Induktiivsus on mõõt, mis näitab elektriahela komponentide võimet salvestada magnetvälja energiat. See on ka voolu ja magnetvälja vahelise suhte mõõt. Seda võrreldakse ka elektri inertsiga, kuna mass on mehaaniliste kehade inertsi mõõt.

Sisu
Eneseinduktsiooni fenomen
Kui juhtivat ahelat läbiva voolu suurus on erinev, tekib iseinduktsiooni nähtus. Sel juhul muutub vooluringi läbiv magnetvoog ja vooluraami juhtmetes tekib EMF, mida nimetatakse iseinduktsiooni EMF-iks. See EMF on vastupidine voolu suunale ja on võrdne:
ε=-∆F/∆t=-L*(∆I/∆t)
Ilmselgelt on iseinduktsiooni EMF võrdne vooluahelat läbiva voolu muutusest põhjustatud magnetvoo muutumise kiirusega ja on ka võrdeline voolu muutumise kiirusega.Iseinduktsiooni EMF-i ja voolu muutumise kiiruse vahelist proportsionaalsuskoefitsienti nimetatakse induktiivsuseks ja seda tähistatakse L-ga. See väärtus on alati positiivne ja selle SI-ühik on 1 Henry (1 Gn). Kasutatakse ka murdosasid, milligenere ja mikrogenere. Me võime rääkida 1 Henry induktiivsusest, kui voolu muutus 1 amprine põhjustab 1 volti iseinduktsiooni EMF-i. Induktiivsus pole mitte ainult vooluahelal, vaid ka üksikul juhil ja mähisel, mida saab kujutada järjestikku ühendatud ahelate komplektina.
Energia salvestub induktiivsusesse, mida saab arvutada W=L*I2/2, kus:
- W - energia, J;
- L - induktiivsus, Gn;
- I - vool mähises, A.
Ja siin on energia otseselt võrdeline pooli induktiivsusega.
Tähtis! Inseneriteaduses viitab induktiivsus ka seadmele, milles elektriväli salvestatakse. Sellele määratlusele lähim tegelik element on induktiivpool.
Füüsikalise mähise induktiivsuse arvutamise üldvalem on keerulise kujuga ja praktiliste arvutuste jaoks ebamugav. Kasulik on meeles pidada, et induktiivsus on võrdeline pöörete arvu, pooli läbimõõduga ja sõltub geomeetrilisest kujust. Samuti mõjutab induktiivsust selle südamiku magnetiline läbilaskvus, millel mähis paikneb, kuid seda ei mõjuta pooli läbiv vool. Induktiivsuse arvutamiseks tuleb iga kord viidata konkreetse konstruktsiooni jaoks antud valemitele. Seega arvutatakse silindrilise mähise põhiomadused järgmise valemi järgi:
L=μ*μ*(N2*S/l),
Kus:
- μ on pooli südamiku suhteline magnetiline läbilaskvus;
- μ - magnetkonstant, 1,26*10-6 Gn/m;
- N - pöörete arv;
- S - mähise pindala;
- l - mähise geomeetriline pikkus.
Silindrilise mähise ja muude pooli kujundite induktiivsuse arvutamiseks on parem kasutada kalkulaatoriprogramme, sealhulgas veebikalkulaatoreid.
Induktiivsuste ühendamine järjestikku ja paralleelselt
Induktiivsusi saab ühendada järjestikku või paralleelselt, moodustades uute omadustega komplekti.
Paralleelühendus
Kui mähised on paralleelselt ühendatud, on pinged kõigil elementidel võrdsed ja voolud (vahelduv) on pöördvõrdelised elementide induktiivsustega.
- U=U1=U2=U3;
- I=I1+I2+I3.
Ahela koguinduktiivsus on defineeritud kui 1/L=1/L1+1/L2+1/L3. Valem kehtib suvalise arvu elementide puhul ja kahe mähise korral on see lihtsustatud kujule L=L1*L2/(L1+L2). On ilmne, et saadud induktiivsus on väiksem kui madalaima elemendi induktiivsus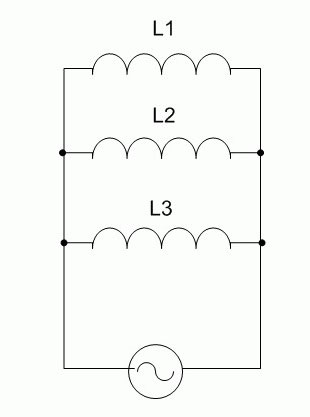
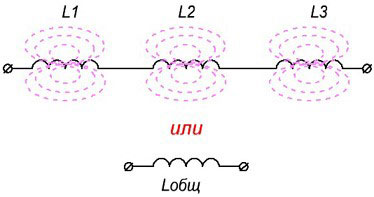
Seeriaühendus
Seda tüüpi ühenduse korral voolab sama vool läbi mähistest koosneva ahela ja pinge (AC!) ahela iga komponendi peal jaotatakse proportsionaalselt iga elemendi induktiivsusega:
- U=U1+U2+U3;
- I=I1=I2=I3.
Koguinduktiivsus võrdub kõigi induktiivsuste summaga ja on suurem kui suurima väärtusega elemendi induktiivsus. Seetõttu kasutatakse seda ühendust, kui on vaja induktiivsust suurendada.
Tähtis! Mähiste järjestikuse või paralleelse aku ühendamisel kehtivad arvutusvalemid ainult juhtudel, kus elementide magnetväljade vastastikune mõju üksteisele on välistatud (varjestuse, suure vahemaa jne abil). Kui mõju on olemas, sõltub induktiivsuse koguväärtus mähiste vastastikusest paigutusest.
Mõned praktilised küsimused ja induktiivpoolide konstruktsioonid
Praktikas kasutatakse erineva konstruktsiooniga induktiivpooli. Sõltuvalt otstarbest ja rakendusest saab seadet valmistada erineval viisil, kuid on vaja arvestada reaalsetes mähistes esinevate efektidega.
Induktiivpooli kvaliteeditegur
Päris mähisel on lisaks induktiivsusele mitmeid parameetreid ja üks olulisemaid on kvaliteeditegur. See väärtus määrab mähise kaod ja sõltub:
- oomikad kaod mähisjuhtmes (mida suurem on takistus, seda madalam on kvaliteeditegur);
- Dielektrilised kaod traadi ja mähise raami isolatsioonis;
- kaotused kilbis;
- Põhikaod.
Kõik need suurused määravad kadukindluse ja kvaliteeditegur on mõõtmeteta väärtus, mis on võrdne Q=ωL/R kadudega, kus:
- ω = 2*π*F - ringsagedus;
- L - induktiivsus;
- ωL - mähise reaktants.
Ligikaudu võib öelda, et kvaliteeditegur on võrdne reaktiivse (induktiivse) takistuse ja aktiivtakistuse suhtega. Ühelt poolt suureneb sageduse kasvades lugeja, kuid samal ajal nahaefekti tõttu suureneb ka kadumistakistus kasuliku traadi ristlõike vähenemise tõttu.
Nahaefekt
Võõrkehade, aga ka elektri- ja magnetvälja mõju ning elementide vastastikuse mõju vähendamiseks nende väljade kaudu asetatakse sageli varjesse poolid (eriti kõrgsageduslikud). Lisaks kasulikule efektile põhjustab varjestus mähise Q-teguri vähenemist, vähendades selle induktiivsust ja suurendades parasiitmahtuvust. Veelgi enam, mida lähemale kilbi seinad mähisele pöörduvad, seda suurem on kahjulik mõju. Seetõttu valmistatakse peaaegu alati varjestatud poolid parameetrite reguleerimise võimalusega.
Reguleeritav induktiivsus
Mõnel juhul on vaja pärast mähise ühendamist ahela teiste elementidega induktiivsuse väärtus täpselt paika seada, kompenseerides häälestamise ajal parameetrite kõrvalekaldeid. Selleks kasutatakse erinevaid meetodeid (pöörete ümberlülitamine jne), kuid kõige täpsem ja sujuvam meetod on südamikuga reguleerimine.See on valmistatud keermestatud varda kujul, mida saab raami sees sisse ja välja keerata, reguleerides mähise induktiivsust.

Muutuv induktiivsus (variomeeter)
Kui induktiivsuse või induktiivühenduse operatiivne reguleerimine on vajalik, kasutatakse erineva konstruktsiooniga pooli. Need sisaldavad kahte mähist, liikuvat mähist ja statsionaarset mähist. Koguinduktiivsus võrdub kahe pooli induktiivsuse ja nendevahelise vastastikuse induktiivsuse summaga.
Muutes ühe pooli suhtelist asendit teise suhtes, reguleeritakse kogu induktiivsuse väärtust. Sellist seadet nimetatakse variomeetriks ja seda kasutatakse sageli sideseadmetes resonantsahelate häälestamiseks juhtudel, kui muutuva võimsusega kondensaatorite kasutamine on mingil põhjusel võimatu. Variomeeter on üsna tülikas, mis piirab selle kasutusala.

Induktiivsus trükitud pooli kujul
Madala induktiivsusega pooli saab valmistada trükitud juhtide spiraali kujul. Sellise disaini eelised on järgmised:
- valmistatavus;
- parameetrite kõrge korratavus.
Puuduseks on peenhäälestuse võimatus reguleerimise ajal ja suurte induktiivsuse väärtuste saamise raskus - mida suurem on induktiivsus, seda rohkem ruumi võtab pool plaadil.

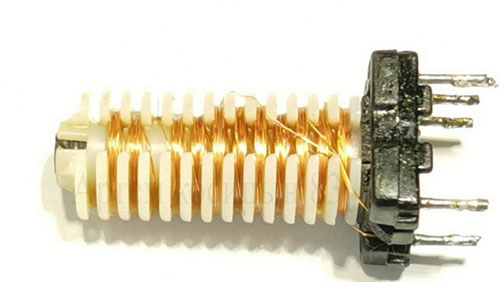
Sektsioonmähisega mähis
Induktiivsus ilma mahtuvuseta toimub ainult paberil. Mähise mis tahes füüsilise teostuse korral tekib kohe parasiitmähise mahtuvus. See on paljudel juhtudel kahjulik nähtus. Hajumahtuvus liidetakse kokku LC-ahela mahtuvusega, vähendades resonantssagedust ja võnkesüsteemi kvaliteeditegurit. Samuti on mähisel oma resonantssagedus, mis kutsub esile soovimatud nähtused.
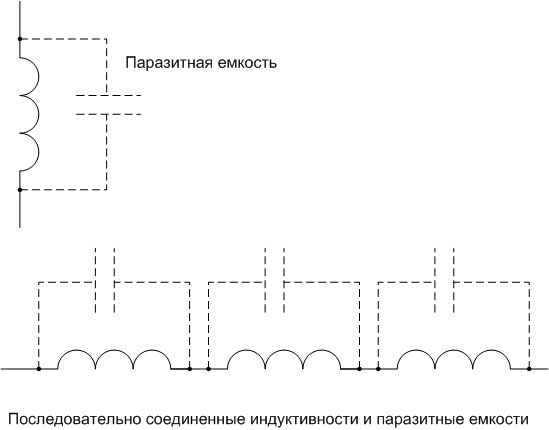
Hajumahtuvuse vähendamiseks kasutatakse erinevaid meetodeid, millest lihtsaim on induktiivpoolide mähis mitme järjestikku ühendatud sektsiooni kujul. Selle ühendusega liidetakse induktiivsused ja kogumahtuvus väheneb.
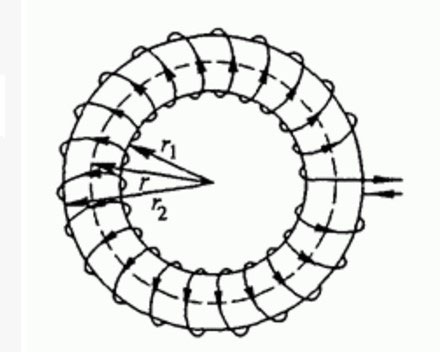
Induktiivmähis toroidsüdamikul
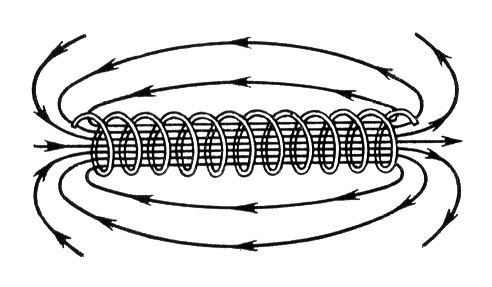
Silindrilise induktiivpooli magnetvälja jõujooned jooksevad läbi mähise sisemuse (kui on südamik, siis läbi selle) ja lühistatakse läbi õhu. Sellel asjaolul on mitmeid puudusi:
- Induktiivsus väheneb;
- mähise omadused on vähem arvutatavad;
- mis tahes välisesse magnetvälja viidud objekt muudab pooli parameetreid (induktiivsus, parasiitmahtuvus, kaod jne), mistõttu on paljudel juhtudel vajalik varjestus.
Toroidaalsetele südamikele keritud mähised (rõnga või "bagel" kujul) on nendest puudustest suures osas vabad. Magnetjooned kulgevad südamiku sees suletud ahelate kujul. See tähendab, et välised objektid peaaegu ei mõjuta sellisele südamikule keritud mähise parameetreid ja sellise konstruktsiooni puhul pole varjestus vajalik. Samuti suureneb induktiivsus, kui kõik muud parameetrid on võrdsed, ja karakteristikuid on lihtsam arvutada.
Torusidele keritud mähiste puuduste hulka kuulub võimetus induktiivsust sujuvalt kohale reguleerida. Probleemiks on ka mähise suur töömahukus ja madal valmistatavus. See kehtib aga suuremal või vähemal määral kõikide induktiivsete elementide kohta üldiselt.
Samuti on induktiivsuse füüsilise rakendamise tavaliseks puuduseks suured massimõõtmed, suhteliselt madal töökindlus ja madal hooldatavus.
Seetõttu püütakse tehnoloogias induktiivkomponentidest lahti saada. Kuid see ei ole alati võimalik, nii et mähiskomponente kasutatakse nii lähitulevikus kui ka keskpikas perspektiivis.
Seotud artiklid: