En differentiel proportional-integral regulator er en anordning, der installeres i automatiske systemer for at opretholde en given parameter, der kan ændres.
Det er forvirrende ved første øjekast, men det er også muligt at forklare PID-regulering for dummies, dvs. personer, der ikke er helt fortrolige med elektroniske systemer og apparater.
Indhold
Hvad er en PID-regulator?
En PID-regulator er en enhed, der er integreret i reguleringskredsløbet med obligatorisk feedback. Den er designet til at opretholde et sætpunktsniveau, f.eks. lufttemperaturen.
Enheden leverer et styresignal eller udgangssignal til controlleren på grundlag af de data, der er modtaget fra sensorer eller sendere. Regulatorerne har en høj transient nøjagtighed og en høj kvalitet af ydeevne.
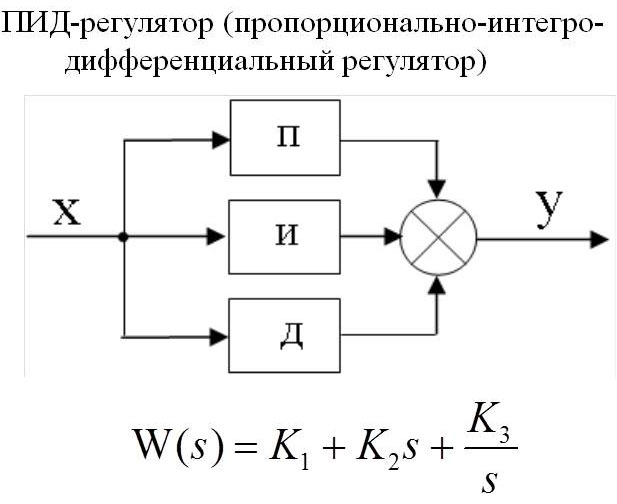
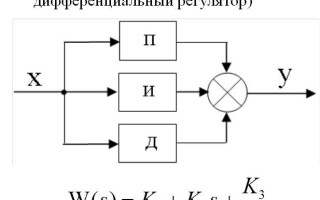
Tre koefficienter i PID-regulatoren og funktionsprincip
PID-regulatoren har til opgave at levere et udgangssignal for den effekt, der er nødvendig for at holde den regulerede parameter på et forudbestemt niveau. Til beregning af værdien anvendes en kompleks matematisk formel, som omfatter 3 koefficienter - proportional, integral og differentiel.
Lad os tage en tank med vand som et kontrolobjekt, hvor det er nødvendigt at holde temperaturen på et givet niveau ved at regulere åbningsgraden af en dampventil.
Den proportionale komponent vises på det tidspunkt, hvor der er uoverensstemmelse med inputdataene. Enkelt sagt lyder det sådan her - forskellen mellem den faktiske temperatur og den ønskede temperatur tages, ganges med en justerbar koefficient og fås det udgangssignal, der skal anvendes på ventilen. Det vil sige, at så snart temperaturen er faldet, startes opvarmningsprocessen, og så snart den er steget over den ønskede temperatur, slukkes den eller køles endda ned.
Dernæst kommer den integrale komponent, som er designet til at kompensere for virkningerne af omgivelserne eller andre forstyrrende påvirkninger for at holde vores temperatur på det indstillede punkt. Da der altid er yderligere faktorer, der påvirker de apparater, der styres, ændrer tallet sig allerede, når dataene til beregning af den proportionale komponent kommer frem. Og jo større de eksterne påvirkninger er, jo større er udsvingene i figuren. Der opstår spring i strømforsyningen.
Den integrale komponent forsøger at returnere temperaturværdien på grundlag af tidligere værdier, hvis den er ændret. Processen er beskrevet mere detaljeret i videoen nedenfor.
Derefter tilføres regulatorens udgangssignal i henhold til koefficienten for at hæve eller sænke temperaturen. Med tiden vælges en værdi, der kompenserer for eksterne faktorer, og oversvømmelser forsvinder.
Integralet anvendes til at eliminere fejl ved at beregne den statiske fejl. Det vigtigste i denne proces er at vælge den korrekte koefficient, da fejlen (mismatch) ellers også vil påvirke den integrale komponent.
Den tredje PID-komponent er den differentielle komponent. Den er udformet til at kompensere for virkningerne af forsinkelser, der opstår mellem påvirkningen af systemet og tilbagemeldingen. Proportionalregulatoren leverer strøm, indtil temperaturen når den korrekte værdi, men der er altid fejl, når der sendes oplysninger til enheden, især ved høje værdier. Dette kan føre til overophedning. Differentialet forudser afvigelser som følge af forsinkelser eller miljøpåvirkninger og reducerer den leverede effekt på forhånd.
Opsætning af en PID-regulator
PID-regulatoren indstilles ved hjælp af to metoder:
- Syntese indebærer beregning af parametre på grundlag af systemmodellen. En sådan indstilling er præcis, men kræver et indgående kendskab til teori om automatisk styring. Det kan kun gøres af ingeniører og videnskabsmænd. Da det er nødvendigt at tage flowkarakteristika og foretage en masse beregninger.
- Den manuelle metode er baseret på forsøg og fejl. Dette gøres ved at tage data fra et allerede eksisterende system og foretage nogle justeringer af en eller flere reguleringskoefficienter. Efter tænding og observation af det endelige resultat ændres parametrene i den ønskede retning. Og så videre, indtil det ønskede præstationsniveau er nået.
Teoretiske analyse- og indstillingsmetoder anvendes sjældent i praksis på grund af manglende viden om kontrolobjektets egenskaber og en lang række mulige forstyrrende påvirkninger. Eksperimentelle metoder, der er baseret på observation af systemet, er mere almindelige.
Moderne automatiserede processer er implementeret som specialiserede moduler under kontrol af software til justering af reguleringskoefficienter.
Formålet med PID-regulatoren
PID-regulatoren er designet til at opretholde en bestemt værdi - temperatur, tryk, niveau i en tank, flow i en rørledning, koncentration af noget osv. - på et krævet niveau ved at ændre reguleringsvirkningen på aktuatorer, f.eks. automatiske reguleringsventiler, ved hjælp af proportionale, integrerende og differentierende værdier til indstilling.
Formålet med applikationen er at opnå et præcist styresignal, som kan styre store anlæg og endda kraftværksreaktorer.
Eksempel på et temperaturreguleringskredsløb
PID-regulatorer anvendes ofte til temperaturstyring, og lad os tage et simpelt eksempel på opvarmning af vand i en tank som et eksempel på denne automatiske proces.
Tanken er fyldt med væske, som skal opvarmes til den ønskede temperatur og holdes på det ønskede niveau. Der er en temperaturføler inde i tanken - et termokobbel termokobling eller modstandstermometer og er direkte forbundet med PID-regulatoren.
Vi leverer damp til opvarmning af væsken, som vist i illustrationen nedenfor, med den automatiske reguleringsventil. Selve ventilen modtager et signal fra styringen. Operatøren indtaster den temperaturindstillingsværdi i PID-regulatoren, der skal opretholdes i tanken.

Hvis styringens koefficienter er forkerte, vil vandtemperaturen springe, og ventilen vil være helt åben og helt lukket. I dette tilfælde skal PID-koefficienterne beregnes og indtastes igen. Hvis det gøres korrekt, vil systemet efter kort tid udligne sig, og temperaturen i tanken vil blive opretholdt på den indstillede temperatur med åbningsgraden af reguleringsventilen i midterpositionen.
Relaterede artikler: