મોડ્યુલેશન એ બિન-રેખીય વિદ્યુત પ્રક્રિયા છે જેમાં એક સિગ્નલ (વાહક) ના પરિમાણો બીજા સિગ્નલ (મોડ્યુલેટિંગ, માહિતી) દ્વારા બદલાય છે. સંચાર ઇજનેરીમાં આવર્તન, કંપનવિસ્તાર અને તબક્કા મોડ્યુલેશનનો વ્યાપકપણે ઉપયોગ થાય છે. પાવર ઇલેક્ટ્રોનિક્સ અને માઇક્રોપ્રોસેસર તકનીકમાં પલ્સ-પહોળાઈ મોડ્યુલેશન વ્યાપક છે.
સામગ્રી
PWM શું છે (પલ્સ-પહોળાઈ મોડ્યુલેશન)
પલ્સ-પહોળાઈના મોડ્યુલેશનમાં મૂળ સિગ્નલનું કંપનવિસ્તાર, આવર્તન અને તબક્કો યથાવત રહે છે. માહિતી સિગ્નલના પ્રભાવ હેઠળ લંબચોરસ પલ્સની અવધિ (પહોળાઈ) બદલવાને પાત્ર છે. અંગ્રેજી તકનીકી સાહિત્યમાં તેને સંક્ષેપ PWM - પલ્સ-પહોળાઈ મોડ્યુલેશન દ્વારા સૂચવવામાં આવે છે.
PWM ના કાર્યકારી સિદ્ધાંત
પલ્સ-પહોળાઈ-મોડ્યુલેટેડ સિગ્નલ બે રીતે રચાય છે:
- એનાલોગ
- ડિજિટલ
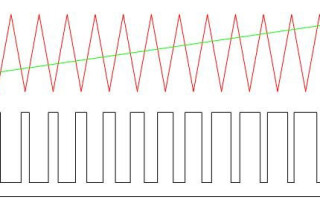
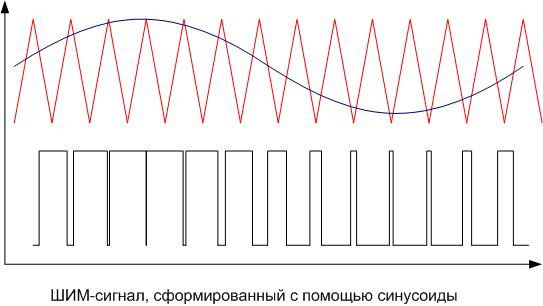
એનાલોગ પીડબલ્યુએમ સિગ્નલ જનરેશન મેથડ ઇનવર્ટિંગ વખતે કરવત અથવા ત્રિકોણાકાર વાહક સિગ્નલનો ઉપયોગ કરે છે. તુલનાકારનું ઇનપુટઅને માહિતી સિગ્નલ તુલનાકારના નોન-ઇનવર્ટિંગ ઇનપુટ પર મોકલવામાં આવે છે. જો વાહકનું ત્વરિત સ્તર મોડ્યુલેટીંગ સિગ્નલ કરતા વધારે હોય, તો તુલનાત્મક આઉટપુટ શૂન્ય છે, જો નીચું - એક.આઉટપુટ એ વાહક ત્રિકોણ અથવા સૉટૂથની આવર્તનને અનુરૂપ આવર્તન સાથેનો એક અલગ સિગ્નલ છે અને મોડ્યુલેટીંગ વોલ્ટેજ સ્તરના પ્રમાણમાં પલ્સ લંબાઈ છે.
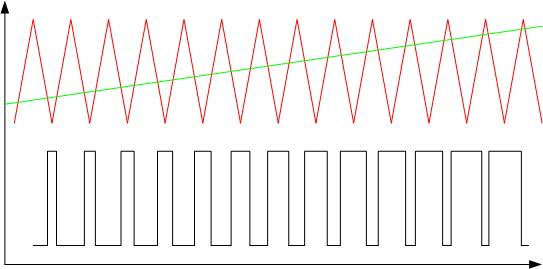
ઉદાહરણ તરીકે, રેખીય-વધતા સિગ્નલ દ્વારા ત્રિકોણાકાર સિગ્નલનું પલ્સ પહોળાઈ મોડ્યુલેશન બતાવવામાં આવ્યું છે. આઉટપુટ કઠોળની અવધિ આઉટપુટ સિગ્નલના સ્તરના પ્રમાણસર છે.
એનાલોગ PWM નિયંત્રકો ઑફ-ધ-શેલ્ફ ઇન્ટિગ્રેટેડ સર્કિટ તરીકે પણ ઉપલબ્ધ છે જેમાં તુલનાત્મક અને વાહક જનરેશન સર્કિટરી હોય છે. બાહ્ય આવર્તન એન્કોડર તત્વોને કનેક્ટ કરવા અને માહિતી સિગ્નલ પૂરા પાડવા માટે ઇનપુટ્સ છે. આઉટપુટમાંથી, એક સિગ્નલ લેવામાં આવે છે જે શક્તિશાળી બાહ્ય સ્વીચોને નિયંત્રિત કરે છે. પ્રતિસાદ માટે ઇનપુટ્સ પણ છે - તે સેટ નિયમન પરિમાણોને જાળવવા માટે જરૂરી છે. આ, ઉદાહરણ તરીકે, TL494 ચિપ છે. એવા કિસ્સાઓ માટે કે જ્યાં ગ્રાહક શક્તિ પ્રમાણમાં ઓછી હોય, બિલ્ટ-ઇન કી સાથે PWM નિયંત્રકો ઉપલબ્ધ છે. 3 amps સુધીના પ્રવાહો માટે LM2596 ચિપની આંતરિક સ્વીચ ડિઝાઇન કરવામાં આવી છે.
ડિજિટલ પદ્ધતિ વિશિષ્ટ ચિપ્સ અથવા માઇક્રોપ્રોસેસરનો ઉપયોગ કરીને કરવામાં આવે છે. પલ્સ લંબાઈ આંતરિક પ્રોગ્રામ દ્વારા નિયંત્રિત થાય છે. લોકપ્રિય PIC અને AVR સહિત ઘણા માઇક્રોકન્ટ્રોલર્સમાં હાર્ડવેર PWM અમલીકરણ માટે ઓનબોર્ડ મોડ્યુલ હોય છે. PWM સિગ્નલ મેળવવા માટે મોડ્યુલને સક્રિય કરવું અને તેના ઓપરેટિંગ પરિમાણોને સેટ કરવું જરૂરી છે. જો આવું કોઈ મોડ્યુલ ન હોય, તો તમે PWM ને સંપૂર્ણ સોફ્ટવેર પદ્ધતિ દ્વારા ગોઠવી શકો છો, તે મુશ્કેલ નથી. આ પદ્ધતિ વધુ શક્યતાઓ આપે છે અને આઉટપુટના લવચીક ઉપયોગને કારણે વધુ સ્વતંત્રતા આપે છે, પરંતુ તેમાં નિયંત્રકના વધુ સંસાધનો સામેલ છે.
PWM સિગ્નલ લાક્ષણિકતાઓ
PWM સિગ્નલની મહત્વની લાક્ષણિકતાઓ છે:
- કંપનવિસ્તાર (યુ);
- આવર્તન (f);
- ડ્યુટી સાયકલ (S) અથવા ફિલ ફેક્ટર D.
લોડના આધારે વોલ્ટમાં કંપનવિસ્તાર સેટ કરવામાં આવે છે. તે ગ્રાહકના નજીવા પુરવઠા વોલ્ટેજ પ્રદાન કરે છે.
પલ્સ-પહોળાઈ મોડ્યુલેટેડ સિગ્નલની આવર્તન નીચેના વિચારણાઓમાંથી પસંદ કરવામાં આવે છે:
- આવર્તન જેટલી વધારે છે, નિયમન ચોકસાઈ વધારે છે.
- આવર્તન ઉપકરણના પ્રતિભાવ સમય કરતા ઓછી ન હોવી જોઈએ, જે PWM દ્વારા નિયંત્રિત થાય છે, અન્યથા નિયમન કરેલ પરિમાણના નોંધપાત્ર ધબકારા હશે.
- આવર્તન જેટલી વધારે છે, સ્વિચિંગ નુકસાન વધારે છે. આ એ હકીકતને કારણે છે કે કીનો સ્વિચિંગ સમય મર્યાદિત છે. લૅચ કરેલી સ્થિતિમાં, સમગ્ર સપ્લાય વોલ્ટેજ મુખ્ય તત્વ પર પડે છે, પરંતુ ત્યાં લગભગ કોઈ વર્તમાન નથી. ખુલ્લી સ્થિતિમાં, સંપૂર્ણ લોડ પ્રવાહ કીમાંથી વહે છે, પરંતુ વોલ્ટેજ ડ્રોપ નાનો છે કારણ કે પાસ-થ્રુ પ્રતિકાર થોડા ઓહ્મ છે. બંને કિસ્સાઓમાં, પાવર ડિસીપેશન નજીવું છે. એક રાજ્યમાંથી બીજા રાજ્યમાં સંક્રમણ ઝડપી છે, પરંતુ ત્વરિત નથી. ઓપન-ક્લોઝ પ્રક્રિયા દરમિયાન આંશિક રીતે ખુલ્લા તત્વ પર મોટો વોલ્ટેજ ઘટી જાય છે અને તે જ સમયે તેમાંથી નોંધપાત્ર પ્રવાહ વહે છે. આ સમયે પાવર ડિસીપેશન ઉચ્ચ મૂલ્યો સુધી પહોંચે છે. આ સમયગાળો ટૂંકો છે, કી પાસે નોંધપાત્ર રીતે ગરમ થવાનો સમય નથી. પરંતુ જેમ જેમ આવર્તન વધે છે તેમ, એકમ સમય દીઠ આવા વધુ સમય અંતરાલ હોય છે અને ગરમીનું નુકસાન વધે છે. તેથી, ચાવીઓના નિર્માણ માટે ઝડપી-અભિનય તત્વોનો ઉપયોગ કરવો મહત્વપૂર્ણ છે.
- નિયંત્રણ કરતી વખતે એક મોટરનું આવર્તન માણસ માટે સાંભળી શકાય તેવી શ્રેણીથી આગળની હોવી જોઈએ - 25 kHz અને તેથી વધુ. કારણ કે નીચલા PWM ફ્રીક્વન્સીઝ પર, અપ્રિય વ્હિસલિંગ થાય છે.
આ જરૂરિયાતો ઘણીવાર એકબીજા સાથે સંઘર્ષમાં હોય છે, તેથી કેટલાક કિસ્સાઓમાં આવર્તનની પસંદગી એ સમાધાનની શોધ છે.
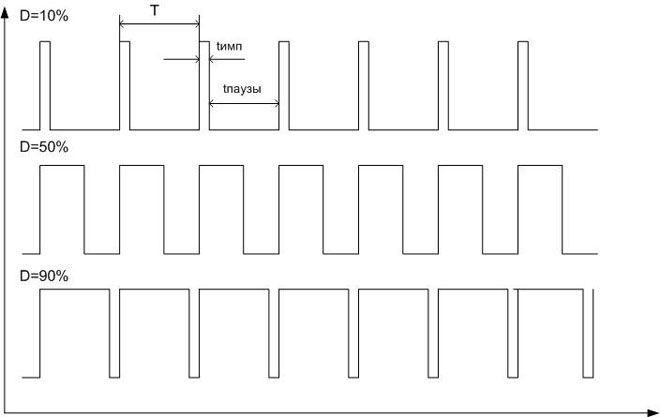
મોડ્યુલેશનની તીવ્રતા ફરજ ચક્ર દ્વારા વર્ગીકૃત થયેલ છે. નાડી પુનરાવર્તિત દર સ્થિર હોવાથી, સમયગાળો પણ સ્થિર છે (T=1/f). સમયગાળામાં પલ્સ અને વિરામનો સમાવેશ થાય છે, જેનો સમયગાળો હોય છે, અનુક્રમે, ટીimp અને ટીવિરામ, જ્યાં ટીimp+tવિરામ=Т. ગુણોત્તર એ પલ્સ અવધિ અને સમયગાળાનો ગુણોત્તર છે - S=timp/ટી.પરંતુ વ્યવહારમાં તે વ્યસ્ત મૂલ્યનો ઉપયોગ કરવા માટે વધુ અનુકૂળ બન્યું - ભરણ પરિબળ: D=1/S=T/timp. ટકાવારી તરીકે ભરણ પરિબળને વ્યક્ત કરવું વધુ અનુકૂળ છે.
PWM અને PWM વચ્ચે શું તફાવત છે
વિદેશી તકનીકી સાહિત્યમાં, પલ્સ-પહોળાઈ મોડ્યુલેશન અને પલ્સ-પહોળાઈ નિયંત્રણ (PWM) વચ્ચે કોઈ ભેદ નથી. રશિયન નિષ્ણાતો આ ખ્યાલો વચ્ચે તફાવત કરવાનો પ્રયાસ કરી રહ્યા છે. હકીકતમાં, PWM એ મોડ્યુલેશનનો એક પ્રકાર છે, એટલે કે, અન્ય, મોડ્યુલેટિંગ સિગ્નલની ક્રિયા હેઠળ કેરિયર સિગ્નલમાં ફેરફાર. વાહક સિગ્નલ માહિતીના વાહક તરીકે કાર્ય કરે છે, અને મોડ્યુલેટીંગ સિગ્નલ આ માહિતીને સેટ કરે છે. અને પલ્સ પહોળાઈ નિયંત્રણ એ PWM દ્વારા લોડ મોડનું નિયમન છે.
PWM માટે કારણો અને અરજીઓ
પલ્સ-પહોળાઈ મોડ્યુલેશનના સિદ્ધાંતનો ઉપયોગ થાય છે શક્તિશાળી ઇન્ડક્શન મોટર્સ માટે સ્પીડ કંટ્રોલર્સ. આ કિસ્સામાં, એડજસ્ટેબલ ફ્રીક્વન્સી (સિંગલ-ફેઝ અથવા થ્રી-ફેઝ)નું મોડ્યુલેટીંગ સિગ્નલ લો-પાવર સાઈન વેવ જનરેટર દ્વારા બનાવવામાં આવે છે અને એનાલોગ રીતે વાહક પર સુપરઇમ્પોઝ કરવામાં આવે છે. આઉટપુટ એ PWM સિગ્નલ છે, જે પાવર ડિમાન્ડ કીને આપવામાં આવે છે. પછી તમે નીચા-પાસ ફિલ્ટર દ્વારા કઠોળના પરિણામી ક્રમને પસાર કરી શકો છો, જેમ કે સરળ RC-ચેન, અને મૂળ સાઇનસૉઇડને અલગ કરી શકો છો. અથવા તમે તેના વિના કરી શકો છો - મોટરની જડતાને કારણે ફિલ્ટરિંગ કુદરતી રીતે થશે. દેખીતી રીતે, વાહકની આવર્તન જેટલી ઊંચી હોય છે, આઉટપુટ સિગ્નલનો આકાર મૂળ સાઇનસૉઇડની નજીક હોય છે.
એક સ્વાભાવિક પ્રશ્ન ઊભો થાય છે - શા માટે તમે એક જ સમયે ઓસિલેટર સિગ્નલને વિસ્તૃત કરી શકતા નથી, ઉદાહરણ તરીકે, ઉચ્ચ પાવર ટ્રાંઝિસ્ટરનો ઉપયોગ કરીને? કારણ કે રેગ્યુલેટીંગ એલિમેન્ટ, રેખીય મોડમાં કાર્ય કરે છે, લોડ અને સ્વીચ વચ્ચે પાવરનું પુનઃવિતરણ કરશે. આનો અર્થ એ છે કે ચાવીરૂપ તત્વ પર ઘણી શક્તિનો વ્યય થાય છે. જો, બીજી બાજુ, એક શક્તિશાળી નિયમનકારી તત્વ કી મોડ (ટ્રિનિસ્ટર, ટ્રાયક્સ, આરજીબીટી ટ્રાન્ઝિસ્ટર) માં કાર્ય કરે છે, તો પાવર સમય જતાં વિતરિત થાય છે.નુકસાન ઘણું ઓછું હશે અને કાર્યક્ષમતા ઘણી વધારે હશે.
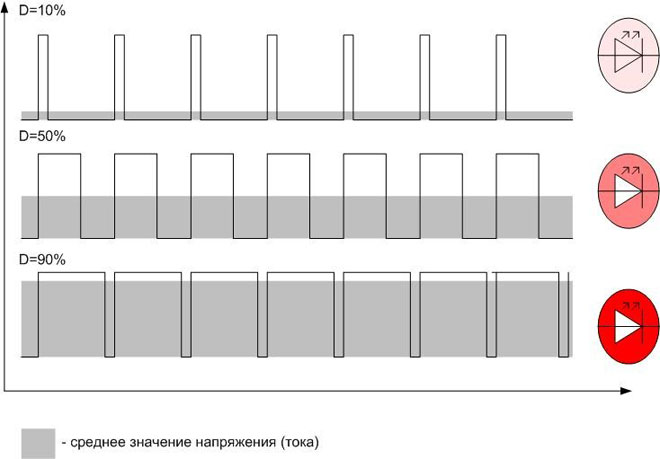
ડિજિટલ ટેક્નોલોજીમાં પલ્સ વિડ્થ કંટ્રોલ માટે કોઈ ખાસ વિકલ્પ નથી. ત્યાં સિગ્નલ કંપનવિસ્તાર સ્થિર છે, અને વોલ્ટેજ અને વર્તમાન બદલવાનો એકમાત્ર રસ્તો એ છે કે પલ્સ પહોળાઈના વાહકને મોડ્યુલેટ કરવું અને પછી તેને સરેરાશ કરવું. તેથી, PWM નો ઉપયોગ તે પદાર્થો પર વોલ્ટેજ અને વર્તમાનને નિયંત્રિત કરવા માટે થાય છે જે પલ્સ સિગ્નલને સરેરાશ કરી શકે છે. સરેરાશ વિવિધ રીતે થાય છે:
- લોડ જડતા દ્વારા. આમ, થર્મોઇલેક્ટ્રિક હીટર અને અગ્નિથી પ્રકાશિત દીવાઓની થર્મલ જડતા કઠોળ વચ્ચેના વિરામમાં નિયંત્રણ વસ્તુઓને નોંધપાત્ર રીતે ઠંડુ થવા દે છે.
- દ્રષ્ટિની જડતાને કારણે. એલઇડી પાસે પલ્સથી પલ્સ સુધી ઝાંખા થવાનો સમય છે, પરંતુ માનવ આંખ આની નોંધ લેતી નથી અને તેને વિવિધ તીવ્રતા સાથે સતત ગ્લો તરીકે સમજે છે. LED મોનિટરનું તેજ નિયંત્રણ આ સિદ્ધાંત પર આધારિત છે. પરંતુ કેટલાક સો હર્ટ્ઝની આવર્તન સાથે અગોચર ઝબકવું હજી પણ હાજર છે અને આંખના થાકનું કારણ બને છે.
- યાંત્રિક જડતાને કારણે. આ ગુણધર્મનો ઉપયોગ ડીસી કલેક્ટર મોટર્સને નિયંત્રિત કરવા માટે થાય છે. જો કંટ્રોલ ફ્રીક્વન્સી યોગ્ય રીતે પસંદ કરવામાં આવી હોય, તો મોટર પાસે ડેડ ટાઈમ પોઝમાં સ્ટોલ થવાનો સમય નથી.
તેથી, PWM નો ઉપયોગ થાય છે જ્યાં વોલ્ટેજ અથવા વર્તમાનનું સરેરાશ મૂલ્ય નિર્ણાયક ભૂમિકા ભજવે છે. ઉલ્લેખિત સામાન્ય કિસ્સાઓ ઉપરાંત, PWM પદ્ધતિ વેલ્ડીંગ મશીનો અને બેટરી ચાર્જર વગેરેમાં સરેરાશ પ્રવાહને નિયંત્રિત કરે છે.
જો કુદરતી સરેરાશ શક્ય ન હોય, તો ઘણા કિસ્સાઓમાં આ ભૂમિકા પહેલેથી જ ઉલ્લેખિત લો-પાસ ફિલ્ટર દ્વારા ધારણ કરી શકાય છે (એલપીએફ) આરસી-ચેઇનના સ્વરૂપમાં. વ્યવહારુ હેતુઓ માટે આ પૂરતું છે, પરંતુ તે સમજવું જોઈએ કે વિકૃતિ વિના એલપીએફ સાથે પીડબ્લ્યુએમમાંથી મૂળ સિગ્નલને અલગ કરવું અશક્ય છે. છેવટે, પીડબ્લ્યુએમ સ્પેક્ટ્રમમાં અનંત મોટી સંખ્યામાં હાર્મોનિક્સ છે, જે અનિવાર્યપણે ફિલ્ટર બેન્ડવિડ્થમાં પ્રવેશ કરશે.તેથી, પુનઃસ્થાપિત સાઇનસૉઇડના આકાર વિશે કોઈ ભ્રમ ન રાખો.
RGB LED નું PWM નિયંત્રણ ખૂબ જ અસરકારક અને કાર્યક્ષમ છે. આ ઉપકરણમાં ત્રણ p-n જંકશન છે - લાલ, વાદળી, લીલો. દરેક ચેનલની બ્રાઇટનેસ અલગથી બદલીને, તમે LED ગ્લોનો લગભગ કોઈપણ રંગ મેળવી શકો છો (શુદ્ધ સફેદ સિવાય). PWM સાથે પ્રકાશ અસરો બનાવવાની શક્યતાઓ અનંત છે.
ડિજિટલ પલ્સ પહોળાઈ મોડ્યુલેટેડ સિગ્નલનો સૌથી સામાન્ય ઉપયોગ એ લોડમાંથી વહેતા સરેરાશ વર્તમાન અથવા વોલ્ટેજને નિયંત્રિત કરવાનો છે. પરંતુ આ પ્રકારના મોડ્યુલેશનનો બિન-માનક ઉપયોગ પણ શક્ય છે. તે બધા ડિઝાઇનરની કલ્પના પર આધાર રાખે છે.
સંબંધિત લેખો: