Modulaatio on epälineaarinen sähköinen prosessi, jossa yhden signaalin (kantoaallon) parametreja muutetaan toisella signaalilla (moduloiva informaatio). Viestintätekniikassa käytetään laajalti taajuus-, amplitudi- ja vaihemodulaatiota. Tehoelektroniikassa ja mikroprosessoritekniikassa pulssinleveysmodulaatio on yleistymässä.
Sisältö
Mikä on PWM (pulssinleveysmodulaatio)?
Pulssinleveysmodulaatiossa alkuperäisen signaalin amplitudi, taajuus ja vaihe pysyvät muuttumattomina. Neliöpulssin kestoon (leveyteen) vaikuttaa informaatiosignaali. Englanninkielisessä teknisessä kirjallisuudessa se merkitään lyhenteellä PWM - pulssinleveysmodulaatio.
PWM:n toimintaperiaate
Pulssinleveysmoduloitu signaali muodostetaan kahdella tavalla:
- analoginen;
- digitaalinen.
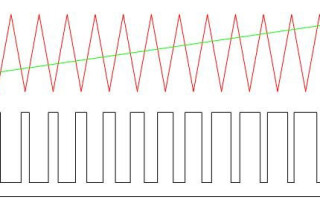
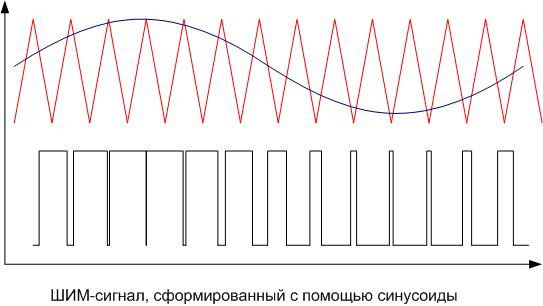
Analogisessa PWM-generaatiomenetelmässä saha- tai kolmioaaltomuotoinen kantoaaltosignaali syötetään invertoivaan taajuusmuuttajaan. komparaattorin tuloja informaatiosignaali syötetään komparaattorin ei-invertoivaan tuloon. Jos hetkellinen kantoaaltotaso on korkeampi kuin modulointisignaali, komparaattorin lähtö on nolla, jos se on matalampi, se on yksi. Lähtö on diskreetti signaali, jonka taajuus vastaa kantokolmion tai sahahampaan taajuutta ja jonka pulssin pituus on verrannollinen modulointijännitteen tasoon.
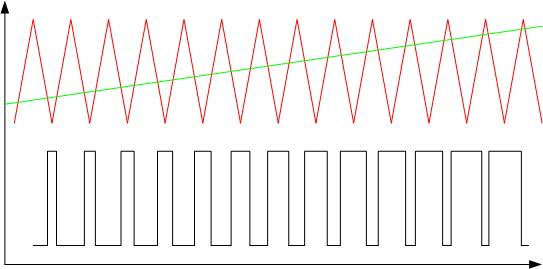
Esimerkkinä on esitetty kolmionmuotoisen signaalin pulssinleveysmodulaatio lineaarisella nousevalla pulssilla. Lähtöpulssien kesto on verrannollinen lähtösignaalin tasoon.
Analogisia PWM-säätimiä on saatavana myös valmiiksi integroituina piireinä, jotka sisältävät komparaattorin ja kantoaallonmuodostuksen. Ulkoisten taajuuskooderielementtien ja informaatiosignaalin kytkemistä varten on omat tulonsa. Lähtöä käytetään tehokkaiden ulkoisten kytkimien ohjaamiseen. Lisäksi on takaisinkytkentätuloja asetettujen säätöparametrien ylläpitämiseksi. Näin on esimerkiksi TL494-sirun kohdalla. Sisäisillä kytkimillä varustettuja PWM-säätimiä on saatavana sovelluksiin, joissa on suhteellisen pieni kulutusteho. LM2596:n sisäinen kytkin on suunniteltu jopa 3 ampeerin virroille.
Digitaalisessa menetelmässä käytetään erikoissiruja tai mikroprosessoreita. Pulssin pituutta ohjataan sisäisellä ohjelmalla. Monissa mikrokontrollereissa, kuten suosituissa PIC- ja AVR-ohjaimissa, on laitteistoon asennettu moduuli PWM:n laitteistototeutusta varten. PWM-signaalin saamiseksi moduuli on aktivoitava ja sen toimintaparametrit asetettava. Jos tällaista moduulia ei ole, PWM voidaan järjestää puhtaasti ohjelmistomenetelmällä, se ei ole vaikeaa. Tämä menetelmä tarjoaa enemmän mahdollisuuksia ja enemmän vapautta, koska ulostuloja voidaan käyttää joustavasti, mutta se vaatii enemmän ohjaimen resursseja.
PWM-signaalin ominaisuudet
PWM-signaalin tärkeät ominaisuudet ovat:
- amplitudi (U);
- taajuus (f);
- Käyttökerroin (S) tai täyttökerroin D.
Amplitudi voltteina asetetaan kuorman mukaan. Sen on varmistettava nimellinen syöttöjännite kuluttajalle.
Pulssinleveysmoduloidun signaalin taajuus valitaan seuraavien seikkojen perusteella:
- Mitä korkeampi taajuus, sitä korkeampi säätötarkkuus.
- Taajuus ei saa olla pienempi kuin PWM:llä ohjattavan laitteen vasteaika, muutoin ohjattavassa parametrissa on huomattavaa aaltoilua.
- Mitä korkeampi taajuus, sitä suuremmat kytkentähäviöt. Tämä johtuu siitä, että avaimen kytkentäaika on rajallinen. Salvatussa tilassa koko syöttöjännite laskee avainelementin yli, mutta virtaa ei kulje juuri lainkaan. Avoimessa tilassa täysi kuormitusvirta kulkee näppäimen läpi, mutta jännitehäviö on pieni, koska läpivirtausvastus on muutama ohmi. Molemmissa tapauksissa häviöteho on häviävän pieni. Siirtyminen tilasta toiseen on nopeaa, mutta ei välitöntä. Avautumis- ja sulkeutumisprosessin aikana osittain avoinna olevaan elementtiin kohdistuu korkea jännite, ja samalla elementin läpi kulkee huomattava virta. Tänä aikana tehohäviö nousee suuriin arvoihin. Tämä aika on lyhyt, eikä avain ehdi lämmetä merkittävästi. Mutta taajuuden kasvaessa tällaisia aikavälejä on enemmän aikayksikköä kohti ja lämpöhäviö kasvaa. Siksi on tärkeää käyttää avainten rakentamisessa nopeasti vaikuttavia elementtejä.
- Kun ohjataan moottorit taajuuden on oltava ihmiselle luettavissa olevien taajuuksien - 25 kHz ja sitä korkeammat taajuudet - ulottumattomissa. Tämä johtuu siitä, että alhaisempi kytkentätaajuus aiheuttaa epämiellyttävää viheltävää ääntä.
Nämä vaatimukset ovat usein ristiriidassa keskenään, joten taajuuden valinta on joissakin tapauksissa kompromissi.
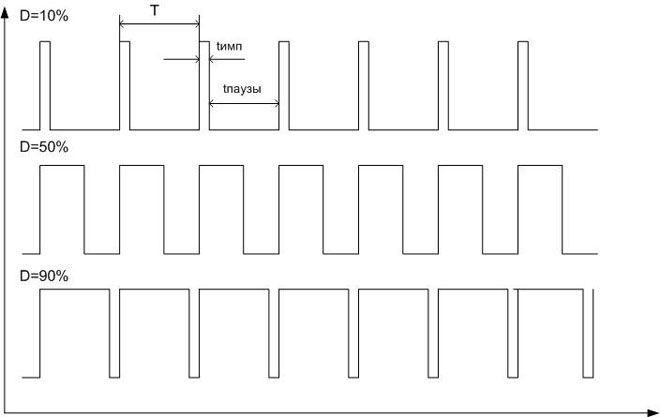
Modulaatioarvoa kuvaa työjakso. Koska pulssin toistotaajuus on vakio, myös jakson kesto on vakio (T=1/f). Jakso koostuu pulssista ja tauosta, joiden kesto on timp ja ttauko, jossa timp+ttauko=Т. Suhde on pulssin keston ja jakson suhde - S=timp/T. Käytännössä osoittautui kuitenkin kätevämmäksi käyttää käänteisarvoa - täyttökerrointa: D=1/S=T/t.imp.. Vielä kätevämpää on ilmaista täyttökerroin prosentteina.
Mitä eroa on PWM:n ja PWM:n välillä?
Ulkomaisessa teknisessä kirjallisuudessa ei tehdä eroa pulssinleveysmodulaation ja pulssinleveysohjauksen (PWM) välillä. Venäläiset asiantuntijat yrittävät erottaa nämä käsitteet toisistaan. Itse asiassa PWM on eräänlainen modulaatio eli kantoaaltosignaalin muuttaminen toisen, moduloivan signaalin vaikutuksesta. Kantoaaltosignaali toimii kantoaaltosignaalina ja moduloiva signaali asettaa tiedon. Ja pulssinleveysohjaus on kuormitustilan säätö PWM:n avulla.
PWM:n syyt ja sovellukset
Pulssinleveysmodulaation periaatetta käytetään seuraavissa tapauksissa Suuritehoisten induktiomoottoreiden nopeuden säätö. Tässä tapauksessa moduloiva ohjattu taajuussignaali (yksi- tai kolmivaiheinen) tuotetaan pienitehoisella siniaaltogeneraattorilla ja asetetaan kantoaallon päälle analogisesti. Lähtö on PWM-signaali, joka syötetään tehontarpeen näppäimiin. Tuloksena saatu pulssisarja voidaan sitten johtaa alipäästösuodattimen, esim. yksinkertaisen RC-ketjun, läpi, ja alkuperäinen siniaalto voidaan poimia. Tai voit tehdä sen ilman sitä - suodatus tapahtuu luonnollisesti moottorin hitausvoiman ansiosta. Mitä korkeampi kantoaaltotaajuus on, sitä enemmän lähtöaaltomuoto on lähellä alkuperäistä sinimuotoista aaltoa.
Herää luonnollinen kysymys - miksi esimerkiksi oskillaattorisignaalia ei voida vahvistaa kerralla, suuritehoisten transistorien käyttö? Koska lineaarisessa tilassa toimiva säätöelementti jakaa tehon uudelleen kuorman ja kytkimen välillä. Tämä aiheuttaa sen, että avainelementtiin tuhlataan paljon virtaa. Jos taas tehokas säätöelementti toimii avaintilassa (trinistori, triakki, RGBT-transistori), teho jakautuu ajallisesti. Häviöt ovat paljon pienemmät ja hyötysuhde on paljon korkeampi.
Digitaalisessa tekniikassa ei ole erityistä vaihtoehtoa pulssinleveysohjaukselle. Signaalin amplitudi on siellä vakio, jännitettä ja virtaa voidaan muuttaa vain moduloimalla kantoaallon pulssin leveyttä ja laskemalla siitä keskiarvo. Siksi PWM:ää käytetään jännitteen ja virran ohjaukseen sovelluksissa, joissa pulssisignaali voidaan keskiarvoistaa. Keskiarvoistaminen tapahtuu eri tavoin:
- Kuorman inertia. Esimerkiksi lämpösähköisten lämmittimien ja hehkulamppujen lämpöinertian ansiosta ohjauskohteet eivät jäähtyisi merkittävästi pulssien välisillä tauoilla.
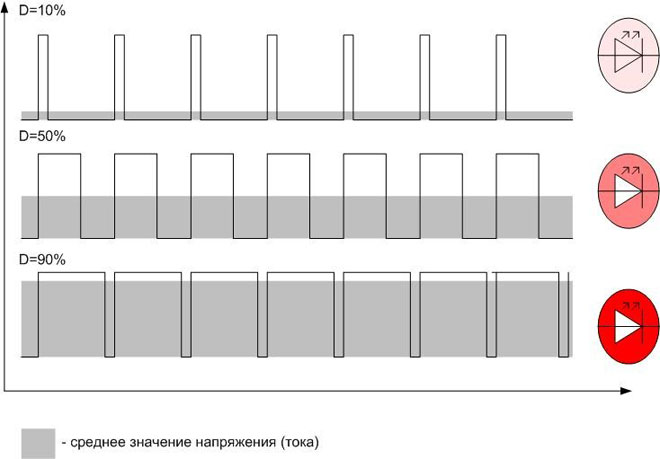
- Käsityksen inertiaalisuuden vuoksi. LED syttyy pulssista toiseen, mutta ihmissilmä ei huomaa tätä, vaan havaitsee sen jatkuvana hehkuna, jonka voimakkuus vaihtelee. Tätä periaatetta käytetään LED-pisteiden kirkkauden säätämiseen. Muutaman sadan hertsin huomaamaton vilkkuminen on kuitenkin edelleen läsnä ja aiheuttaa silmien väsymistä.
- Mekaanisen hitausvoiman vuoksi. Tätä ominaisuutta käytetään DC-keräinmoottorin ohjauksessa. Kun ohjaustaajuus on oikea, moottori ei ehdi pysähtyä kuolleen ajan taukojen aikana.
Siksi PWM:ää käytetään, kun keskimääräinen jännite- tai virta-arvo on ratkaisevassa asemassa. Edellä mainittujen yleisten tapausten lisäksi PWM-menetelmällä säädetään keskimääräistä virtaa esimerkiksi hitsauskoneissa ja akkulatureissa.
Jos luonnollinen keskiarvoistaminen ei ole mahdollista, monissa tapauksissa tämän tehtävän voi ottaa jo mainittu alipäästösuodatin (LPF) RC-ketjun muodossa. Käytännössä tämä riittää, mutta on ymmärrettävä, että alkuperäistä signaalia on mahdotonta erottaa PWM:stä LPF:llä ilman vääristymiä. Loppujen lopuksi PWM-spektri sisältää äärettömän suuren määrän harmonisia yliaaltoja, jotka väistämättä osuvat suodattimen kaistanleveyteen. Älä siis anna itsellesi harhakuvitelmia rekonstruoidun siniaallon muodosta.
RGB-LEDin PWM-ohjaus on erittäin tehokas ja toimiva. Tässä laitteessa on kolme p-n-liitosta - punainen, sininen ja vihreä. Vaihtelemalla kunkin kanavan kirkkautta erikseen voidaan saavuttaa lähes mikä tahansa LED-väri (paitsi puhdas valkoinen). Mahdollisuudet luoda valaistustehosteita PWM:n avulla ovat rajattomat.
PWM-moduloidun digitaalisen signaalin yleisin sovellus on kuorman läpi kulkevan keskivirran tai -jännitteen säätö. Tällaista modulaatiota on kuitenkin mahdollista käyttää myös epätavallisilla tavoilla. Kaikki riippuu suunnittelijan mielikuvituksesta.
Aiheeseen liittyvät artikkelit: