Modulation är en icke-linjär elektrisk process där parametrarna för en signal (bärare) ändras av en annan signal (modulering, information). Inom kommunikationsteknik används frekvens-, amplitud- och fasmodulation i stor utsträckning. Inom kraftelektronik och mikroprocessorteknik blir pulsbreddsmodulering allt vanligare.
Innehåll
Vad är PWM (Pulse Width Modulation)?
Vid pulsbreddsmodulering förblir amplitud, frekvens och fas i den ursprungliga signalen oförändrad. Varaktigheten (bredden) av den kvadratiska pulsen påverkas av informationssignalen. I engelsk teknisk litteratur används förkortningen PWM - pulsbreddsmodulering.
Principen för PWM:s funktionssätt
En pulsbreddsmodulerad signal bildas på två sätt:
- analogt;
- digital.
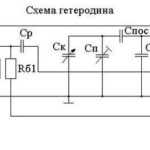
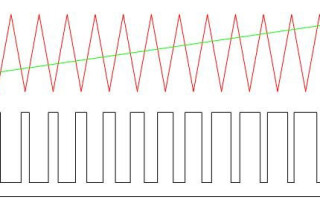
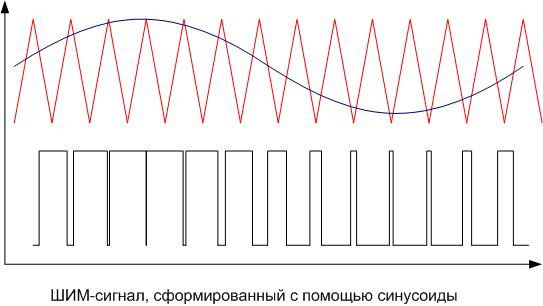
I den analoga PWM-genereringsmetoden matas en bärsignal i form av en sågtands- eller triangulär vågform till den inverterande ingång till komparatornoch informationssignalen läggs på den icke-inverterande ingången till komparatorn. Om den momentana bärarenivån är högre än den modulerande signalen är komparatorutgången noll, om den är lägre är den ett. Utgången är en diskret signal med en frekvens som motsvarar frekvensen för bärtriangeln eller sågtanden och en pulslängd som är proportionell mot den modulerande spänningsnivån.
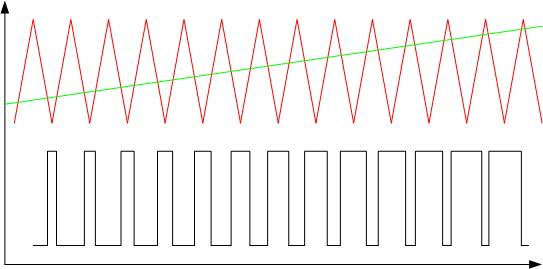
Som exempel visas pulsbreddsmodulering av en triangulär signal med en linjär stigande puls. Varaktigheten av utgångspulserna är proportionell mot nivån på utgångssignalen.
Analoga PWM-regulatorer finns också som integrerade kretsar som innehåller en komparator och en krets för att generera bärare. Det finns ingångar för anslutning av externa frekvenskodare och informationssignalen. Utgången används för att driva kraftfulla externa brytare. Det finns också återkopplingsingångar för att upprätthålla de inställda styrparametrarna. Detta är till exempel fallet med TL494-chipet. PWM-regulatorer med interna brytare finns tillgängliga för tillämpningar med relativt låg förbrukningseffekt. Den interna omkopplaren i LM2596 är konstruerad för strömmar på upp till 3 ampere.
Den digitala metoden används med hjälp av specialiserade chip eller mikroprocessorer. Pulslängden styrs av ett internt program. Många mikrokontroller, inklusive populära PIC och AVR, har en inbyggd modul för implementering av PWM i maskinvara. För att få PWM-signalen är det nödvändigt att aktivera modulen och ställa in dess driftsparametrar. Om det inte finns någon sådan modul kan PWM arrangeras enbart med hjälp av mjukvarumetoden, det är inte svårt. Denna metod ger fler möjligheter och större frihet tack vare flexibel användning av utgångar, men kräver mer resurser av regulatorn.
PWM-signalens egenskaper
De viktiga egenskaperna hos PWM-signalen är:
- amplitud (U);
- frekvens (f);
- Arbetscykel (S) eller fyllnadsfaktor D.
Amplituden i volt ställs in i enlighet med belastningen. Den måste säkerställa den nominella matningsspänningen till konsumenten.
Frekvensen för den pulsbreddsmodulerade signalen väljs utifrån följande överväganden:
- Ju högre frekvens, desto högre reglernoggrannhet.
- Frekvensen får inte vara lägre än svarstiden för den enhet som styrs med PWM, annars blir det märkbara krusningar i den styrda parametern.
- Ju högre frekvens, desto högre är kopplingsförlusterna. Detta beror på att nyckelns växlingstid är begränsad. I det låsta tillståndet faller hela matningsspänningen över nyckelelementet, men det finns nästan ingen ström. I öppet läge strömmar den fulla belastningsströmmen genom nyckeln, men spänningsfallet är litet eftersom genomgångsmotståndet är några få ohm. I båda fallen är energiförlusten försumbar. Övergången från ett tillstånd till ett annat sker snabbt, men inte omedelbart. Under öppnings- och stängningsförloppet faller en hög spänning på det delvis öppna elementet och samtidigt strömmar en betydande ström genom elementet. Under denna tid når strömförbrukningen höga värden. Denna period är kort och nyckeln hinner inte värmas upp ordentligt. Men när frekvensen ökar blir det fler sådana tidsintervaller per tidsenhet och värmeförlusten ökar. Därför är det viktigt att använda snabbverkande element när man bygger nycklar.
- När du kontrollerar en motorer Frekvensen måste ligga utanför det område där det finns mänskligt läsbara frekvenser - 25 kHz och högre. Detta beror på att en lägre kopplingsfrekvens resulterar i ett obehagligt visslande ljud.
Dessa krav står ofta i strid med varandra, så valet av frekvens är i vissa fall en kompromiss.
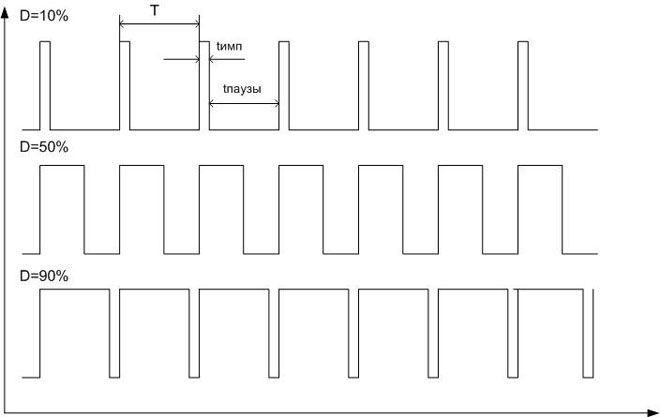
Modulationsvärdet kännetecknas av arbetscykeln. Eftersom pulsrepetitionsfrekvensen är konstant, är också periodlängden konstant (T=1/f). En period består av en puls och en paus, som har en varaktighet på timp och tpaus, där timp+tpaus=Т. Förhållandet är förhållandet mellan pulsens varaktighet och perioden - S=timp/T. Men i praktiken visade det sig vara lämpligare att använda det omvända värdet - fyllnadsfaktor: D=1/S=T/t.imp.. Det är ännu bekvämare att uttrycka fyllnadsgraden i procent.
Vad är skillnaden mellan PWM och PWM?
I utländsk facklitteratur görs ingen åtskillnad mellan pulsbreddsmodulering och pulsbreddstyrning (PWM). Ryska experter försöker skilja dessa begrepp åt. PWM är faktiskt en typ av modulering, dvs. en förändring av bärarsignalen under påverkan av en annan modulerande signal. Bärarsignalen fungerar som en bärare och den modulerande signalen anger informationen. Pulsbreddskontroll är reglering av belastningsläget med hjälp av PWM.
Orsaker och tillämpningar för PWM
Principen för pulsbreddsmodulering används i Hastighetsreglering för högeffektiva induktionsmotorer. I detta fall genereras en moduleringssignal med kontrollerad frekvens (enfasig eller trefasig) med hjälp av en sinusvågsgenerator med låg effekt och överlagras analogt på bäraren. Utgången är en PWM-signal som matas till effektbehovsknapparna. Den resulterande pulssekvensen kan sedan passera genom ett lågpassfilter, t.ex. en enkel RC-kedja, och den ursprungliga sinusvågen kan extraheras. Eller så kan du klara dig utan den - filtrering kommer att ske naturligt på grund av motorns tröghet. Ju högre bärfrekvensen är, desto mer ligger utgångsvågformen nära den ursprungliga sinusformen.
En naturlig fråga uppstår - varför kan inte oscillatorsignalen förstärkas på en gång, till exempel, Användning av transistorer med hög effekt.? Eftersom reglerelementet, som arbetar i linjärt läge, kommer att omfördela strömmen mellan belastningen och omkopplaren. Detta leder till att mycket kraft slösas bort på nyckelelementet. Om däremot ett kraftfullt reglerelement fungerar i nyckelläge (trinistor, triac, RGBT-transistor) fördelas effekten över tiden. Förlusterna blir mycket lägre och effektiviteten mycket högre.
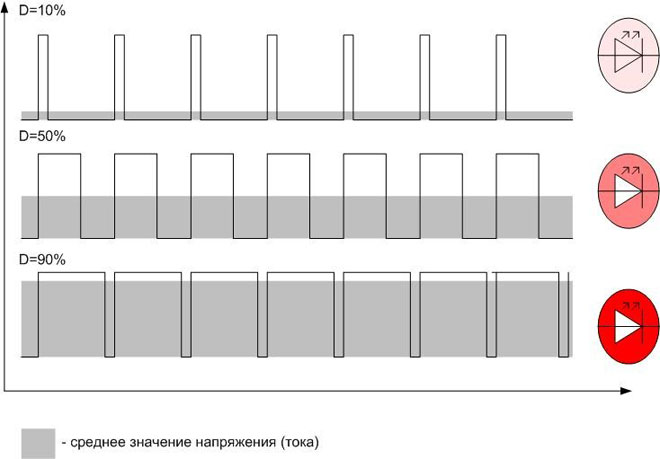
I digital teknik finns det inget särskilt alternativ till pulsbreddstyrning. Signalamplituden är konstant där, spänning och ström kan endast ändras genom att modulera bärarpulsens bredd och därefter medelvärdesbilda den. Därför används PWM för spännings- och strömstyrning i tillämpningar där pulssignalen kan medelvärdesbildas. Medelvärdeberäkningen kan göras på olika sätt:
- Genom lastens tröghet. Den termiska trögheten hos termoelektriska värmare och glödlampor gör till exempel att de reglerade föremålen inte svalnar märkbart i pauserna mellan pulserna.
- På grund av trögheten i uppfattningen. En lysdiod lyser från puls till puls, men det mänskliga ögat märker inte detta utan uppfattar det som ett konstant sken med varierande intensitet. Denna princip används för att styra ljusstyrkan hos LED-punkterna. Men några hundra hertz av omärklig blinkning är fortfarande närvarande och orsakar trötthet i ögonen.
- På grund av mekanisk tröghet. Den här egenskapen används för styrning av DC-kollektormotorer. Med rätt styrfrekvens hinner motorn inte stanna i dödtidspauserna.
Därför används PWM när det genomsnittliga spännings- eller strömvärdet spelar en avgörande roll. Förutom de vanliga fall som nämns ovan reglerar PWM-metoden medelströmmen i svetsmaskiner och batteriladdare osv.
Om naturlig medelvärdesbildning inte är möjlig kan denna roll i många fall övertas av det redan nämnda lågpassfiltret (LPF) i form av en RC-kedja. För praktiska ändamål räcker detta, men man bör vara medveten om att det är omöjligt att separera originalsignalen från PWM-signalen med en LPF utan att det uppstår distorsion. PWM-spektrumet innehåller trots allt ett oändligt stort antal övertoner, som oundvikligen kommer att hamna inom filterets bandbredd. Låt dig alltså inte luras av formen på den rekonstruerade sinusformen.
PWM-styrning av en RGB-lysdiod är mycket effektiv och ändamålsenlig. Denna anordning har tre p-n-övergångar - röd, blå och grön. Genom att variera ljusstyrkan för varje kanal separat kan nästan vilken LED-färg som helst (utom rent vitt) uppnås. Möjligheterna att skapa ljuseffekter med PWM är oändliga.
Den vanligaste tillämpningen för en digital pulsbreddsmodulerad signal är att styra den genomsnittliga strömmen eller spänningen som flödar genom en belastning. Men det är också möjligt att använda denna typ av modulering på okonventionella sätt. Allt beror på designerns fantasi.
Relaterade artiklar: