Diferentsiaalproportsionaal-integraalregulaator on seade, mis paigaldatakse automatiseeritud süsteemidesse, et säilitada antud parameetri muutmisvõime.
Esmapilgul on see segane, kuid saate selgitada PID reguleerimist ja mannekeenide jaoks, st. inimesed, kes pole elektroonikasüsteemide ja -seadmetega päris kursis.
Sisu
Mis on PID regulaator?
PID-regulaator on kohustusliku tagasisidega juhtimisahelasse sisseehitatud seade. See on ette nähtud seadeväärtuste, näiteks õhutemperatuuri, seatud tasemete säilitamiseks.
Seade saadab anduritelt või anduritelt saadud andmete põhjal juhtsignaali või väljundsignaali juhtseadmele. Kontrolleritel on kõrge siirdetäpsus ja seatud ülesande täitmise kvaliteet.
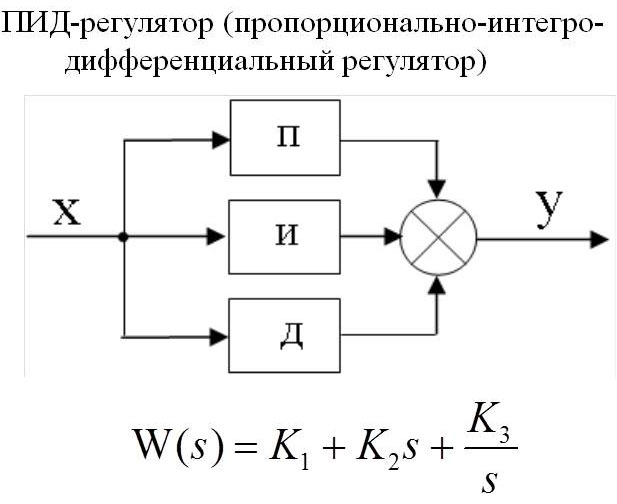
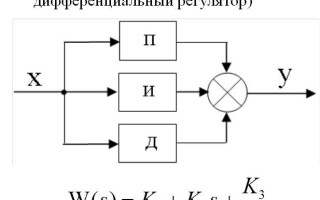
PID-regulaatori kolm koefitsienti ja tööpõhimõte
PID-kontrolleri töö eesmärk on anda väljundsignaali võimsusega, mis on vajalik reguleeritud parameetri hoidmiseks etteantud tasemel. Indeksi arvutamiseks kasutage keerulist matemaatilist valemit, mis sisaldab 3 koefitsienti - proportsionaalne, integraal, diferentsiaal.
Võtame reguleerimisobjektiks veepaagi, milles on vaja hoida temperatuuri etteantud tasemel, reguleerides klapi avanemisastet auruga.
Proportsionaalne komponent kuvatakse sisendandmetega mittevastavuse hetkel. Lihtsamalt öeldes kõlab see nii - võetakse tegeliku temperatuuri ja soovitud temperatuuri erinevus, korrutatakse reguleeritava koefitsiendiga ja saadakse väljundsignaal, mis tuleks ventiilile rakendada. St. niipea kui kraadid on langenud, käivitatakse kütteprotsess, niipea kui temperatuur on tõusnud üle soovitud taseme, lülitatakse see välja või isegi jahutatakse.
Järgmiseks tuleb lahutamatu komponent, mis on loodud kompenseerima keskkonna mõju või muid häirivaid mõjusid meie temperatuuri hoidmisel seadepunktis. Kuna juhitavaid seadmeid mõjutavad alati täiendavad tegurid, siis proportsionaalse komponendi arvutamiseks vajalike andmete saabumisel on arv juba muutumas. Ja mida suuremad on välismõjud, seda suuremad on kõikumised joonisel. Toiteallikas on naelu.
Integraalne komponent proovib tagastada temperatuuri väärtust varasemate väärtuste põhjal, kui see on muutunud. Protsessi kirjeldatakse üksikasjalikumalt allolevas videos.
Seejärel juhitakse regulaatori väljund vastavalt koefitsiendile temperatuuri tõstmiseks või langetamiseks. Aja jooksul valitakse väärtus, mis kompenseerib väliseid tegureid, ja hüpped kaovad.
Integraali kasutatakse vigade kõrvaldamiseks staatilise vea arvutamise teel. Peamine selles protsessis on valida õige koefitsient, vastasel juhul mõjutab viga (mittevastavus) ka lahutamatut komponenti.
Kolmas PID-komponent on diferentsiaalkomponent. See on loodud kompenseerima süsteemile avaldatava mõju ja tagasiside vahel tekkivate viivituste mõju.Proportsionaalregulaator annab võimsust seni, kuni temperatuur saavutab soovitud punkti, kuid teabe edastamisel seadmesse esineb alati vigu, eriti suurte väärtuste korral. See võib põhjustada ülekuumenemist. Diferentsiaal ennustab kõrvalekaldeid, mis on põhjustatud viivitustest või keskkonnamõjudest, ja vähendab etteantud võimsust.
PID-kontrolleri seadistamine
PID-kontrolleri seadistamine toimub kahel viisil:
- Süntees hõlmab parameetrite arvutamist süsteemi mudeli põhjal. Selline häälestamine on täpne, kuid nõuab sügavaid teadmisi automaatjuhtimise teooriast. Seda saavad teha ainult insenerid ja teadlased. Sest on vaja võtta vooluomadused ja teha palju arvutusi.
- Manuaalne meetod põhineb katse-eksituse meetodil. Selleks võetakse aluseks juba valmis süsteemi andmed ning tehakse mõningaid kohandusi ühes või mitmes regulaatori koefitsiendis. Pärast sisselülitamist ja lõpptulemuse jälgimist muudetakse parameetreid õiges suunas. Ja nii edasi, kuni saavutatakse soovitud töövõime.
Teoreetilist analüüsi- ja häälestamismeetodit kasutatakse praktikas harva, mis on tingitud juhtimisobjekti omaduste teadmatusest ja paljudest võimalikest häirivatest mõjutustest. Enam levinud on süsteemi vaatlusel põhinevad katsemeetodid.
Kaasaegseid automatiseeritud protsesse rakendatakse spetsiaalsete moodulitena regulaatori koefitsientide reguleerimise programmide juhtimisel.
PID regulaatori eesmärk
PID-regulaator on loodud selleks, et hoida nõutaval tasemel teatud väärtusi, nagu temperatuur, rõhk, paagi tase, vooluhulk torustikus, millegi kontsentratsioon jne, muutes täiturmehhanismide, näiteks automaatjuhtventiilide, juhtimistoiminguid. proportsionaalsed, integreerivad, eristavad väärtused selle seadmiseks.
Kasutamise eesmärk on saada täpne juhtsignaal, mis on võimeline juhtima suuri tööstusi ja isegi elektrijaamade reaktoreid.
Näide temperatuuri reguleerimise ahelast
Temperatuuri reguleerimisel kasutatakse sageli PID-regulaatoreid, selle automaatse protsessi vaatamiseks kasutame lihtsat näidet vee soojendamisest paagis.
Paak on täidetud vedelikuga, mis tuleb kuumutada soovitud temperatuurini ja hoida soovitud tasemel. Paagi sees on andur temperatuuri mõõtmiseks - termopaar või takistuse termomeeter ja on otse ühendatud PID-kontrolleriga.
Vedeliku soojendamiseks tarnime auru, nagu on näidatud alloleval joonisel, automaatse juhtventiiliga. Klapp ise saab kontrollerilt signaali. Operaator sisestab PID-regulaatorisse temperatuuri sättepunkti väärtuse, mida tuleb paagis hoida.

Kui regulaatori koefitsiendid on valed, tõuseb vee temperatuur ja klapp on täielikult avatud või täielikult suletud. Sel juhul tuleb PID koefitsiendid välja arvutada ja uuesti sisestada. Kui kõik on õigesti tehtud, võrdsustab süsteem lühikese aja pärast protsessi ja temperatuur paagis hoitakse seatud punktis, kusjuures juhtklapi avanemisaste on keskmises asendis.
Seotud artiklid: