Sähköntutkimus kehittyi nopeasti XIX ja XX vuosisadoilla, mikä johti sähköisten asynkronimoottoreiden luomiseen. Näiden laitteiden ansiosta teollisuuden kehitys on ottanut valtavan harppauksen eteenpäin, ja nyt on mahdotonta kuvitella tehtaita ja laitoksia ilman asynkronikoneiden apua.
Sisältö
Historia
Asynkronimoottorin historia juontaa juurensa vuoteen 1888, jolloin Nikola Tesla patentoi sähkömoottoripiirin, samana vuonna toinen sähkötieteilijä, Gallileo Ferrari, patentoi sähkömoottoripiirin. Gallileo Ferraris julkaisi artikkelin asynkronisen koneen teoreettisista näkökohdista.
Vuonna 1889 venäläinen fyysikko Mihail Osipovitš Dolivo-Dobrovolski sai Saksassa patentin asynkronisesta kolmivaiheisesta sähkömoottorista.

Kaikki nämä keksinnöt ovat mahdollistaneet sähkökoneiden parantamisen ja johtaneet sähkökoneiden laajamittaiseen käyttöön teollisuudessa, mikä on nopeuttanut huomattavasti kaikkia valmistusprosesseja, parantanut tehokkuutta ja vähentänyt työintensiteettiä.
Tällä hetkellä yleisin teollisuudessa käytetty sähkömoottori on Dolivo-Dobrovolskyn luoma sähkökoneen prototyyppi.
Asynkronimoottorin rakenne ja toimintaperiaate
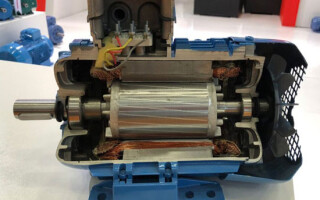
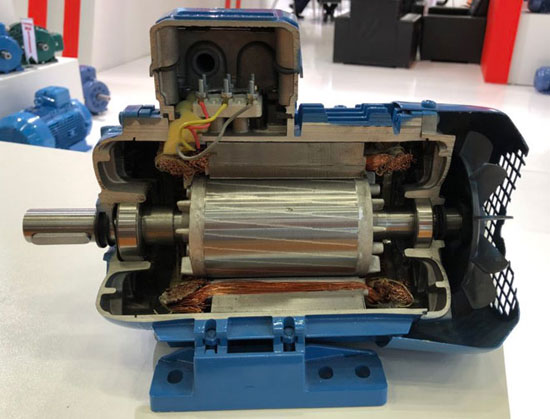
Asynkronisen sähkömoottorin pääkomponentit ovat staattori ja roottori, jotka on erotettu toisistaan ilmavälillä. Moottorin aktiivisen työn tekevät käämit ja roottorin ydin.
Moottorin epäsynkronisuus määritellään roottorin nopeuden ja sähkömagneettisen kentän nopeuden väliseksi eroksi.
Staattori - on moottorin kiinteä osa, jonka ydin on valmistettu sähköteräksestä ja joka on asennettu perusrunkoon. Runko valetaan materiaalista, joka ei ole magnetoitunut (esim.valurauta, alumiini). Staattorikäämitykset ovat kolmivaiheinen järjestelmä, jossa johdot on sijoitettu uriin, joiden taivutuskulma on 120 astetta. Käämit kytketään verkkoon vakiona tähti- tai kolmiopiirinä.

Roottori - on moottorin liikkuva osa. Asynkronimoottoreissa on kahdenlaisia roottoreita: oikosulkuhäkki- ja vaiheroottoreita. Nämä tyypit eroavat toisistaan roottorikäämityksen rakenteen osalta.
Induktiomoottori, jossa on oikosulkuhäkkiroottori
Tämän tyyppisen sähkökoneen patentoi ensimmäisenä M.O. Dolivo-Dobrovolsky ja sitä kutsutaan kansanomaisesti nimellä "oravanpyörä" sen ulkonäön vuoksi. Oikosuljettu roottorikäämitys koostuu oikosuljetuista kuparitangoista (alumiini, messinki) ja ne asetetaan roottorin ytimen käämitysrakoihin. Tämäntyyppisessä roottorissa ei ole liikkuvia koskettimia, joten nämä moottorit ovat erittäin luotettavia ja pitkäikäisiä.
Asynkronimoottori, jossa on vaihe-roottori
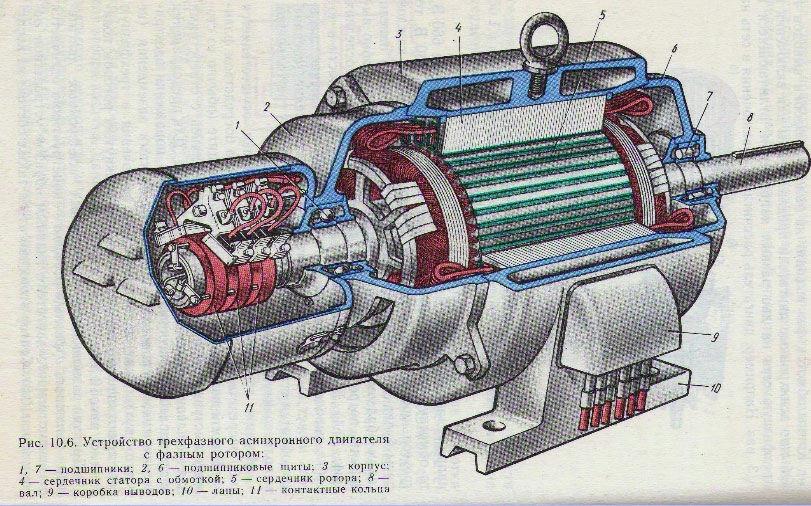
Tämän laitteen avulla nopeutta voidaan säätää laajalla alueella. Vaiheroottori on kolmivaiheinen käämi, joka on kytketty tähti- tai kolmiokäämitykseen. Näissä moottoreissa on erikoisharjat, joilla voidaan säätää roottorin nopeutta. Jos tällaisen moottorin mekanismiin lisätään erityinen reostaatti, moottorin käynnistysvastus pienenee ja sähköverkkoon ja itse laitteeseen haitallisesti vaikuttavat syöksyvirrat vähenevät.
Toimintaperiaate
Kun staattorikäämiin syötetään sähkövirtaa, syntyy magneettivuo. Koska vaiheet ovat 120 astetta toisiinsa nähden siirtyneet, tämä aiheuttaa käämien vuon pyörimisen. Jos roottori on oikosulussa, tämä pyöriminen synnyttää roottorissa virran, joka luo sähkömagneettisen kentän. Roottorin ja staattorin magneettikentät saavat sähkömoottorin roottorin pyörimään vuorovaikutuksessa toistensa kanssa. Jos roottori on vaiheistettu, staattoriin ja roottoriin syötetään jännite samanaikaisesti, kumpaankin mekanismiin syntyy magneettikenttä, ne ovat vuorovaikutuksessa keskenään ja pyörittävät roottoria.
Asynkronimoottoreiden edut
| Oikosulku-roottorilla | Vaiheittain kierretyllä roottorilla |
|---|---|
| 1. Yksinkertainen käynnistyslaite ja -piiri | 1. Alhainen käynnistysvirta |
| 2. Alhainen valmistushinta | 2. Muuttuva nopeus. |
| 3. Akselin nopeus ei muutu kuormituksen kasvaessa. | 3. Toiminta pienillä ylikuormituksilla ilman nopeuden vaihtelua. |
| 4. Kestää lyhytaikaisia ylikuormituksia. | 4. Voi käyttää automaattista uudelleenkäynnistystä |
| 5. Luotettava ja kestävä käytössä | 5. Suuri vääntömomentti |
| 6. Soveltuu kaikkiin työolosuhteisiin | |
| 7. korkea hyötysuhde |
Asynkronimoottoreiden haitat
| Oikosulku-roottorilla | Vaiheittain kierretyllä roottorilla |
|---|---|
| 1. Roottorin nopeutta ei voida säätää | 1. ylisuuri |
| 2. Alhainen käynnistysmomentti | 2. Alhaisempi hyötysuhde |
| 3. Korkea käynnistysvirta | 3. Usein toistuva huolto kuluneiden harjojen vuoksi. |
| 4. Suunnittelun ja liikkuvien koskettimien monimutkaisuus |
Asynkronimoottorit ovat erittäin tehokkaita laitteita, joilla on hyvät mekaaniset ominaisuudet, ja siksi ne ovat yleisimmin käytetty moottorityyppi.
Toimintatavat

Asynkroninen sähkömoottori on monipuolinen mekanismi, ja sillä on useita toimintatiloja keston suhteen:
- Jatkuva;
- Lyhytaikainen;
- Ajoittainen; jaksottainen;
- Ajoittainen;
- Erityistä.
Jatkuva toiminta - Asynkronisten laitteiden perustoimintatapa, jolle on ominaista sähkömoottorin jatkuva toiminta ilman pysäytyksiä vakiokuormalla. Tämä toimintatapa on yleisin, ja sitä käytetään teollisuuslaitoksissa kaikkialla maailmassa.
Lyhytaikainen toiminta - Suoritetaan, kunnes tasainen kuormitus on saavutettu tietyn ajan (10-90 minuuttia) ilman, että sillä on tarpeeksi aikaa lämmetä. Tämän jälkeen se kytkeytyy pois päältä. Tätä tilaa käytetään nesteiden (vesi, öljy, kaasu jne.) kuljettamiseen.vesi, öljy, kaasu) ja muissa tilanteissa.
Ajoittainen toiminta - Toiminnan kesto on kiinteä, ja kun työjakso on päättynyt, se kytkeytyy pois päältä. Käynnistä-toimi-pysäytä-toimintatila. Se voidaan kytkeä pois päältä joksikin aikaa, ennen kuin se ehtii jäähtyä ulkolämpötilaan, ja kytkeä sitten uudelleen päälle.
Ajoittainen toiminta - Moottori ei kuumene maksimilämpötilaan, mutta ei myöskään jäähdy ympäristön lämpötilaan. Sitä käytetään hisseissä, liukuportaissa jne.
Erikoistila - Aktivoinnin kesto ja ajanjakso on mielivaltainen.
Sähkötekniikassa on käytössä sähkökoneiden palautuvuusperiaate, joka tarkoittaa, että laite voi sekä muuntaa sähköenergiaa mekaaniseksi energiaksi että suorittaa päinvastaisen toiminnon.
Myös asynkronimoottorit noudattavat tätä periaatetta, ja niissä on moottori- ja generaattoritila.
Moottorin toiminta - on asynkronisen sähkömoottorin perustoimintatapa. Kun käämeihin kytketään jännite, syntyy sähkömagneettinen vääntömomentti, joka kiinnittää roottorin akseliin, jolloin akseli alkaa pyöriä, moottori saavuttaa vakionopeuden ja tekee hyödyllistä työtä.
Generaattoritila - perustuu periaatteeseen, jonka mukaan sähkövirta moottorin käämityksissä syntyy roottorin pyörimisestä. Jos moottorin roottoria pyöritetään mekaanisesti, staattorin käämityksiin syntyy sähkömotorinen voima ja kondensaattorin ollessa käämityksissä syntyy kapasitiivinen virta. Jos kondensaattorin kapasiteetti on tietty arvo moottorin ominaisuuksista riippuen, generaattori herättää itsensä ja syntyy kolmivaiheinen jännitejärjestelmä. Oikosulkumoottori toimii siis kuin generaattori.
Asynkronimoottoreiden nopeuden säätö
Asynkronisten sähkömoottoreiden nopeuden säätöön ja niiden toimintatilojen hallintaan on olemassa seuraavat menetelmät:
- Taajuus - sähköverkon virran taajuutta muuttamalla sähkömoottorin nopeutta muutetaan. Tässä menetelmässä käytetään taajuusmuuttajaksi kutsuttua laitetta;
- Reostaatti - roottorissa olevan reostaatin vastusta muuttamalla pyörimisnopeus muuttuu. Tämä menetelmä lisää käynnistysmomenttia ja kriittistä luistoa;
- Pulssi - ohjausmenetelmä, jossa moottoriin syötetään erityyppinen jännite.
- Käämitykset vaihdetaan tähdestä kolmiokierteeseen sähkömoottorin käydessä, mikä vähentää käynnistysvirtaa;
- Ohjaus napaparien vaihdon avulla oikosulkuhäkkiroottoreita varten;
- Induktiivisen vastuksen kytkentä vaihe-roottorimoottoreita varten.
Elektronisten järjestelmien kehittymisen myötä erilaisten asynkronimoottoreiden ohjauksesta on tulossa yhä tehokkaampaa ja tarkempaa. Tällaisia moottoreita käytetään kaikkialla maailmassa, ja niiden suorittamien tehtävien kirjo kasvaa päivä päivältä, eikä niiden tarve vähene.
Aiheeseen liittyvät artikkelit: