A modulação é um processo eléctrico não linear no qual os parâmetros de um sinal (portador) são alterados por outro sinal (modulação, informação). Na engenharia das comunicações, a frequência, amplitude e modulação de fase são amplamente utilizadas. Na electrónica de potência e tecnologia de microprocessadores, a modulação por largura de pulso está a tornar-se mais comum.
Conteúdos
O que é PWM (Pulse Width Modulation)?
Na modulação por largura de pulso, a amplitude, frequência e fase do sinal original permanecem inalteradas. A duração (largura) do impulso quadrado é afectada pelo sinal de informação. Na literatura técnica inglesa é denotada pela abreviatura PWM - pulse-width modulation.
Princípio de funcionamento do PWM
O sinal modulado de largura de pulso é formado de duas maneiras:
- analógico;
- digital.
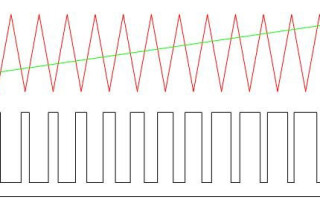
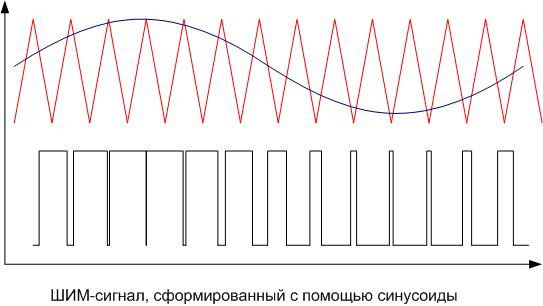
No método de geração analógica PWM, um sinal portador na forma de um dente de serra ou de onda triangular é alimentado ao inverso entrada do elemento de comparaçãoe o sinal de informação é aplicado à entrada não-invertente do elemento de comparação. Se o nível da portadora instantânea for superior ao sinal modulante, a saída do comparador é zero, se inferior é um. A saída é um sinal discreto com uma frequência correspondente à frequência do triângulo portador ou dente de serra, e um comprimento de impulso proporcional ao nível de tensão modulante.
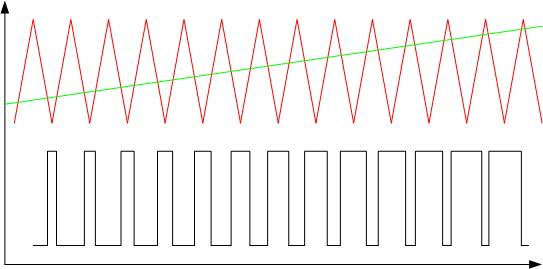
Como exemplo, a modulação da largura do impulso de um sinal triangular por um impulso linear ascendente é mostrada. A duração dos impulsos de saída é proporcional ao nível do sinal de saída.
Controladores PWM analógicos também estão disponíveis como circuitos integrados de prateleira que contêm um comparador e um circuito de geração de portadoras. Existem entradas para a ligação de elementos codificadores de frequência externos e o sinal de informação. A saída é utilizada para accionar interruptores externos potentes. Há também entradas de feedback para manter os parâmetros de controlo definidos. Este é o caso, por exemplo, do chip TL494. Os controladores PWM com interruptores internos estão disponíveis para aplicações com um poder de consumo relativamente baixo. O interruptor interno da LM2596 é concebido para correntes até 3 amperes.
O método digital é obtido utilizando chips ou microprocessadores especializados. O comprimento do pulso é controlado por um programa interno. Muitos microcontroladores, incluindo o popular PIC e AVR, têm um módulo de bordo para implementação de PWM de hardware. Para obter o sinal PWM é necessário activar o módulo e definir os seus parâmetros de funcionamento. Se não existir tal módulo, o PWM pode ser arranjado puramente por método de software, não é difícil. Este método dá mais possibilidades e proporciona mais liberdade devido à utilização flexível dos resultados, mas envolve mais recursos do controlador.
Características do sinal PWM
As características importantes do sinal PWM são:
- amplitude (U);
- frequência (f);
- Ciclo de trabalho (S) ou factor de enchimento D.
A amplitude em volts é definida de acordo com a carga. Deve assegurar a tensão nominal de fornecimento ao consumidor.
A frequência do sinal modulado por largura de pulso é escolhida a partir das seguintes considerações:
- Quanto maior for a frequência, maior será a precisão da regulação.
- A frequência não deve ser inferior ao tempo de resposta do dispositivo a ser controlado com PWM, caso contrário, haverá uma ondulação perceptível no parâmetro controlado.
- Quanto maior for a frequência, maiores serão as perdas de comutação. Isto deve-se ao facto de o tempo de troca da chave ser finito. No estado travado, toda a tensão de alimentação cai sobre o elemento chave, mas quase não há corrente. No estado aberto, a corrente de carga total passa através da chave, mas a queda de tensão é pequena, porque a resistência de passagem é unidades de ohms. Em ambos os casos, a dissipação de energia é insignificante. A transição de um estado para o outro é rápida, mas não instantânea. Durante o processo de fecho aberto, uma alta tensão cai sobre o elemento parcialmente aberto e, ao mesmo tempo, uma corrente considerável flui através do elemento. Durante este tempo, a dissipação de energia atinge valores elevados. Este período é curto e a chave não tem tempo para aquecer consideravelmente. Mas à medida que a frequência aumenta, há mais intervalos de tempo por unidade de tempo e a perda de calor aumenta. Por conseguinte, é importante utilizar elementos de acção rápida na construção de chaves.
- Ao controlar um motores a frequência tem de estar fora da gama de frequências legíveis pelo homem - 25kHz e acima. Isto porque frequências de comutação mais baixas provocam assobios incómodos.
Estes requisitos estão frequentemente em desacordo uns com os outros, pelo que a escolha da frequência é, em alguns casos, um compromisso.
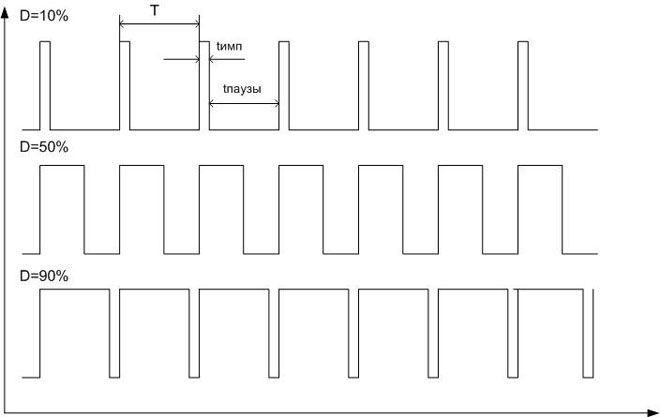
O valor da modulação é caracterizado pelo ciclo de funcionamento. Como a taxa de repetição de impulsos é constante, a duração do período é também constante (T=1/f). Um período consiste num impulso e numa pausa, que têm uma duração de timp e tpausaonde timp+tpausa=Т. A razão é a razão entre a duração do pulso e o período - S=timp/T. Mas na prática revelou-se mais conveniente utilizar o valor inverso - factor de preenchimento: D=1/S=T/timp.. É ainda mais conveniente expressar o factor de preenchimento como uma percentagem.
Qual é a diferença entre PWM e PWM
Não há distinção entre modulação de largura de pulso e controlo de largura de pulso (PWM) na literatura técnica estrangeira. Os peritos russos estão a tentar distinguir estes conceitos. De facto, PWM é um tipo de modulação, ou seja, mudar o sinal portador sob a influência de outro sinal, modulador. O sinal portador actua como um portador de informação e o sinal modulador define esta informação. E o controlo da largura de pulso é a regulação do modo de carga por meio de PWM.
Razões e aplicações para PWM
O princípio da modulação por largura de pulso é utilizado em Controladores de velocidade para motores assíncronos potentes. Neste caso, um sinal de frequência variável modulante (monofásico ou trifásico) é gerado utilizando um gerador de onda sinusoidal de baixa potência e sobreposto ao transportador de forma analógica. A saída é um sinal PWM que é alimentado às teclas de procura de energia. A sequência de impulsos resultante pode então ser passada através de um filtro passa-baixo, por exemplo, uma simples cadeia RC, e a onda sinusoidal original pode ser extraída. Ou pode passar sem ele - a filtragem irá ocorrer naturalmente devido à inércia do motor. Obviamente, quanto maior for a frequência portadora, mais a forma de onda de saída se aproxima da sinusoidal original.
Levanta-se uma questão natural - porque não pode o sinal oscilador ser amplificado de uma só vez, por exemplo, utilizando transístores de alta potência? Porque o elemento regulador, operando em modo linear, irá redistribuir a potência entre a carga e o interruptor. Isto fará com que se desperdice muito poder sobre o elemento chave. Se, por outro lado, um poderoso elemento regulador estiver a funcionar em modo chave (trinistor, triac, transistor RGBT), a potência é distribuída ao longo do tempo. As perdas serão muito menores e a eficiência será muito maior.
Na tecnologia digital, não há alternativa particular ao controlo de largura de pulso. A amplitude do sinal é aí constante, a tensão e a corrente só podem ser alteradas através da modulação da largura do impulso portador e, subsequentemente, da sua média. Por conseguinte, o PWM é utilizado para controlo de tensão e corrente em aplicações que podem calcular a média do sinal de impulso. O cálculo da média é conseguido de várias maneiras:
- Através da inércia da carga. Por exemplo, a inércia térmica dos aquecedores termoeléctricos e das lâmpadas incandescentes significa que os objectos de controlo não arrefecem visivelmente entre os impulsos.
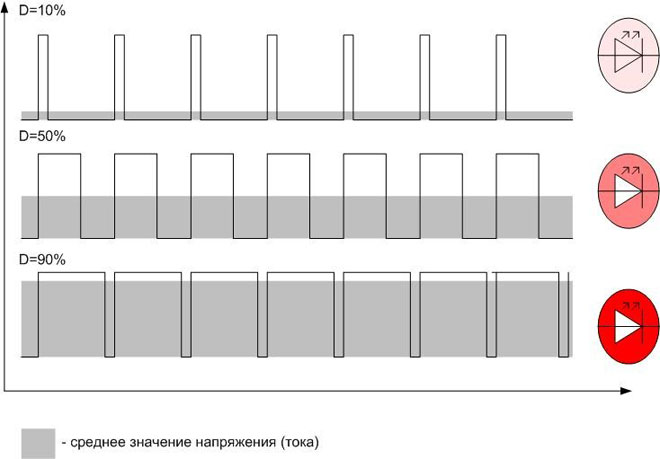
- Devido à inércia da percepção. Um LED acende-se de pulso em pulso, mas o olho humano não se apercebe disto e percebe-o como um brilho constante com intensidades variáveis. Este princípio é utilizado para controlar a luminosidade dos pontos LED. Mas algumas centenas de hertz de intermitência imperceptível ainda está presente e causa fadiga ocular.
- Devido à inércia mecânica. Esta propriedade é utilizada no controlo do motor de recolha DC. Com a frequência de controlo correcta, o motor não tem tempo para parar nas pausas do tempo morto.
Portanto, o PWM é utilizado onde a tensão média ou o valor da corrente desempenha um papel decisivo. Para além dos casos comuns acima mencionados, o método PWM regula a corrente média em máquinas de soldadura e carregadores de bateria, etc.
Se não for possível fazer uma média natural, em muitos casos este papel pode ser assumido pelo já mencionado filtro passa-baixo (LPF) sob a forma de uma cadeia RC. Para efeitos práticos isto é suficiente, mas deve ser entendido que é impossível separar o sinal original do PWM com um LPF sem distorção. Afinal, o espectro PWM contém um número infinitamente grande de harmónicos, que inevitavelmente cairão na largura de banda do filtro. Portanto, não tenha ilusões sobre a forma do sinusoide reconstruído.
O controlo PWM de um LED RGB é muito eficaz e eficiente. Este dispositivo tem três junções p-n - vermelho, azul e verde. Ao variar o brilho de cada canal separadamente, quase qualquer cor LED (excepto branco puro) pode ser alcançada. As possibilidades de criar efeitos de iluminação com PWM são infinitas.
A aplicação mais comum para um sinal digital modulado por PWM é controlar a corrente ou tensão média que flui através de uma carga. Mas também é possível utilizar este tipo de modulação de forma não convencional. Tudo depende da imaginação do designer.
Artigos relacionados: