
Los motores eléctricos son máquinas sencillas y fiables, pero también tienen algunos inconvenientes que complican su uso. Estas unidades, en particular, tienen un elevado consumo de corriente en el momento del arranque y, sin dispositivos especiales, se ponen en marcha de forma brusca debido al desequilibrio entre el par del motor y la carga en su eje. Los arrancadores suaves son dispositivos adicionales que permiten que el motor funcione suavemente en el momento del arranque y reducen las corrientes de arranque.

Contenido
¿Qué es un arranque suave?
Arranque suave (SOFT STARTER) - es un dispositivo eléctrico que se utiliza en el funcionamiento de los motores asíncronos y permite supervisar y controlar su arranque y sus parámetros para un funcionamiento seguro en la red de corriente alterna. Este dispositivo reduce el impacto de una serie de factores negativos en el motor, como la reducción de la probabilidad de un calentamiento excesivo del motor, la eliminación de las sacudidas, la garantía de un arranque suave y el alcance de la carga de funcionamiento. Los arrancadores suaves también reducen el impacto negativo en la red eléctrica al disminuir las corrientes de arranque del motor.
Los especialistas en electricidad y las personas relacionadas con el funcionamiento de los motores eléctricos suelen denominar a los arrancadores suaves. Esto se debe a que en inglés (y la mayoría de los dispositivos de calidad son importados) estos dispositivos se denominan "arranque suave".que significa "arranque suave".
Arrancador suave para motores eléctricos mediante convertidores de frecuencia El arrancador suave permite una amplia gama de aplicaciones y el control del motor dentro de un amplio rango de parámetros. El uso del controlador es particularmente común en condiciones de arranque pesado (por ejemplocon gran inercia o el arranque bajo carga con corrientes de arranque cuádruples, arrancando el motor durante al menos 30 segundos.) y el arranque extremadamente pesado (con corrientes de arranque seis u ocho veces superiores y tiempos de aceleración del motor más largos.).

El controlador también se utiliza en la capacidad reducida o limitada de las redes eléctricas cuando las corrientes de irrupción pueden causar una sobrecarga significativa de la red, incluyendo el efecto en el equipo de protección automática, que en los valores altos de la corriente de irrupción, incluso de efecto a corto plazo, desconecta el suministro de energía.
La gama de aplicaciones de los arrancadores suaves es amplia: se utilizan en unidades de bombeo, equipos de ventilación y compresores, motores eléctricos en industrias pesadas y construcción, equipos de trituración, cintas transportadoras, escaleras mecánicas y otras máquinas y equipos.
Principio de funcionamiento
La principal desventaja de los motores asíncronos - es que el par en el eje es proporcional al cuadrado de la tensión aplicada al motor. Esto crea una fuerte sacudida al arrancar y al parar, lo que también aumenta la corriente de inducción.
Los arrancadores suaves pueden ser mecánicos, eléctricos o una combinación de las características positivas de ambos.
Los arrancadores suaves mecánicos funcionan según el principio de contrarrestar un aumento repentino de la velocidad de un motor eléctrico afectando mecánicamente a su rotor con zapatas de freno, diversos embragues, contrapesos, bloqueadores magnéticos y otros mecanismos. Este tipo de mecanismos no suelen utilizarse hoy en día, ya que existen dispositivos de control eléctrico más avanzados.
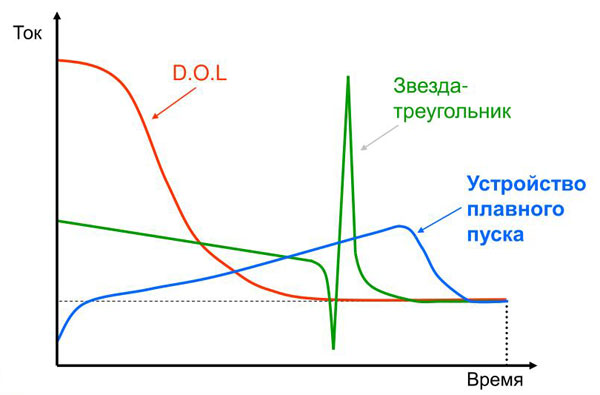
Los arrancadores suaves eléctricos aumentan gradualmente la corriente o la tensión desde un nivel de referencia hasta el máximo, lo que permite un aumento suave de la velocidad del motor y reduce las cargas y las corrientes de entrada. La mayoría de las veces, los arrancadores suaves eléctricos se controlan electrónicamente mediante sistemas informáticos o dispositivos electrónicos, lo que permite modificar los parámetros de arranque y controlar las características dinámicas. Los arrancadores suaves permiten variar los modos de funcionamiento del motor en función de la carga aplicada y permiten realizar una relación particular entre la velocidad del eje y la tensión.
El principio de funcionamiento de los dispositivos eléctricos se basa en dos métodos:
- El método de limitación de la corriente del devanado del rotor - implementado por medio de bobinas conectadas en forma de estrella;
- Método de limitación de tensión y corriente en el estator (mediante tiristores, triacs o reóstatos).
También se distingue entre aparatos monofásicos, bifásicos y trifásicos. Los SPD monofásicos regulados por tensión se utilizan para equipos de hasta 10 kW, las ventajas de este tipo de regulación son la reducción de los choques dinámicos y las sacudidas durante el arranque, los aspectos negativos son el desequilibrio de la carga durante el arranque y las altas corrientes de entrada. Los arrancadores suaves con control bifásico reducen las corrientes de entrada y el calentamiento del motor durante el arranque y se utilizan para condiciones de arranque medio-pesado. Los arrancadores suaves trifásicos reducen considerablemente las corrientes de entrada y permiten la parada suave del motor, así como el disparo de emergencia. Estos arrancadores suaves se utilizan para arrancar con cargas pesadas y para arrancar y parar el motor con frecuencia.
Esquema de conexión del motor para el controlador
Para conectar el arrancador suave al motor y a la red eléctrica hay que seguir el manual de instrucciones de este tipo de dispositivos, en el que se indican todos los aspectos importantes a la hora de realizar la conexión: secuencia del circuito, terminales de tierra y neutro, y el ajuste correcto de la puesta en marcha, la aceleración y la deceleración. Pero en general, hay métodos de conexión estándar que son adecuados para la mayoría de los arrancadores suaves.
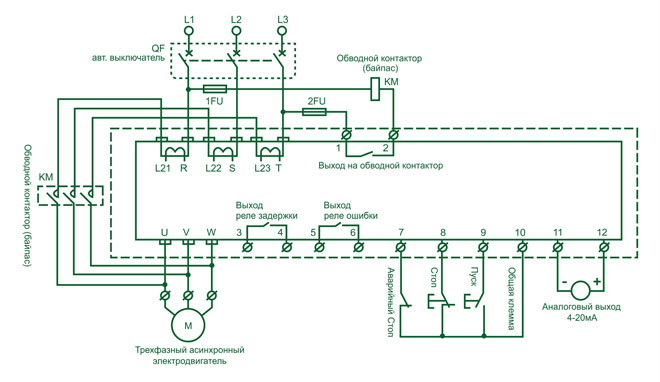
Cada controlador tiene un contacto de entrada e igual número de contactos de salida para la conexión de fases, un sistema de control de arranque y parada (Botones START, STOP), otros pulsadores y contactos de control. La unidad está equipada con cables de alimentación a los terminales de entrada (normalmente designados como L1, L2, L3) y de los terminales de salida (designados T1, T2, T3) conectar el motor. Es importante conectar el controlador a la red eléctrica a través de un disyuntor de protección del motor y al conectar el motor al arrancador suave y el controlador a la red, utilice cables con la sección nominal que corresponda al límite de corriente del motor.
Algunas unidades pueden controlarse no sólo mediante interruptores y dispositivos de control en la propia unidad, sino también a través de contactos de relés o controladores; esto complica el diagrama de cableado de la unidad, pero amplía sus capacidades.
¿Cuáles son los criterios para seleccionar un arrancador suave?
Hay varios criterios importantes que permiten que un arrancador suave se adapte correctamente al motor eléctrico y a sus condiciones de funcionamiento.
- Corriente del motorEl arrancador suave se selecciona en función de la corriente a plena carga del motor, que no debe ser superior a la corriente de carga máxima del controlador. Lo mejor es que la corriente para la que está diseñado el arrancador progresivo sea superior a la corriente de carga máxima del motor.
- Limitar el número de arranques por horaLímite del número de arranques por hora: generalmente está limitado por el tipo de arrancador progresivo y, para una vida útil fiable y larga del dispositivo, es importante que no se supere este límite.
- Tensión de redLa tensión de red: Los arrancadores suaves tienen diferentes funciones y operan con diferentes tensiones de red, por lo que la tensión debe ser la misma que la nominal del arrancador suave.
Todos estos parámetros se especifican necesariamente en la hoja de datos del arrancador progresivo y la selección para las condiciones específicas de funcionamiento del motor eléctrico y de la red eléctrica debe realizarse al seleccionar el arrancador progresivo.
Artículos relacionados:





