Modulation er en ikke-lineær elektrisk proces, hvor parametrene for et signal (bærer) ændres af et andet signal (modulering, information). Inden for kommunikationsteknik anvendes frekvens-, amplitude- og fasemodulation i vid udstrækning. Inden for effektelektronik og mikroprocessorteknologi bliver pulsbreddemodulation mere og mere almindelig.
Indhold
Hvad er PWM (Pulse Width Modulation)?
Ved pulsbreddemodulation forbliver amplitude, frekvens og fase af det oprindelige signal uændret. Varigheden (bredden) af den kvadratiske puls påvirkes af informationssignalet. I engelsk faglitteratur betegnes det med forkortelsen PWM - pulse-width modulation.
Funktionsprincip for PWM
Pulsbreddemoduleret signal dannes på to måder:
- analog;
- digital.
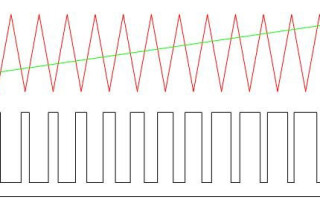
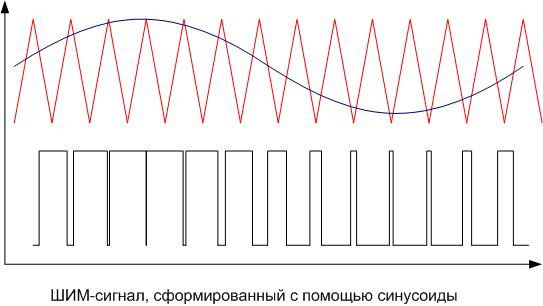
I den analoge PWM-generationsmetode tilføres et bæresignal i form af en savtakket eller trekantet bølgeform til den inverterende komparatorens indgangog informationssignalet tilføres til komparatorens ikke-inverterende indgang. Hvis det øjeblikkelige bæresignalniveau er højere end det modulerende signal, er komparatorudgangen nul, hvis den er lavere, er den et. Udgangen er et diskret signal med en frekvens, der svarer til frekvensen af bæredrejernet eller savtakket, og en pulslængde, der er proportional med det modulerende spændingsniveau.
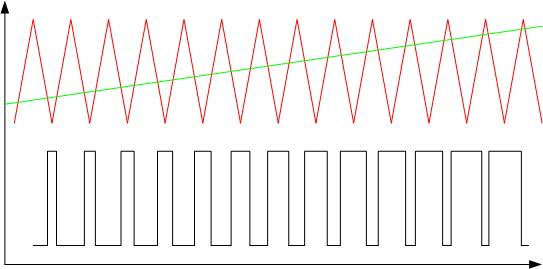
Som et eksempel vises pulsbreddemodulationen af et trekantssignal med en lineær stigende puls. Varigheden af udgangspulserne er proportional med niveauet af udgangssignalet.
Analoge PWM-controllere fås også som integrerede kredsløb, der indeholder en komparator og et kredsløb til generering af carrier-kredsløb. Der er indgange til tilslutning af eksterne frekvenskoderelementer og informationssignalet. Udgangen bruges til at drive kraftige eksterne afbrydere. Der er også feedback-indgange til at opretholde de indstillede kontrolparametre. Dette er f.eks. tilfældet med TL494-chippen. PWM-controllere med interne kontakter er tilgængelige til applikationer med relativt lav forbrugseffekt. Den interne switch i LM2596 er beregnet til strømme på op til 3 ampere.
Den digitale metode opnås ved hjælp af specialiserede chips eller mikroprocessorer. Pulslængden styres af et internt program. Mange mikrocontrollere, herunder de populære PIC og AVR, har et indbygget modul til implementering af hardware-PWM. For at få PWM-signal er det nødvendigt at aktivere modulet og indstille dets driftsparametre. Hvis der ikke er et sådant modul, kan PWM arrangeres udelukkende ved hjælp af softwaremetoden, det er ikke svært. Denne metode giver flere muligheder og større frihed på grund af fleksibel brug af udgange, men kræver flere ressourcer af controlleren.
PWM-signalets egenskaber
De vigtige egenskaber ved PWM-signalet er:
- amplitude (U);
- frekvens (f);
- Arbejdscyklus (S) eller fyldningsfaktor D.
Amplituden i volt indstilles i overensstemmelse med belastningen. Den skal sikre den nominelle forsyningsspænding til forbrugeren.
Frekvensen af det pulsbreddemodulerede signal vælges ud fra følgende overvejelser:
- Jo højere frekvens, jo større er reguleringsnøjagtigheden.
- Frekvensen må ikke være lavere end responstiden for den enhed, der styres med PWM, da der ellers vil være en mærkbar krusning i den styrede parameter.
- Jo højere frekvens, jo højere er koblingstabet. Dette skyldes, at nøglen har en begrænset omstillingstid. I den låste tilstand falder hele forsyningsspændingen over nøgleelementet, men der er næsten ingen strøm. I åben tilstand strømmer den fulde belastningsstrøm gennem nøglen, men spændingsfaldet er lille, fordi gennemgangsmodstanden er få ohm. I begge tilfælde er strømforbruget ubetydeligt. Overgangen fra den ene tilstand til den anden er hurtig, men ikke øjeblikkelig. Under åbnings- og lukningsprocessen falder der en høj spænding på det delvist åbne element, og samtidig strømmer der en betydelig strøm gennem elementet. I denne periode når strømforbruget høje værdier. Denne periode er kort, og nøglen har ikke tid til at blive opvarmet væsentligt. Men når frekvensen stiger, er der flere sådanne tidsintervaller pr. tidsenhed, og varmetabet stiger. Derfor er det vigtigt at anvende hurtigtvirkende elementer i konstruktionen af nøgler.
- Ved styring af en motorer frekvensen skal være uden for det område af frekvenser, der kan læses af mennesker - 25 kHz og derover. Dette skyldes, at en lavere koblingsfrekvens resulterer i en ubehagelig fløjtestøj.
Disse krav er ofte i modstrid med hinanden, så valget af frekvens er i nogle tilfælde et kompromis.
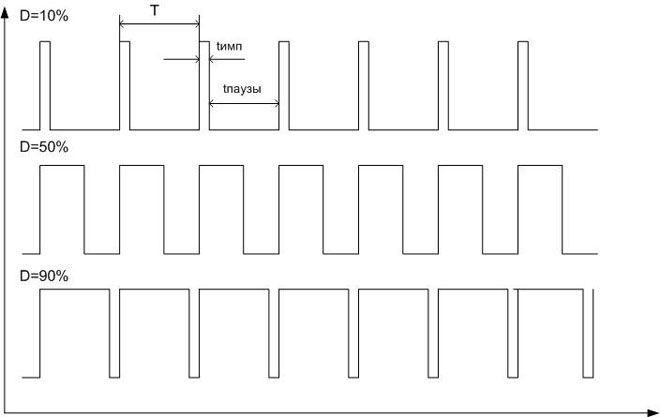
Modulationsværdien er karakteriseret ved duty cycle. Da pulsgennemgangshastigheden er konstant, er periodens varighed også konstant (T=1/f). En periode består af en puls og en pause, som har en varighed på timp og tpause, hvor timp+tpause=Т. Forholdet er forholdet mellem impulsvarighed og periode - S=timp/T. Men i praksis viste det sig at være mere praktisk at bruge den omvendte værdi - fyldningsfaktor: D=1/S=T/timp.. Det er endnu mere praktisk at udtrykke fyldningsfaktoren som en procentdel.
Hvad er forskellen mellem PWM og PWM
I udenlandsk faglitteratur skelnes der ikke mellem pulsbreddemodulation og pulsbredderegulering (PWM). Russiske eksperter forsøger at skelne mellem disse begreber. PWM er faktisk en form for modulering, dvs. ændring af bæresignalet under påvirkning af et andet, modulerende signal. Bærersignalet fungerer som bærer, og det modulerende signal indstiller informationen. Og pulsbreddekontrol er regulering af belastningstilstanden ved hjælp af PWM.
Årsager og anvendelser for PWM
Princippet om puls-breddemodulation anvendes i Hastighedsstyring til induktionsmotorer med høj effekt. I dette tilfælde genereres et modulerende variabelt frekvenssignal (enfaset eller trefaset) ved hjælp af en sinusgenerator med lav effekt og overlejres analogt på bæresignalet. Udgangen er et PWM-signal, som sendes til tasterne for effektbehov. Den resulterende pulssekvens kan derefter passeres gennem et lavpasfilter, f.eks. en simpel RC-kæde, og den oprindelige sinusbølge kan udtrækkes. Eller du kan undvære den - filtrering vil ske naturligt på grund af motorens inerti. Jo højere bærefrekvensen er, jo mere ligger outputbølgeformen naturligvis tæt på den oprindelige sinusform.
Der opstår et naturligt spørgsmål - hvorfor kan oscillatorsignalet f.eks. ikke forstærkes på én gang, ved hjælp af højtydende transistorer? Fordi reguleringselementet, der fungerer i lineær tilstand, omfordeler strømmen mellem belastningen og kontakten. Dette vil medføre, at meget strøm går til spilde på nøgleelementet. Hvis derimod et reguleringselement med høj effekt fungerer i nøgletilstand (trinistor, triac, RGBT-transistor), fordeles effekten over tid. Tabene vil være meget lavere, og effektiviteten vil være meget højere.
I digital teknologi er der ikke noget særligt alternativ til pulsbreddekontrol. Her er signalamplituden konstant, og spænding og strøm kan kun ændres ved at modulere bærepulsens bredde og efterfølgende beregne et gennemsnit. Derfor anvendes PWM til spændings- og strømstyring i applikationer, der kan beregne et gennemsnit af pulssignalet. Gennemsnitsberegning kan foretages på forskellige måder:
- Gennem belastningens inerti. F.eks. betyder den termiske inerti i termoelektriske varmeapparater og glødelamper, at kontrolobjekterne ikke køler mærkbart ned mellem impulserne.
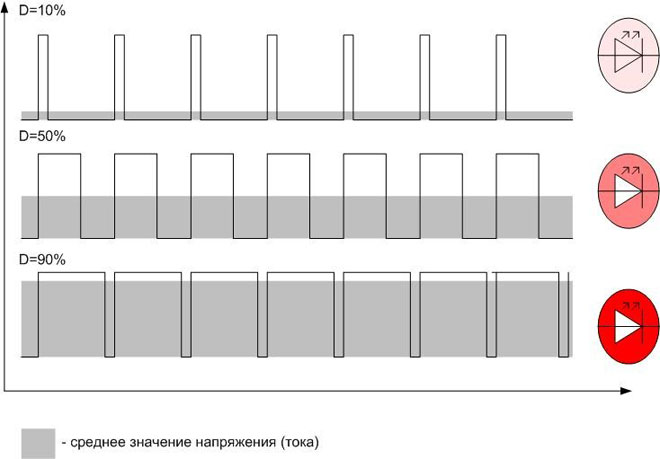
- På grund af opfattelsens inerti. En LED lyser fra puls til puls, men det menneskelige øje bemærker ikke dette og opfatter det som en konstant glød med varierende intensitet. Dette princip bruges til at styre lysstyrken af LED-punkter. Men et par hundrede hertz af umærkelige blink er stadig til stede og forårsager øjentræthed.
- På grund af mekanisk inerti. Denne egenskab anvendes i styring af DC-kollektormotorer. Med den rigtige styringsfrekvens har motoren ikke tid til at gå i stå i dødtidspauserne.
Derfor anvendes PWM, hvor den gennemsnitlige spændings- eller strømværdi spiller en afgørende rolle. Ud over de ovenfor nævnte almindelige tilfælde regulerer PWM-metoden gennemsnitsstrømmen i svejsemaskiner og batteriopladere osv.
Hvis naturlig midling ikke er mulig, kan denne rolle i mange tilfælde overtages af det allerede nævnte lavpasfilter (LPF) i form af en RC-kæde. Til praktiske formål er dette nok, men det skal forstås, at det er umuligt at adskille det oprindelige signal fra PWM-signalet med en LPF uden forvrængning. PWM-spektret indeholder trods alt et uendeligt stort antal overtoner, som uundgåeligt vil falde ind i filterets båndbredde. Du skal derfor ikke gøre dig nogen illusioner om formen af den rekonstruerede sinusoid.
PWM-styring af en RGB LED er meget effektiv og virkningsfuld. Denne enhed har tre p-n-forbindelser - rød, blå og grøn. Ved at variere lysstyrken for hver kanal separat kan næsten alle LED-farver (undtagen ren hvid) opnås. Mulighederne for at skabe lyseffekter med PWM er uendelige.
Den mest almindelige anvendelse af et PWM-moduleret digitalt signal er at styre den gennemsnitlige strøm eller spænding, der strømmer gennem en belastning. Men det er også muligt at bruge denne type modulation på utraditionelle måder. Det hele afhænger af designerens fantasi.
Relaterede artikler: