En sensor är i allmänhet en anordning som omvandlar en fysisk kvantitet till en annan som kan bearbetas, överföras eller omvandlas. Den första är vanligtvis en fysisk kvantitet som inte kan mätas direkt (temperatur, hastighet, förskjutning osv.), medan den andra är en elektrisk eller optisk signal. Sensorer, vars grundelement är induktansspolen, har sin egen nisch inom området mätinstrument.
Om
Hur induktiva sensorer är utformade och hur de fungerar
Induktiva sensorer är aktiva, dvs. de kräver en extern oscillator. Detta genererar en signal med en definierad frekvens och amplitud i spolen.
Strömmen som flyter genom spolarna skapar ett magnetfält. Om ett ledande föremål kommer in i magnetfältet ändras spolens parametrar. Allt som återstår är att upptäcka denna förändring.
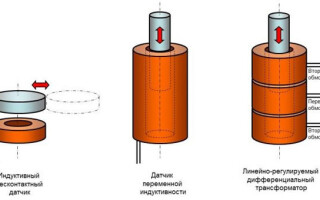
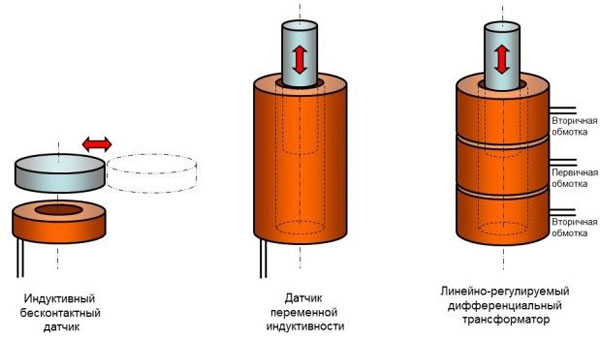
Enkla beröringsfria sensorer reagerar på närvaron av metallföremål i spolens närfält. Detta ändrar spolens impedans, och denna förändring måste omvandlas till en elektrisk signal som förstärks och/eller detekteras av en jämförelsekrets.
En annan typ av sensor reagerar på förändringar i den längsgående positionen hos ett föremål som fungerar som spolkärna. När föremålets position ändras glider det in eller ut ur spolen och ändrar därmed dess induktans. Denna förändring kan omvandlas till en elektrisk signal och mätas. En annan version av denna sensor är att ett föremål trycks in på spolen utifrån. Detta orsakar en minskning av induktansen på grund av avskärmningseffekten.
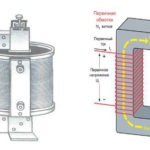
En annan version av induktiv förskjutningssensor är den linjära variabla differentialtransformatorn (LVDT). Det är en sammansatt spole som tillverkas i följande ordning:
- sekundärspole 1;
- primärlindning;
- sekundärlindning 2.
Signalen från generatorn läggs på den primära lindningen. Det magnetfält som skapas av den mellersta spolen inducerar en EMF i var och en av de sekundära spolarna (transformatorprincipen).Transformatorprincip). När kärnan rör sig förändras den ömsesidiga kopplingen mellan spolarna, vilket förändrar den elektromotoriska kraften i var och en av lindningarna. Denna förändring kan upptäckas av mätkretsen. Eftersom kärnans längd är mindre än den totala längden på den sammansatta spolen kan förhållandet mellan EMF i de sekundära lindningarna entydigt bestämma föremålets position.
En roterande kodare bygger på samma princip om att ändra den induktiva kopplingen mellan lindningarna. Den består av två koaxialspolar. Signalen läggs på en av lindningarna, EMF i den andra lindningen beror på den ömsesidiga rotationsvinkeln.
Det är uppenbart från funktionsprincipen att induktiva sensorer, oavsett utformning, är kontaktlösa sensorer. De fungerar på distans och kräver ingen direkt kontakt med det objekt som ska övervakas.
Fördelar och nackdelar med induktiva sensorer
Fördelarna med induktiva sensorer är främst följande
- Robust konstruktion;
- inga kontaktförbindelser;
- hög utgångseffekt, vilket minskar påverkan av brus och förenklar styrkretsen;
- hög känslighet;
- Möjlighet till drift med växelström med industriell frekvens.
De största nackdelarna med induktiva sensorer är deras storlek, vikt och komplexitet. Det krävs särskild utrustning för att linda spolarna med de parametrar som krävs. En annan nackdel är att amplituden på signalen från huvudoscillatorn måste bibehållas exakt. Känslighetsområdet ändras också när signalamplituden ändras. Eftersom sensorerna endast arbetar med växelström blir det ett tekniskt problem att upprätthålla amplituden. Det är inte möjligt att ansluta sensorn direkt (eller via en nedtrappningstransformator) till ett hushålls- eller industriellt nät, där spänningsvariationer i amplitud eller frekvens kan vara upp till 10 %, även vid normal drift, vilket gör mätnoggrannheten oacceptabel.
Mätnoggrannheten kan också påverkas av:
- Externa magnetfält (det är inte möjligt att skärma av sensorn på grund av dess funktionsprincip);
- sidoEMF-induktioner i matnings- och mätkablarna.
- tillverkningsfel;
- Fel i sensorkaraktären;
- Bakslag eller deformationer vid sondens monteringsplats som inte påverkar den allmänna prestandan;
- Noggrannhetens temperaturberoende (lindningstrådens parametrar, inklusive dess motstånd, ändras).
Induktanssensorernas oförmåga att reagera på närvaron av dielektriska föremål i deras magnetfält kan anses vara både en fördel och en nackdel. Å ena sidan begränsar detta användningsområdet. Å andra sidan gör det dem okänsliga för smuts, fett, sand etc. på de övervakade objekten.
Genom att förstå de induktiva sensorernas begränsningar och möjliga begränsningar kan fördelarna med induktiva sensorer utnyttjas på ett rationellt sätt.
Användningsområden för induktiva sensorer
Induktiva närvarokontakter används ofta som gränskontroller. Dessa anordningar används för en mängd olika tillämpningar:
- i säkerhetssystem som sensorer för obehörig öppning av fönster och dörrar;
- I telekontrollsystem som sensorer för gränsvärden för montering och mekanismer;
- i vardagen i indikeringssystem för stängda dörrar och fönsterkarmar;
- för att räkna föremål (t.ex. som rör sig på ett transportband);
- För att bestämma rotationshastigheten hos kugghjul (varje tand som passerar sensorn genererar en puls);
- I andra situationer.

Vinkelpositionskodare kan användas för att bestämma rotationsvinklar för axlar, kugghjul och andra roterande enheter, och även som absoluta kodare. De kan också användas i verktygsmaskiner och robotiktillämpningar tillsammans med linjära givare. Överallt där det är nödvändigt att känna till maskinkomponenternas exakta position.
Praktiska tillämpningar för induktiva givare
I praktiken kan induktiva sensorer utformas på många olika sätt. Den enklaste konstruktionen och användningen är en enkel sensor med två trådar som övervakar närvaron av metallföremål inom dess avkänningsområde. Dessa enheter tillverkas ofta på grundval av en W-formad kärna, men detta är inte avgörande. Denna konstruktion är lättare att tillverka.
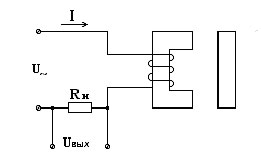
När spolmotståndet ändras ändras strömmen i kretsen och spänningsfallet över belastningen. Dessa förändringar kan upptäckas. Problemet är att belastningsmotståndet blir kritiskt. Om den är för stor kommer strömförändringen när ett metallföremål dyker upp att vara relativt liten. Detta minskar systemets känslighet och immunitet. Om den är liten blir strömmen i kretsen hög och en mer motståndskraftig givare krävs.
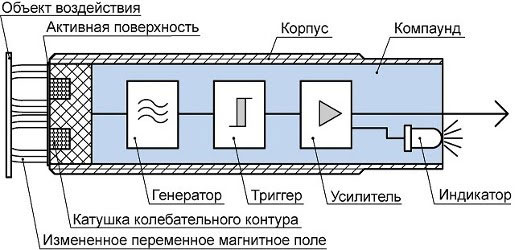
Av denna anledning finns det konstruktioner där detekteringskretsen är inbyggd i sensorns hölje. En generator genererar pulser som matar induktorspolen. När en viss nivå uppnås aktiveras en utlösare, vilket innebär att statusen övergår från 0 till 1 eller vice versa. En buffertförstärkare förstärker signalen i form av effekt och/eller spänning, tänder (släcker) lysdioden och ger ut en diskret signal för den externa kretsen.
Utsignalen kan genereras:
- med hjälp av en elektromagnetisk eller faststadsrelä - noll eller enhetlig spänningsnivå;
- "torrkontakt" Elektromagnetiskt relä.;
- öppen samlare transistor (n-p-n- eller p-n-p-strukturer).
I det här fallet krävs tre ledningar för att ansluta sensorn:
- strömförsörjning;
- gemensam tråd (0 volt);
- signalledning.
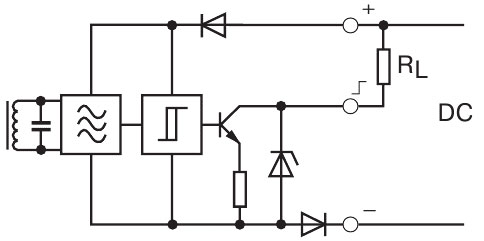
Sådana sensorer kan också drivas med likspänning. Deras induktionsimpulser genereras av en intern oscillator.
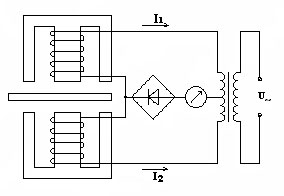
Differentialsensorer används för positionsövervakning. Om det föremål som ska övervakas är symmetriskt i förhållande till båda spolarna är strömmen genom båda spolarna densamma. Om någon av spolarna är riktad mot fältet uppstår obalans, den totala strömmen är inte längre noll, vilket kan upptäckas av en indikator med en pil i mitten av skalan. Indikatorn kan användas för att bestämma både storleken på förskjutningen och dess riktning. En styrkrets kan användas i stället för en mätskiva för att ge en signal när information om en positionsförändring tas emot, vidta åtgärder för att rikta in objektet, göra processkorrigeringar osv.

Sensorer som bygger på principen om linjärt reglerade differentialtransformatorer tillverkas som kompletta enheter som består av en ram med primära och sekundära lindningar och en stång som rör sig inuti (den kan vara fjäderbelastad). Ledningarna för generatorsignalen och sekundärlindningarnas EMF är anslutna till utsidan. Objektet som ska styras kan vara mekaniskt kopplat till stammen. Den kan också vara tillverkad av dielektriskt material - det är bara stammens position som är relevant för mätningen.
Trots vissa inneboende nackdelar kan den induktiva sensorn användas på många områden som rör beröringsfri detektering av föremål i rymden. Trots den ständiga teknikutvecklingen kommer denna typ av anordning inte att lämna marknaden för mätinstrument inom en överskådlig framtid, eftersom dess funktion bygger på fysikens grundläggande lagar.
Relaterade artiklar: