En differentiell proportionell-integral regulator är en anordning som installeras i automatiska system för att upprätthålla en given parameter som kan ändras.
Det är förvirrande vid första anblicken, men det är möjligt att förklara PID-reglering även för dummies, dvs. personer som inte är helt bekanta med elektroniska system och apparater.
Innehåll
Vad är en PID-regulator?
En PID-regulator är en enhet som integreras i styrkretsen med obligatorisk återkoppling. Den är utformad för att upprätthålla inställda nivåer, t.ex. lufttemperaturen.
Enheten ger en styrsignal eller en utsignal till styrenheten, baserat på de data som tas emot från sensorer eller sändare. Regulatorerna har en hög transient noggrannhet och hög kvalitet på prestandan.
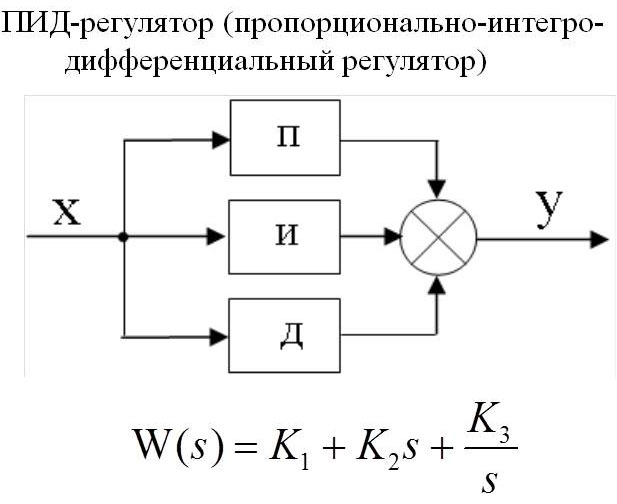
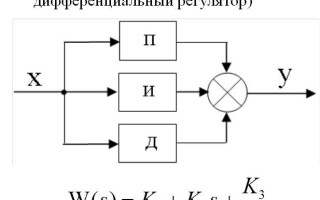
Tre koefficienter för PID-regulatorn och funktionsprincipen
PID-regulatorn har till uppgift att ge en utsignal om den effekt som krävs för att hålla den reglerade parametern på en förutbestämd nivå. En komplex matematisk formel används för att beräkna indikatorn, som innehåller tre koefficienter - proportionell, integral och differentiell.
Låt oss ta en tank med vatten som ett kontrollobjekt, där det är nödvändigt att hålla temperaturen på en viss nivå genom att reglera öppningsgraden för en ångventil.
Den proportionella komponenten uppträder i det ögonblick då den inte stämmer överens med de inmatade uppgifterna. Enkelt uttryckt låter det så här - skillnaden mellan den faktiska temperaturen och den önskade temperaturen tas, multipliceras med en justerbar koefficient och den utsignal som ska tillföras ventilen erhålls. Med andra ord startar uppvärmningen så snart temperaturen sjunker, och så snart den har stigit över den önskade temperaturen stängs den av eller kyls till och med ner.
Därefter kommer den integrerade komponenten, som är utformad för att kompensera effekterna av miljön eller andra störande influenser för att hålla vår temperatur på börvärdet. Eftersom det alltid finns ytterligare faktorer som påverkar de apparater som styrs, ändras siffran redan när uppgifterna för att beräkna den proportionella komponenten kommer in. Och ju större de yttre influenserna är, desto större är fluktuationerna i figuren. Det förekommer hopp i kraftförsörjningen.
Den integrerade komponenten försöker återge temperaturvärdet baserat på tidigare värden, om det har ändrats. Processen beskrivs närmare i videon nedan.
Därefter matas regulatorns utsignal i enlighet med koefficienten för att höja eller sänka temperaturen. Med tiden väljs ett värde som kompenserar för externa faktorer och överskott försvinner.
Integralen används för att eliminera fel genom att beräkna det statiska felet. Det viktigaste i denna process är att välja rätt koefficient, annars kommer felet (missanpassningen) också att påverka den integrala komponenten.
Den tredje PID-komponenten är den differentiella komponenten. Den är utformad för att kompensera effekterna av de fördröjningar som uppstår mellan påverkan på systemet och återkopplingen. Den proportionella regulatorn levererar ström tills temperaturen når rätt värde, men det finns alltid fel när informationen överförs till enheten, särskilt vid höga värden. Detta kan leda till överhettning. Differentialen förutser avvikelser som orsakas av förseningar eller miljöpåverkan och minskar den tillförda effekten i förväg.
Inställning av en PID-regulator
PID-regulatorn ställs in med två metoder:
- Syntesen innebär att parametrar beräknas utifrån systemmodellen. En sådan inställning är noggrann, men kräver en grundlig kunskap om teorin för automatisk styrning. Det kan bara göras av ingenjörer och vetenskapsmän. Eftersom det är nödvändigt att ta flödesegenskaper och göra många beräkningar.
- Den manuella metoden bygger på försök och misstag. Detta görs genom att ta data från ett redan befintligt system och göra vissa justeringar av en eller flera reglerkoefficienter. Efter att ha slagit på och observerat slutresultatet ändras parametrarna i önskad riktning. Och så vidare tills den önskade prestandanivån har uppnåtts.
Teoretiska analys- och avstämningsmetoder används sällan i praktiken på grund av bristande kunskap om kontrollobjektets egenskaper och en mängd möjliga störande influenser. Experimentella metoder som bygger på observation av systemet är vanligare.
Moderna automatiserade processer implementeras som specialiserade moduler som styrs av programvara för att justera reglerkoefficienter.
Syftet med PID-regulatorn
PID-regulatorn är utformad för att hålla ett visst värde - temperatur, tryck, nivå i en tank, flöde i en rörledning, koncentration av något etc. - på en önskad nivå genom att ändra styrningen av manöverdon, t.ex. automatiska reglerventiler, med hjälp av proportionella, integrerande och differentierande värden för dess inställning.
Syftet med tillämpningen är att få en exakt styrsignal som kan styra stora anläggningar och till och med kraftverksreaktorer.
Exempel på en temperaturregleringskrets
PID-regulatorer används ofta för temperaturreglering, låt oss ta ett enkelt exempel på uppvärmning av vatten i en tank som ett exempel på denna automatiska process.
Tanken fylls med vätska som ska värmas till önskad temperatur och hållas på önskad nivå. Det finns en temperatursensor i tanken - ett termoelement. Termokoppling eller . motståndstermometer och är direkt ansluten till PID-regulatorn.
Vi levererar ånga för att värma vätskan, enligt illustrationen nedan, med den automatiska styrventilen. Själva ventilen tar emot en signal från styrenheten. Operatören matar in det temperaturinställningsvärde i PID-regulatorn som ska bibehållas i tanken.

Om styrenhetens koefficienter är felaktiga kommer vattentemperaturen att hoppa och ventilen kommer att vara helt öppen och helt stängd. I detta fall måste PID-koefficienterna beräknas och anges på nytt. Om det görs på rätt sätt kommer systemet efter en kort tid att jämna ut sig och temperaturen i tanken kommer att bibehållas på den inställda temperaturen, med styrventilens öppningsgrad i mittenläget.
Relaterade artiklar: