuhtmeline üheandur, mis jälgib metallesemete olemasolu oma tuvastusalas. Sellised seadmed on sageli valmistatud W-kujulise südamiku baasil, kuid see on põhimõttetu punkt. Sellist disaini on lihtsam valmistada.
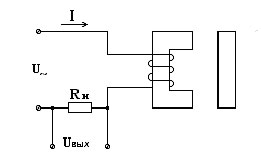
Kui muudate mähise takistust, muutub voolutugevus vooluringis ja pingelangus koormusel. Neid muutusi saab tuvastada. Probleem on selles, et koormustakistus muutub kriitiliseks. Kui see on liiga suur, on voolu muutus metalleseme ilmumisel suhteliselt väike. See vähendab süsteemi tundlikkust ja immuunsust. Kui see on väike, on vooluring voolutugevus suur ja vaja on vastupidavamat andurit.
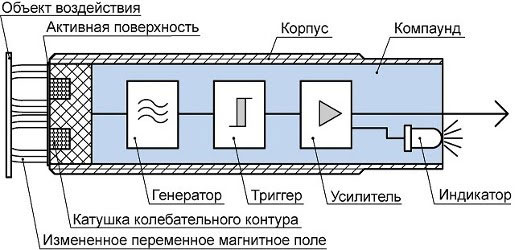
Seetõttu on olemas konstruktsioonid, mille mõõteahel on sisseehitatud anduri korpusesse. Generaator genereerib impulsse, mis toidavad induktiivpooli. Kui teatud tase on saavutatud, käivitatakse päästik, mis liigub 0-lt 1-le või vastupidi.Puhvervõimendi võimendab signaali võimsuse ja/või pinge abil, valgustab (kustutab) LED-i ja väljastab diskreetse signaali välisesse vooluringi.
Väljundsignaali saab genereerida:
- elektromagnetilise või pooljuhtrelee - null- või ühikuline pingetase;
- "kuiv kontakt" elektromagnetrelee;
- avatud koguja transistor (n-p-n või p-n-p struktuur).
Sel juhul vajate anduri ühendamiseks kolme juhtmestikku:
- võimsus;
- ühine juhe (0 volti);
- signaali juhe.
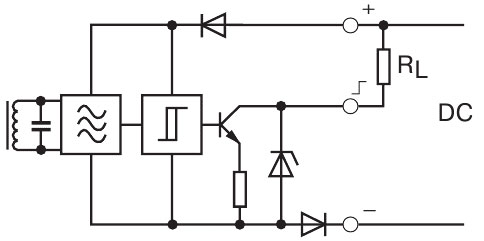
Selliseid andureid saab toita ka alalispingega. Nende induktiivsusimpulsid genereeritakse sisemise ostsillaatori abil.
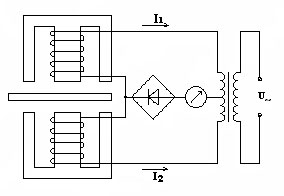
Asendi jälgimiseks kasutatakse diferentsiaalandureid. Kui jälgitav objekt on sümmeetriliselt mõlema pooli suhtes, on neid läbiv vool sama. Kui kumbagi pooli nihutada välja poole, tekib tasakaalutus, koguvool lakkab olemast nulliga, mida saab tuvastada skaala keskel oleva noolega indikaatoriga. Indikaatori abil saab määrata nii nihke suurust kui ka selle suunda. Nooleseadme asemel on võimalik kasutada juhtahelat, mis asukohamuutuse kohta infot saades annab signaali, võtab meetmeid objekti joondamiseks, korrigeerib tehnoloogilist protsessi jne.

Lineaarregulatsiooniga diferentsiaaltrafode põhimõttel valmistatud andureid toodetakse terviklike konstruktsioonidena, mis kujutavad endast primaar- ja sekundaarmähisega karkassi ning sees liikuvat varda (võib olla vedruga). Seal on juhtmed generaatori signaali ja EMF-i eraldamiseks sekundaarmähistest. Kontrollitavat objekti saab mehaaniliselt varre külge ühendada. See võib olla ka dielektrikust – mõõtmisel on oluline ainult varda asend.
Vaatamata teatud loomupärastele puudustele sulgeb induktiivne andur palju alasid, mis on seotud objektide kontaktivaba tuvastamisega ruumis. Vaatamata tehnoloogia pidevale arengule ei lahku seda tüüpi seadmed lähitulevikus mõõteseadmete turult, sest nende tegevus põhineb füüsika alusseadustel.
Seotud artiklid: