En sensor er generelt set en anordning, der omdanner en fysisk størrelse til en anden, som kan behandles, transmitteres eller konverteres. Det første er normalt en fysisk størrelse, der ikke kan måles direkte (temperatur, hastighed, forskydning osv.), mens det andet er et elektrisk eller optisk signal. Sensorer, hvis grundelement er induktionsspolen, indtager deres egen niche inden for måleinstrumenter.
Om
Hvordan induktive sensorer er konstrueret, og hvordan de fungerer
Induktive sensorer er i kraft af deres funktionsprincip aktive, dvs. at de kræver en ekstern oscillator. Dette genererer et signal med en defineret frekvens og amplitude i induktionsspolen.
Den strøm, der løber gennem spolerne, skaber et magnetfelt. Hvis en ledende genstand kommer ind i magnetfeltet, ændres spolens parametre. Det eneste, der mangler, er at opdage denne ændring.
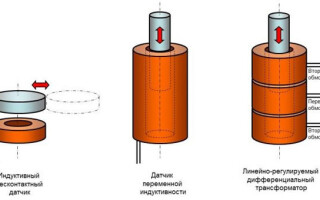
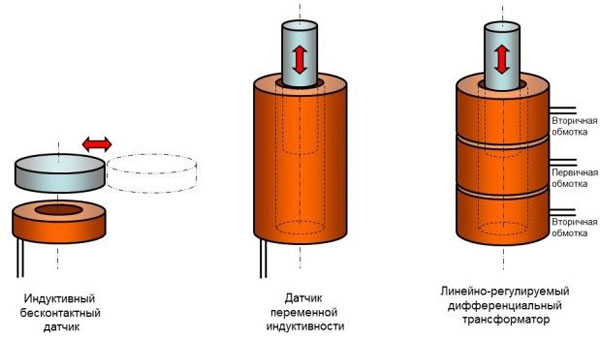
Enkle berøringsfri sensorer reagerer på tilstedeværelsen af metalgenstande i spolens nærfelt. Dette ændrer spolens impedans, og denne ændring skal omdannes til et elektrisk signal, forstærkes og/eller detekteres af et sammenligningskredsløb.
En anden type sensor reagerer på en ændring i den langsgående position af en genstand, der tjener som spolekerne. Når objektets position ændres, glider det ind eller ud af spolen og ændrer derved dens induktans. Denne ændring kan omdannes til et elektrisk signal og måles. En anden version af denne sensor er, hvor en genstand skubbes ind på spolen udefra. Dette medfører en reduktion af induktansen som følge af afskærmningseffekten.
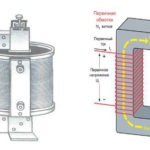
En anden version af en induktiv forskydningssensor er den lineære variable differentialtransformer (LVDT). Det er en sammensat spole, der er fremstillet i følgende rækkefølge:
- sekundærspole 1;
- primære vikling;
- sekundær vikling 2.
Signalet fra generatoren påføres den primære vikling. Det magnetiske felt, der skabes af den midterste spole, inducerer en EMF i hver af de sekundære spoler (transformerprincippet).transformerprincip). Når kernen bevæger sig, ændrer den den gensidige kobling mellem spolerne og ændrer den elektromotoriske kraft i hver af viklingerne. Denne ændring kan registreres af målekredsløbet. Da kernens længde er mindre end den samlede længde af den sammensatte spole, kan forholdet mellem EMF'erne i de sekundære viklinger entydigt bestemme objektets position.
En roterende encoder er baseret på det samme princip om ændring af den induktive kobling mellem viklingerne. Den består af to koaksialspoler. Signalet påføres en af viklingerne, EMF'en i den anden vikling afhænger af den indbyrdes rotationsvinkel.
Det fremgår tydeligt af funktionsprincippet, at induktive sensorer, uanset deres udformning, er berøringsfri sensorer. De fungerer på afstand og kræver ikke direkte kontakt med det objekt, der skal overvåges.
Fordele og ulemper ved induktive sensorer
Fordelene ved induktive sensorer er primært
- Robust konstruktion;
- ingen kontaktforbindelser;
- høj udgangseffekt, hvilket reducerer støjens indflydelse og forenkler kontrolkredsløbet;
- høj følsomhed;
- Mulighed for drift med vekselstrøm med industriel frekvens.
De største ulemper ved induktive sensorer er deres størrelse, vægt og kompleksitet. Der kræves særligt udstyr til at vikle spolerne med de krævede parametre. En anden ulempe er, at amplituden af signalet fra masteroscillatoren skal opretholdes nøjagtigt. Følsomhedsområdet ændres også, når signalamplituden ændres. Da sensorerne kun arbejder med vekselstrøm, er det et klart teknisk problem at opretholde amplituden. Det er ikke muligt at tilslutte sensoren direkte (eller via en nedtrapningstransformator) til et husholdnings- eller industrinet, hvor spændingsvariationer i amplitude eller frekvens kan være op til 10 %, selv under normal drift, hvilket gør målepræcisionen uacceptabel.
Målenøjagtigheden kan også påvirkes af:
- Eksterne magnetfelter (det er ikke muligt at afskærme sensoren på grund af dens funktionsprincip);
- side EMF-induktioner i forsynings- og målekablerne
- produktionsfejl;
- Fejl i sensorkarakteristikken;
- Tilbageslag eller deformationer på sondens monteringssted, som ikke påvirker den generelle ydeevne;
- Nøjagtighedsafhængighed af temperaturen (vikletrådsparametrene, herunder dens modstand, ændres).
Induktanssensorers manglende evne til at reagere på tilstedeværelsen af dielektriske genstande i deres magnetfelt kan betragtes som både en fordel og en ulempe. På den ene side begrænser dette anvendelsesområdet. På den anden side gør det dem ufølsomme over for snavs, fedt, sand osv. på de overvågede genstande.
Ved at forstå begrænsningerne og de mulige begrænsninger ved induktive sensorer kan fordelene ved induktive sensorer udnyttes rationelt.
Anvendelsesområder for induktive sensorer
Induktive nærhedsafbrydere anvendes ofte som grænsekontakter. Disse enheder anvendes til en lang række forskellige formål:
- i sikkerhedssystemer som sensorer for uautoriseret åbning af vinduer og døre;
- i fjernstyringssystemer som grænsepositionssensorer for samlinger og mekanismer;
- i hverdagen i indikeringskredsløb for lukkede døre, vinduer og vinduesrammer;
- til tælling af genstande (f.eks. genstande, der bevæger sig på et transportbånd);
- til bestemmelse af tandhjulets omdrejningshastighed (hver tand, der passerer forbi sensoren, genererer en impuls);
- I andre situationer.

Vinkelpositionsenkodere kan bruges til at bestemme rotationsvinkler på aksler, gear og andre roterende enheder og også som absolutte enkodere. De kan også anvendes i værktøjsmaskiner og robotter sammen med lineære enkodere. Hvor det er nødvendigt at kende den nøjagtige placering af maskinkomponenter.
Praktiske anvendelser for induktive sensorer
I praksis kan induktive sensordesigns implementeres på en række forskellige måder. Den enkleste implementering og indarbejdelse er den enkeltstående totrådssensor, som overvåger tilstedeværelsen af metalgenstande inden for dens aftastningsområde. Disse enheder er ofte fremstillet på grundlag af en W-formet kerne, men det er ikke afgørende. Denne konstruktion er lettere at fremstille.
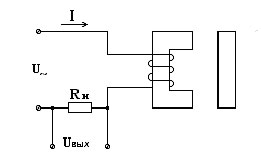
Når spolens modstand ændres, ændres strømmen i kredsløbet og spændingsfaldet over belastningen. Disse ændringer kan påvises. Problemet er, at belastningsmodstanden bliver kritisk. Hvis den er for stor, vil ændringen i strømmen, når en metalgenstand dukker op, være relativt lille. Dette reducerer systemets følsomhed og immunitet. Hvis den er lille, vil strømmen i kredsløbet være høj, og der vil være behov for en mere modstandsdygtig sensor.
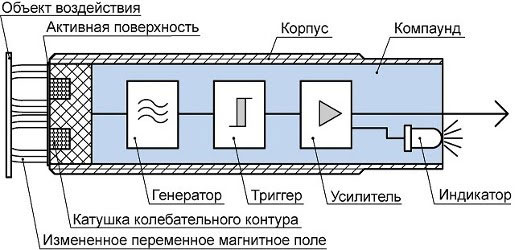
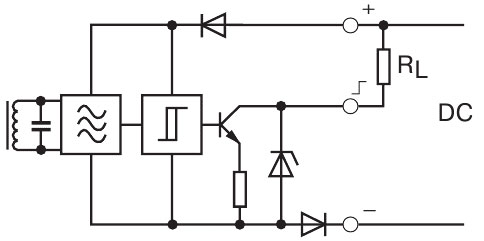
Derfor findes der konstruktioner, hvor sensorkredsløbet er indbygget i sensorhuset. En generator genererer impulser, som forsyner spolen. Når et bestemt niveau er nået, aktiveres en udløser, der skifter fra tilstand 0 til 1 eller omvendt. En bufferforstærker forstærker signalet med hensyn til effekt og/eller spænding, tænder (slukker) LED'en og udsender et diskret signal til det eksterne kredsløb.
Udgangssignalet kan genereres:
- ved hjælp af en elektromagnetisk eller solid state relæ - nul- eller enhedsspændingsniveau;
- "tør kontakt" elektromagnetisk relæ;
- åben samler transistor (n-p-n- eller p-n-p-strukturer).
I dette tilfælde kræves der tre ledninger til at forbinde sensoren:
- strømforsyning;
- fælles ledning (0 volt);
- signaltråd.
Sådanne sensorer kan også forsynes med jævnspænding. Deres induktansimpulser genereres af en intern oscillator.
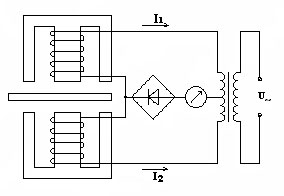
Differentialsensorer anvendes til positionsovervågning. Hvis den genstand, der skal overvåges, er symmetrisk i forhold til begge spoler, er strømmen gennem begge spoler den samme. Hvis en af spolerne er spændt mod feltet, opstår der ubalance, og den samlede strøm er ikke længere nul, hvilket kan registreres ved hjælp af en indikator med en pil i midten af skalaen. Indikatoren kan bruges til at bestemme både størrelsen af forskydningen og dens retning. Der kan anvendes et kontrolkredsløb i stedet for en måler til at give et signal, når der modtages oplysninger om en ændring i positionen, og til at træffe foranstaltninger til at justere objektet, foretage proceskorrektioner osv.

Sensorer baseret på princippet om lineært regulerede differentialtransformere fremstilles som komplette enheder bestående af en ramme med primære og sekundære viklinger og en stang, der bevæger sig indeni (den kan være fjederbelastet). Ledningerne til generatorsignalet og EMF'en fra de sekundære viklinger er forbundet til ydersiden. Den genstand, der skal styres, kan være mekanisk forbundet med skaftet. Den kan også være fremstillet af dielektrisk materiale - kun stilkens position er relevant for målingen.
På trods af visse ulemper i sig selv lukker den induktive sensor mange områder i forbindelse med berøringsfri detektion af objekter i rummet. På trods af den konstante teknologiske udvikling vil denne type udstyr ikke forlade markedet for måleudstyr inden for en overskuelig fremtid, fordi dets funktion er baseret på fysikkens grundlæggende love.
Relaterede artikler: