Um sensor em termos gerais é um dispositivo que converte uma quantidade física em outra que pode ser processada, transmitida ou convertida. A primeira é normalmente uma quantidade física que não pode ser medida directamente (temperatura, velocidade, deslocamento, etc.), enquanto a segunda é um sinal eléctrico ou óptico. Os sensores, de que o elemento básico é a bobina de indutância, ocupam o seu próprio nicho no campo dos instrumentos de medição.
Sobre
Como os sensores indutivos são concebidos e como funcionam
Os sensores indutivos pelo seu princípio de funcionamento estão activos, ou seja, requerem um oscilador externo. Isto gera um sinal com uma frequência e amplitude definidas na bobina indutora.
A corrente que flui através das bobinas cria um campo magnético. Se um objecto condutor entrar no campo magnético, os parâmetros da bobina mudam. Tudo o que resta é detectar esta mudança.
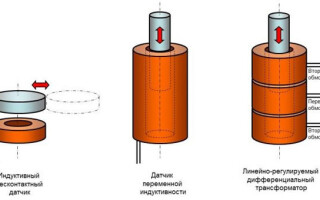
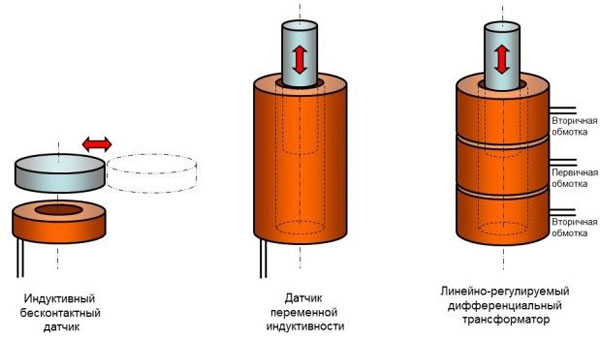
Os sensores simples sem contacto respondem à presença de objectos metálicos no campo próximo da bobina. Isto altera a impedância da bobina, esta alteração deve ser convertida num sinal eléctrico, amplificado e/ou detectado por um circuito de comparação.
Outro tipo de sensor responde a mudanças na posição longitudinal de um objecto que serve como núcleo da bobina. medida que a posição do objecto muda, este desliza para dentro ou para fora da bobina, alterando assim a sua indutância. Esta alteração pode ser convertida num sinal eléctrico e medida. Outra versão deste sensor é onde um objecto é empurrado para a bobina a partir do exterior. Isto provoca uma redução da indutância devido ao efeito de protecção.
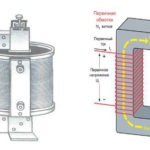
Outra versão do sensor de deslocamento indutivo é o Transformador Diferencial Linear Variável (LVDT). É uma bobina composta feita na seguinte ordem:
- bobina secundária 1;
- enrolamento primário;
- enrolamento secundário 2.
O sinal do gerador é aplicado ao enrolamento primário. O campo magnético criado pela bobina central induz um CEM em cada uma das bobinas secundárias (o princípio do transformador).princípio do transformador). O núcleo, ao mover-se, altera o acoplamento mútuo entre as bobinas, alterando a força electromotriz em cada um dos enrolamentos. Esta alteração pode ser detectada pelo circuito de medição. Como o comprimento do núcleo é inferior ao comprimento total da bobina composta, a relação do CEM nos enrolamentos secundários pode determinar sem ambiguidade a posição do objecto.
Um codificador rotativo baseia-se no mesmo princípio de alteração do acoplamento indutivo entre os enrolamentos. É constituído por duas bobinas coaxiais. O sinal é aplicado a um dos enrolamentos, o FME no segundo enrolamento depende do ângulo de rotação mútuo.
É óbvio pelo princípio de funcionamento que os sensores indutivos, independentemente da sua concepção, são sensores sem contacto. Funcionam à distância e não requerem contacto directo com o objecto a ser monitorizado.
Vantagens e desvantagens dos sensores indutivos
As vantagens dos sensores indutivos são principalmente
- Construção robusta;
- sem ligações de contacto;
- alta potência de saída, o que reduz a influência do ruído e simplifica o circuito de controlo;
- alta sensibilidade;
- Possibilidade de funcionamento com alimentação eléctrica AC de frequência industrial.
As principais desvantagens dos sensores indutivos são o seu tamanho, peso e complexidade. É necessário equipamento especial para enrolar as bobinas com os parâmetros necessários. Outra desvantagem é que a amplitude do sinal do oscilador mestre deve ser mantida com precisão. O intervalo de sensibilidade também muda à medida que a amplitude do sinal muda. Uma vez que os sensores só funcionam em corrente alternada, a manutenção da amplitude torna-se um problema técnico definido. Não é possível ligar o sensor directamente (ou por meio de um transformador de passo descendente) a uma rede eléctrica doméstica ou industrial, onde as variações de tensão em amplitude ou frequência podem chegar a 10%, mesmo em funcionamento normal, tornando a precisão da medição inaceitável.
A precisão da medição também pode ser afectada por:
- Campos magnéticos externos (a blindagem do sensor não é possível com base no seu princípio de funcionamento);
- induções laterais de CEM nos cabos de alimentação e medição
- inexactidões de fabrico;
- Erros na característica do sensor;
- Backlashes ou deformações no local de montagem da sonda que não afectam o desempenho geral;
- Dependência exacta da temperatura (os parâmetros do fio de enrolamento, incluindo a sua resistência, alteração).
A incapacidade dos sensores de indutância para responder à presença de objectos dieléctricos no seu campo magnético pode ser considerada tanto uma vantagem como uma desvantagem. Por um lado, isto limita a gama de aplicação. Por outro lado, torna-os insensíveis à sujidade, graxa, areia, etc. nos objectos monitorizados.
Através da compreensão das limitações e possíveis limitações dos sensores indutivos, as vantagens dos sensores indutivos podem ser racionalmente exploradas.
Campos de aplicação para sensores indutivos
Os interruptores de proximidade indutivos são frequentemente utilizados como interruptores de limite. Estes dispositivos são utilizados para uma grande variedade de aplicações:
- em sistemas de segurança como sensores para a abertura não autorizada de janelas e portas;
- em sistemas de telecontrolo como sensores de posição limite para montagens e mecanismos;
- na vida quotidiana em circuitos de indicação de posição fechada de portas, faixas;
- para a contagem de objectos (por exemplo, movendo-se sobre uma correia transportadora);
- para determinar a velocidade de rotação das engrenagens (cada dente que passa pelo sensor gera um impulso);
- Em outras situações.

Os codificadores de posição angular podem ser utilizados para determinar ângulos de rotação de veios, engrenagens e outras unidades rotativas, e também como codificadores absolutos. Podem também ser utilizados em máquinas-ferramentas e aplicações robóticas juntamente com codificadores lineares. Onde quer que seja necessário saber a posição exacta dos componentes da máquina.
Aplicações práticas para sensores indutivos
Na prática, os desenhos de sensores indutivos podem ser implementados de várias maneiras. A concepção e utilização mais simples é com um sensor único de dois fios que monitoriza a presença de objectos metálicos dentro da sua gama de detecção. Estes dispositivos são frequentemente feitos com base num núcleo em forma de W, mas este não é um ponto crucial. Este desenho é mais fácil de fabricar.
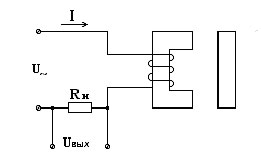
Quando a resistência da bobina muda, a corrente no circuito e a queda de tensão através da carga mudam. Estas alterações podem ser detectadas. O problema é que a resistência à carga se torna crítica. Se for demasiado grande, a mudança na corrente quando um objecto metálico aparece será relativamente pequena. Isto reduz a sensibilidade e a imunidade do sistema. Se for pequena, a corrente no circuito será elevada e será necessário um sensor mais resistente.
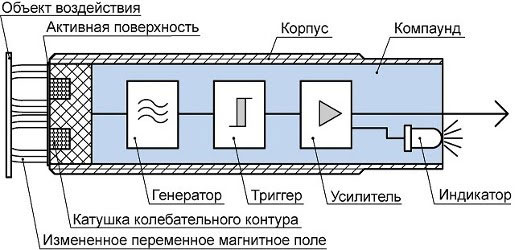
Por esta razão, existem desenhos onde o circuito de detecção é incorporado na caixa do sensor. Um gerador gera impulsos que alimentam a bobina indutora. Quando um certo nível é atingido, um gatilho é accionado, passando do estado 0 para 1 ou vice-versa. Um amplificador tampão amplifica o sinal em termos de potência e/ou tensão, ilumina (apaga) o LED e emite um sinal discreto para o circuito externo.
O sinal de saída pode ser gerado:
- por meio de uma sonda electromagnética ou relé de estado sólido - nível de tensão zero ou unidade;
- "contacto seco". relé electromagnético;
- colector aberto transistor (estruturas n-p-n ou p-n-p).
Neste caso, são necessários três fios para ligar o sensor:
- alimentação eléctrica;
- fio comum (0 volts);
- fio de sinal.
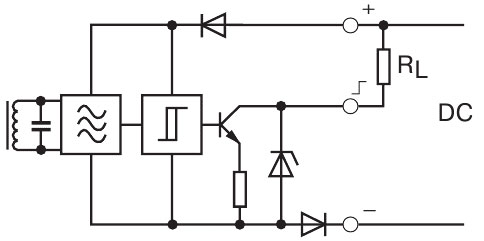
Tais sensores também podem ser alimentados a partir da tensão DC. Os seus impulsos de indutância são gerados por um oscilador interno.
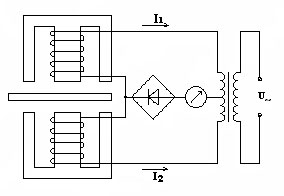
Os sensores diferenciais são utilizados para monitorização da posição. Se o objecto a ser monitorizado for simétrico em relação a ambas as bobinas, a corrente através de ambas as bobinas é a mesma. Se qualquer uma das bobinas estiver enviesada para o campo, o desequilíbrio ocorre, a corrente total já não é zero, o que pode ser detectado por um indicador com uma seta no meio da escala. O indicador pode ser utilizado para determinar tanto a magnitude do desvio como a sua direcção. Pode ser utilizado um circuito de controlo em vez de um medidor de marcação para fornecer um sinal quando é recebida informação sobre uma mudança de posição, tomar medidas para alinhar o objecto, fazer correcções no processo, etc.

Os sensores baseados no princípio dos transformadores diferenciais regulados linearmente são fabricados como construções completas, consistindo de uma estrutura com enrolamentos primários e secundários e uma haste que se move no seu interior (pode ser carregada por mola). Os fios para o sinal do gerador e o FME dos enrolamentos secundários são ligados ao exterior. O objecto a ser controlado pode ser mecanicamente ligado ao caule. Também pode ser feito de material dieléctrico - apenas a posição da haste é relevante para a medição.
Apesar de certas desvantagens inerentes, o sensor indutivo fecha muitas áreas relacionadas com a detecção sem contacto de objectos no espaço. Apesar do constante desenvolvimento da tecnologia, este tipo de dispositivo não abandonará o mercado de dispositivos de medição num futuro previsível, porque a sua acção se baseia nas leis fundamentais da física.
Artigos relacionados: