La modulation est un processus électrique non linéaire dans lequel les paramètres d'un signal (porteur) sont modifiés par un autre signal (modulant, information). Dans le domaine des communications, la modulation de fréquence, d'amplitude et de phase est largement utilisée. Dans l'électronique de puissance et la technologie des microprocesseurs, la modulation de largeur d'impulsion est de plus en plus courante.
Contenu
Qu'est-ce que le PWM (Pulse Width Modulation) ?
Dans la modulation de largeur d'impulsion, l'amplitude, la fréquence et la phase du signal original restent inchangées. La durée (largeur) de l'impulsion carrée est affectée par le signal d'information. Dans la littérature technique anglaise, elle est désignée par l'abréviation PWM - pulse-width modulation.
Principe de fonctionnement du PWM
Le signal modulé en largeur d'impulsion est formé de deux façons :
- analogique ;
- numérique.
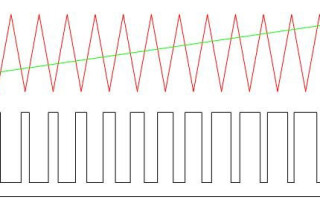
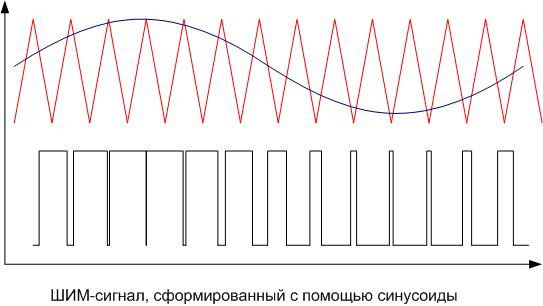
Dans la méthode de génération de PWM analogique, un signal porteur sous la forme d'une forme d'onde en dents de scie ou triangulaire est alimenté à l'inverseur de l'amplificateur. entrée du comparateuret le signal d'information est appliqué à l'entrée non inverseuse du comparateur. Si le niveau instantané de la porteuse est supérieur au signal de modulation, la sortie du comparateur est égale à zéro, si elle est inférieure, elle est égale à un. La sortie est un signal discret dont la fréquence correspond à la fréquence de la porteuse triangulaire ou en dents de scie, et dont la longueur d'impulsion est proportionnelle au niveau de la tension de modulation.
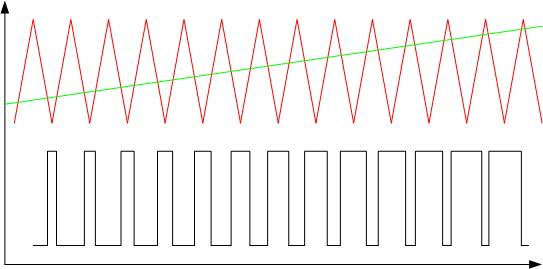
A titre d'exemple, la modulation de la largeur d'impulsion d'un signal triangulaire par une impulsion linéaire croissante est illustrée. La durée des impulsions de sortie est proportionnelle au niveau du signal de sortie.
Les contrôleurs PWM analogiques sont également disponibles sous forme de circuits intégrés prêts à l'emploi qui contiennent un comparateur et un circuit de génération de porteuse. Des entrées sont prévues pour le raccordement d'éléments externes de codage de la fréquence et du signal d'information. La sortie est utilisée pour piloter de puissants commutateurs externes. Il existe également des entrées de rétroaction pour maintenir les paramètres de contrôle définis. C'est le cas, par exemple, de la puce TL494. Les contrôleurs PWM avec commutateurs internes sont disponibles pour les applications avec une puissance consommée relativement faible. Le commutateur interne du LM2596 est conçu pour des courants allant jusqu'à 3 ampères.
La méthode numérique est réalisée à l'aide de puces spécialisées ou de microprocesseurs. La longueur de l'impulsion est contrôlée par un programme interne. De nombreux microcontrôleurs, y compris les populaires PIC et AVR, ont un module intégré pour l'implémentation matérielle du PWM. Pour obtenir un signal PWM, il est nécessaire d'activer le module et de régler ses paramètres de fonctionnement. S'il n'y a pas de module de ce type, le PWM peut être organisé uniquement par une méthode logicielle, ce n'est pas difficile. Cette méthode donne plus de possibilités et offre plus de liberté grâce à l'utilisation flexible des sorties, mais implique plus de ressources du contrôleur.
Caractéristiques du signal PWM
Les caractéristiques importantes du signal PWM sont :
- l'amplitude (U) ;
- fréquence (f) ;
- Facteur de service (S) ou facteur de remplissage D.
L'amplitude en volts est réglée en fonction de la charge. Il doit assurer la tension nominale d'alimentation du consommateur.
La fréquence du signal modulé en largeur d'impulsion est choisie en fonction des considérations suivantes :
- Plus la fréquence est élevée, plus la précision de la régulation est grande.
- La fréquence ne doit pas être inférieure au temps de réponse du dispositif contrôlé par PWM, sinon il y aura une ondulation notable du paramètre contrôlé.
- Plus la fréquence est élevée, plus les pertes de commutation sont importantes. Cela est dû au fait que le temps de commutation de la clé est fini. Dans l'état verrouillé, la totalité de la tension d'alimentation tombe sur l'élément clé, mais il n'y a presque pas de courant. À l'état ouvert, le courant de pleine charge circule dans la clé, mais la chute de tension est faible, car la résistance de passage est de quelques ohms. Dans les deux cas, la dissipation de puissance est négligeable. Le passage d'un état à l'autre est rapide, mais pas instantané. Au cours du processus d'ouverture et de fermeture, une tension élevée chute sur l'élément partiellement ouvert et, en même temps, un courant considérable traverse l'élément. Pendant ce temps, la dissipation de puissance atteint des valeurs élevées. Cette période est courte et la clé n'a pas le temps de chauffer considérablement. Mais lorsque la fréquence augmente, ces intervalles de temps par unité de temps sont plus nombreux et la perte de chaleur augmente. Il est donc important d'utiliser des éléments à action rapide dans la construction des clés.
- Lors du contrôle d'un moteurs la fréquence doit se situer hors de la gamme des fréquences lisibles par l'homme - 25 kHz et plus. En effet, les fréquences de commutation inférieures provoquent des sifflements gênants.
Ces exigences étant souvent contradictoires, le choix de la fréquence est dans certains cas un compromis.
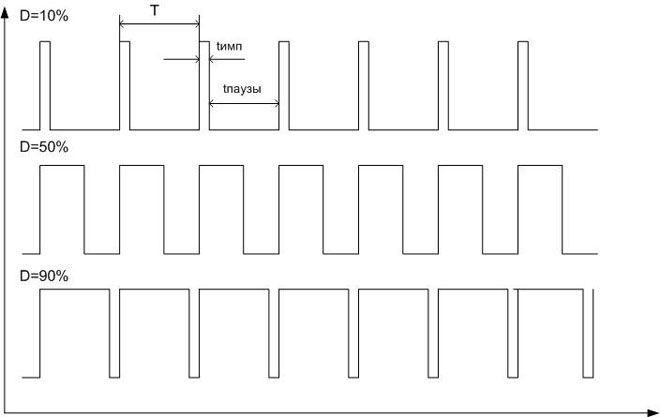
La valeur de modulation est caractérisée par le rapport cyclique. Comme la fréquence de répétition des impulsions est constante, la durée de la période est également constante (T=1/f). Une période se compose d'une impulsion et d'une pause, qui ont une durée de timp et tpauseoù timp+tpause=Т. Le ratio est le rapport entre la durée de l'impulsion et la période - S=timp/T. Mais dans la pratique, il s'est avéré plus pratique d'utiliser la valeur inverse - facteur de remplissage : D=1/S=T/tdiablotin.. Il est encore plus pratique d'exprimer le facteur de remplissage en pourcentage.
Quelle est la différence entre le PWM et le MLI ?
La littérature technique étrangère ne fait pas de distinction entre la modulation de largeur d'impulsion et la commande de largeur d'impulsion (PWM). Les experts russes tentent de distinguer ces concepts. En fait, le PWM est un type de modulation, c'est-à-dire qu'il modifie le signal porteur sous l'influence d'un autre signal, modulant. Le signal porteur agit comme une porteuse et le signal modulant fixe l'information. Et le contrôle de la largeur d'impulsion est la régulation du mode de charge au moyen d'un PWM.
Raisons et applications du PWM
Le principe de la modulation de largeur d'impulsion est utilisé pour Contrôle de la vitesse des moteurs à induction de forte puissance. Dans ce cas, un signal modulant à fréquence variable (monophasé ou triphasé) est généré à l'aide d'un générateur d'ondes sinusoïdales de faible puissance et superposé à la porteuse de manière analogique. La sortie est un signal PWM qui est envoyé aux touches de demande de puissance. La séquence d'impulsions résultante peut ensuite être passée à travers un filtre passe-bas, par exemple une simple chaîne RC, et l'onde sinusoïdale originale peut être isolée. Ou vous pouvez vous en passer - le filtrage se fera naturellement en raison de l'inertie du moteur. Évidemment, plus la fréquence porteuse est élevée, plus la forme d'onde de sortie est proche de la sinusoïde d'origine.
Une question naturelle se pose : pourquoi le signal de l'oscillateur ne peut-il pas être amplifié en une seule fois, par exemple, en utilisant des transistors de haute puissance? Car l'élément régulateur, fonctionnant en mode linéaire, redistribuera la puissance entre la charge et le commutateur. Ainsi, une grande partie de la puissance sera gaspillée sur l'élément clé. En revanche, si un élément régulateur de forte puissance fonctionne en mode clé (trinistor, triac, transistor RGBT), la puissance est répartie dans le temps. Les pertes seront beaucoup plus faibles et le rendement sera beaucoup plus élevé.
En technologie numérique, il n'y a pas d'alternative particulière à la commande par largeur d'impulsion. L'amplitude du signal y est constante, la tension et le courant ne peuvent être modifiés qu'en modulant la largeur d'impulsion de la porteuse et en en faisant ensuite la moyenne. Par conséquent, le PWM est utilisé pour le contrôle de la tension et du courant dans les applications qui peuvent calculer la moyenne du signal d'impulsion. Le calcul de la moyenne est réalisé de différentes manières :
- Par l'inertie de la charge. Par exemple, l'inertie thermique des chauffages thermoélectriques et des lampes à incandescence signifie que les objets de contrôle ne refroidissent pas sensiblement entre les impulsions.
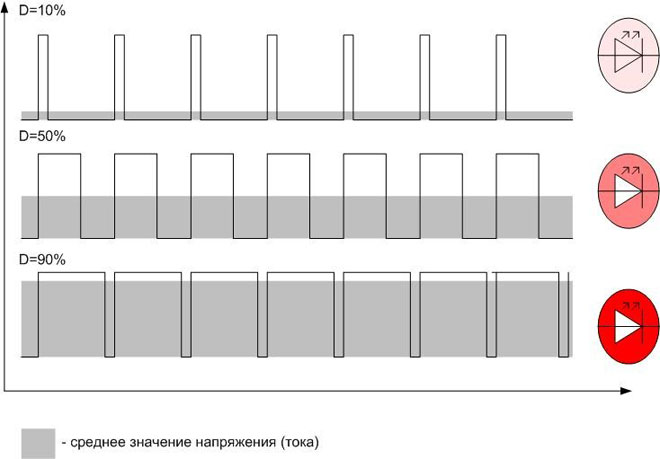
- En raison de l'inertie de la perception. Une LED s'allume d'impulsion en impulsion, mais l'œil humain ne le remarque pas et la perçoit comme une lueur constante d'intensité variable. Ce principe est utilisé pour contrôler la luminosité des points LED. Mais quelques centaines de hertz de clignotements imperceptibles sont toujours présents et provoquent une fatigue oculaire.
- En raison de l'inertie mécanique. Cette propriété est utilisée dans le contrôle des moteurs à collecteur DC. Avec la bonne fréquence de commande, le moteur n'a pas le temps de caler dans les pauses de temps mort.
Par conséquent, le PWM est utilisé lorsque la valeur moyenne de la tension ou du courant joue un rôle décisif. Outre les cas courants mentionnés ci-dessus, la méthode PWM permet de réguler le courant moyen dans les postes à souder, les chargeurs de batterie, etc.
Si le calcul naturel de la moyenne n'est pas possible, dans de nombreux cas, ce rôle peut être assumé par le filtre passe-bas déjà mentionné (LPF) sous la forme d'une chaîne RC. Pour des raisons pratiques, cela suffit, mais il faut comprendre qu'il est impossible de séparer le signal original du PWM avec un LPF sans distorsion. Après tout, le spectre PWM contient un nombre infiniment grand d'harmoniques, qui tomberont inévitablement dans la bande passante du filtre. Ne vous faites donc pas d'illusions sur la forme de l'onde sinusoïdale reconstruite.
Le contrôle PWM d'une LED RGB est très efficace et efficient. Ce dispositif comporte trois jonctions p-n - rouge, bleu et vert. En faisant varier la luminosité de chaque canal séparément, il est possible d'obtenir presque toutes les couleurs de LED (sauf le blanc pur). Les possibilités de créer des effets lumineux avec le PWM sont infinies.
L'application la plus courante d'un signal numérique modulé en largeur d'impulsion est le contrôle du courant ou de la tension moyenne traversant une charge. Mais il est également possible d'utiliser ce type de modulation de manière non conventionnelle. Tout dépend de l'imagination du concepteur.
Articles connexes :