La ciencia de la electricidad en los siglos XIX y XX se desarrolló rápidamente, lo que llevó a la creación de motores eléctricos asíncronos. Con estos dispositivos, el desarrollo de la industria ha dado un salto de gigante y ahora es imposible imaginar fábricas y plantas sin la asistencia de máquinas asíncronas.
Contenido
Historia
La historia del motor asíncrono se remonta a 1888, cuando Nikola Tesla patentó un circuito de motor eléctrico, el mismo año que otro científico eléctrico, Gallileo Ferrari Gallileo Ferraris publicó un artículo sobre los aspectos teóricos de la máquina asíncrona.
En 1889 un físico ruso Mijaíl Osipovich Dolivo-Dobrovolsky recibe una patente en Alemania para un motor eléctrico asíncrono trifásico.

Todos estos inventos han permitido mejorar las máquinas eléctricas y han conducido a la utilización masiva de máquinas eléctricas en la industria, que han acelerado enormemente todos los procesos de fabricación, han mejorado la eficacia y han reducido la intensidad de la mano de obra.
Actualmente, el motor eléctrico más utilizado en la industria es el prototipo de máquina eléctrica creado por Dolivo-Dobrovolsky.
Diseño y principio de funcionamiento del motor asíncrono
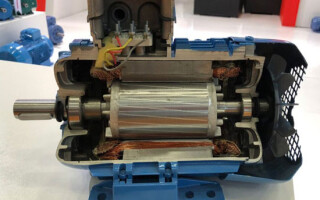
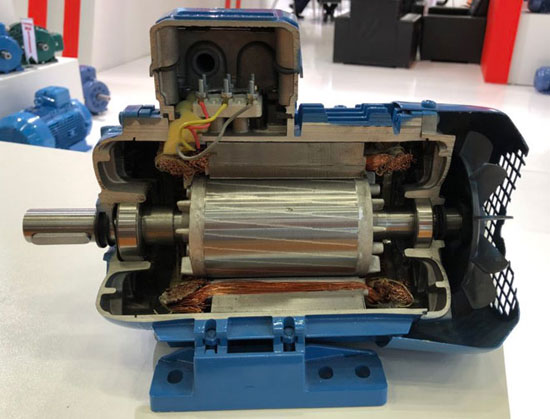
Los principales componentes de un motor eléctrico asíncrono son el estator y el rotor, que están separados entre sí por un entrehierro. El trabajo activo en el motor lo realizan los devanados y el núcleo del rotor.
La asincronía del motor se define como la diferencia entre la velocidad del rotor y la del campo electromagnético.
Estator - es una parte fija del motor cuyo núcleo es de acero eléctrico y está montado en el bastidor base. El marco está fundido en un material no magnetizado (por ejemplohierro fundido, aluminio). Los devanados del estator son un sistema trifásico en el que los cables están colocados en ranuras con un ángulo de desviación de 120 grados. Los devanados se conectan a la red en circuitos en estrella o en triángulo de forma estándar.

El rotor - es la parte móvil del motor. Existen dos tipos de rotores para los motores asíncronos: los de jaula de ardilla y los de fase. Estos tipos difieren en el diseño del bobinado del rotor.
Motor de inducción con rotor de jaula de ardilla
Este tipo de máquina eléctrica fue patentada por primera vez por M.O. Dolivo-Dobrovolsky y se llama popularmente "rueda de ardilla" por su aspecto. El devanado del rotor en cortocircuito está formado por barras de cobre en cortocircuito (aluminio, latón) y se insertan en las ranuras del bobinado del núcleo del rotor. Este tipo de rotor no tiene contactos móviles, por lo que estos motores son muy fiables y duraderos en su funcionamiento.
Motor asíncrono con rotor de fase
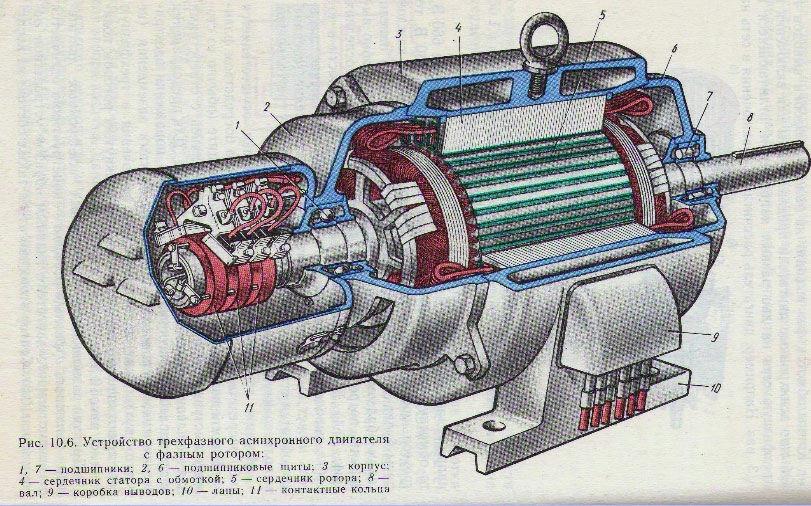
Este dispositivo permite variar la velocidad en un amplio rango. El rotor de fase es un devanado trifásico conectado en estrella o en triángulo. Estos motores están equipados con escobillas especiales que pueden utilizarse para controlar la velocidad del rotor. Si se añade un reóstato especial al mecanismo de un motor de este tipo, se reducirá la resistencia de arranque del motor y se minimizarán las corrientes de entrada, que tienen un efecto perjudicial en la red y en el propio dispositivo.
Principio de funcionamiento
Cuando se aplica corriente eléctrica a los devanados del estator, se genera un flujo magnético. Como las fases están desplazadas entre sí 120 grados, el flujo en los devanados gira. Si el rotor está en cortocircuito, esta rotación genera una corriente en el rotor que crea un campo electromagnético. Al interactuar entre sí, los campos magnéticos del rotor y del estator hacen girar el rotor del motor eléctrico. Si el rotor está desfasado, se aplica tensión al estator y al rotor simultáneamente, aparece un campo magnético en cada mecanismo, interactúan entre sí y hacen girar el rotor.
Ventajas de los motores asíncronos
| Con rotor de jaula de ardilla | Con rotor bobinado en fase |
|---|---|
| 1. Dispositivo y circuito de puesta en marcha sencillos | 1. Baja corriente de arranque |
| 2. Bajo precio de fabricación | 2. Velocidad variable. |
| 3. La velocidad del eje no cambia al aumentar la carga. | 3. Funcionamiento con bajas sobrecargas sin variación de velocidad. |
| 4. Capaz de soportar sobrecargas de corta duración. | 4. Puede aplicar un reinicio automático |
| 5. Fiabilidad y durabilidad en el funcionamiento | 5. Tiene un alto par motor |
| 6. Apto para cualquier condición de trabajo | |
| 7. Tiene una alta eficiencia |
Desventajas de los motores asíncronos
| Con rotor de jaula de ardilla | Con rotor bobinado en fase |
|---|---|
| 1. La velocidad del rotor no se puede controlar | 1. De gran tamaño |
| 2. Bajo par de arranque | 2. Menor eficiencia |
| 3. Alta corriente de arranque | 3. Mantenimiento frecuente debido al desgaste de las escobillas |
| 4. Cierta complejidad en el diseño y los contactos móviles |
Los motores asíncronos son dispositivos muy eficientes y con buenas características mecánicas, por lo que son el tipo de motor más utilizado.
Modos de funcionamiento

Un motor eléctrico asíncrono es un mecanismo versátil y tiene varios modos de funcionamiento en términos de duración:
- Continuo;
- En corto tiempo;
- Intermitente; Periódico;
- Intermitente;
- Especial.
Funcionamiento continuo - El modo básico de funcionamiento de los dispositivos asíncronos, que se caracteriza por el funcionamiento continuo del motor eléctrico sin paradas con una carga constante. Este modo de funcionamiento es el más común y se utiliza en las plantas industriales de todo el mundo.
Operación de corta duración - Funciona hasta que se alcanza una carga constante durante un tiempo determinado (De 10 a 90 minutos) sin tener suficiente tiempo para calentarse. Transcurrido este tiempo, se apaga. Este modo se utiliza para el transporte de fluidos (agua, aceite, gas, etc.).agua, petróleo, gas) y otras situaciones.
Funcionamiento intermitente - La duración del funcionamiento es fija y, al terminar el ciclo de trabajo, se desconecta. Modo de funcionamiento de arranque-operación-parada. Se puede apagar durante un tiempo para que tenga tiempo de enfriarse a la temperatura exterior y volver a encenderlo.
Funcionamiento intermitente - El motor no se calienta hasta la temperatura máxima, pero tampoco se enfría hasta la temperatura ambiente. Se utiliza en ascensores, escaleras mecánicas, etc.
Modo especial - La duración y el período de activación son arbitrarios.
En ingeniería eléctrica existe el principio de la reversibilidad de las máquinas eléctricas, lo que significa que el dispositivo puede tanto convertir la energía eléctrica en energía mecánica como realizar la acción inversa.
Los motores asíncronos también se ajustan a este principio y tienen un modo motor y un modo generador.
Funcionamiento del motor - es el modo básico de funcionamiento de un motor eléctrico asíncrono. Cuando se aplica tensión a los devanados, se genera un par electromagnético que arrastra al rotor con el eje y así el eje comienza a girar, el motor llega a una velocidad constante, realizando un trabajo útil.
Modo generador - se basa en el principio de que la corriente eléctrica en los devanados del motor es generada por la rotación del rotor. Si el rotor del motor gira mecánicamente, se genera una fuerza electromotriz en los devanados del estator, con un condensador en los devanados, se genera una corriente capacitiva. Si la capacidad del condensador tiene un valor determinado, dependiendo de las características del motor, el generador se autoexcitará y se producirá un sistema de tensión trifásica. Por lo tanto, el motor de jaula de ardilla funcionará como un generador.
Control de velocidad para motores asíncronos
Existen los siguientes métodos para regular la velocidad de los motores eléctricos asíncronos y para controlar sus modos de funcionamiento:
- Frecuencia: al cambiar la frecuencia de la corriente en la red eléctrica, se modifica la velocidad del motor eléctrico. Para este método se utiliza un dispositivo llamado convertidor de frecuencia;
- Reóstato: al cambiar la resistencia del reóstato en el rotor, la velocidad de rotación cambia. Este método aumenta el par de arranque y el deslizamiento crítico;
- Pulsado: método de control en el que se aplica un tipo especial de tensión al motor.
- Los devanados se cambian de estrella a triángulo mientras el motor eléctrico está en marcha, lo que reduce las corrientes de arranque;
- Control con cambio de pares de polos para rotores de jaula de ardilla;
- Conexión de una resistencia inductiva para motores de rotor de fase.
Con el desarrollo de los sistemas electrónicos, el control de diversos motores asíncronos es cada vez más eficaz y preciso. Estos motores se utilizan en todo el mundo, la variedad de tareas que realizan estos mecanismos aumenta día a día y su necesidad no disminuye.
Artículos relacionados: