Yleisesti ottaen anturi on laite, joka muuntaa yhden fyysisen suureen toiseksi suureeksi, jota voidaan käsitellä, siirtää tai muuntaa. Ensimmäinen on yleensä fysikaalinen suure, jota ei voida suoraan mitata (lämpötila, nopeus, siirtymä jne.), kun taas toinen on sähköinen tai optinen signaali. Anturit, joiden peruselementti on induktanssikela, ovat oma lukunsa mittauslaitteiden alalla.
Tietoja
Miten induktiiviset anturit on suunniteltu ja miten ne toimivat?
Induktiiviset anturit ovat toimintaperiaatteeltaan aktiivisia, eli ne tarvitsevat ulkoisen oskillaattorin. Tämä synnyttää induktorikäämiin signaalin, jolla on määritelty taajuus ja amplitudi.
Kelojen läpi kulkeva virta luo magneettikentän. Jos magneettikenttään tulee johtava esine, kelan parametrit muuttuvat. Nyt on vain havaittava tämä muutos.
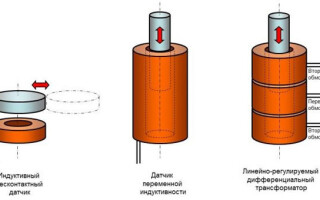
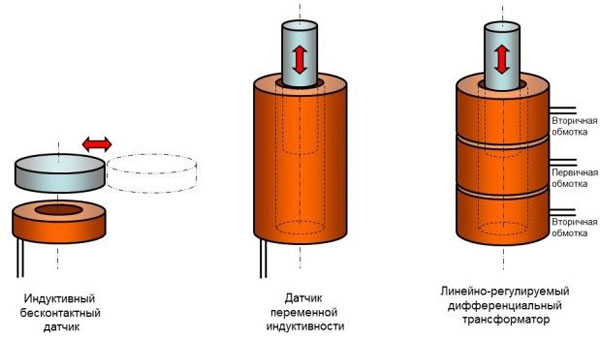
Yksinkertaiset kosketuksettomat anturit reagoivat metalliesineiden läsnäoloon kelan lähikentässä. Tämä muuttaa kelan impedanssia, ja tämä muutos on muunnettava sähköiseksi signaaliksi, joka on vahvistettava ja/tai havaittava vertailupiirillä.
Toisenlainen anturi reagoi kelan ytimenä toimivan kappaleen pituussuuntaisen asennon muutokseen. Kun esineen sijainti muuttuu, se liukuu kelan sisään tai ulos, jolloin sen induktanssi muuttuu. Tämä muutos voidaan muuntaa sähköiseksi signaaliksi ja mitata. Toinen versio tästä anturista on sellainen, jossa esine työnnetään kelan päälle ulkopuolelta. Tämä aiheuttaa induktanssin pienenemisen suojausvaikutuksen vuoksi.
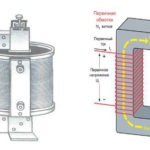
Toinen versio induktiivisesta siirtymäanturista on lineaarinen muuttuva differentiaalimuuntaja (LVDT). Se on yhdistelmäkela, joka on valmistettu seuraavassa järjestyksessä:
- Toisiokäämi 1;
- ensiökäämi;
- toisiokäämi 2.
Generaattorista tuleva signaali syötetään ensiökäämitykseen. Keskimmäisen kelan luoma magneettikenttä indusoi sähkömagneettisen kentän kumpaankin toisiokäämiin (muuntajan periaate).muuntajan periaate). Kun ydin liikkuu, se muuttaa käämien keskinäistä kytkentää, mikä muuttaa sähkömotorista voimaa kussakin käämissä. Mittauspiiri voi havaita tämän muutoksen. Koska ytimen pituus on pienempi kuin yhdistelmäkelan kokonaispituus, kohteen sijainti voidaan määrittää yksiselitteisesti toissijaisten käämien sähkömagneettisen kentän suhteen perusteella.
Pyörivä kooderi perustuu samaan periaatteeseen, joka perustuu käämien välisen induktiivisen kytkennän muuttamiseen. Se koostuu kahdesta koaksiaalisesta kelasta. Signaali syötetään yhteen käämiin, ja toisen käämin sähkömagneettinen kenttä riippuu keskinäisestä kiertokulmasta.
Toimintaperiaatteen perusteella on selvää, että induktiiviset anturit ovat rakenteestaan riippumatta kosketuksettomia antureita. Ne toimivat etäältä eivätkä vaadi suoraa kosketusta valvottavaan kohteeseen.
Induktiivisten antureiden edut ja haitat
Induktiivisten antureiden edut ovat pääasiassa seuraavat
- Vankka rakenne;
- ei kosketusyhteyksiä;
- suuri lähtöteho, mikä vähentää kohinan vaikutusta ja yksinkertaistaa ohjauspiiriä;
- korkea herkkyys;
- Mahdollisuus toimia teollisuuden taajuusalueella toimivalla vaihtovirtalähteellä.
Induktiivisten antureiden suurimmat haitat ovat niiden koko, paino ja monimutkaisuus. Käämien käämitys vaadittujen parametrien mukaisesti edellyttää erikoislaitteita. Toinen haittapuoli on se, että pääoskillaattorista tulevan signaalin amplitudi on säilytettävä tarkasti. Herkkyysalue muuttuu myös signaalin amplitudin muuttuessa. Koska anturit toimivat vain vaihtovirralla, amplitudin säilyttämisestä tulee selvä tekninen ongelma. Anturia ei ole mahdollista kytkeä suoraan (tai tasomuuntajan kautta) kotitalous- tai teollisuusverkkoon, jossa jännitteen amplitudi- tai taajuusvaihtelut voivat olla jopa 10 % jopa normaalissa käytössä, jolloin mittaustarkkuutta ei voida hyväksyä.
Mittaustarkkuuteen voivat vaikuttaa myös:
- Ulkoiset magneettikentät (anturin suojaaminen ei ole mahdollista sen toimintaperiaatteen vuoksi);
- syöttö- ja mittauskaapeleiden sähkömagneettisten kenttien induktiot.
- valmistuksen epätarkkuudet;
- Virheet anturin ominaisuuksissa;
- Takaiskut tai muodonmuutokset anturin kiinnityskohdassa, jotka eivät vaikuta yleiseen suorituskykyyn;
- Tarkkuuden riippuvuus lämpötilasta (käämityslangan parametrit, mukaan lukien sen resistanssi, muuttuvat).
Induktanssiantureiden kyvyttömyyttä reagoida dielektristen kohteiden läsnäoloon niiden magneettikentässä voidaan pitää sekä etuna että haittana. Toisaalta tämä rajoittaa soveltamisalaa. Toisaalta se tekee niistä epäherkkiä lialle, rasvalle, hiekalle jne. valvottavissa kohteissa.
Kun induktiivisten antureiden rajoitukset ja mahdolliset rajoitukset ymmärretään, induktiivisten antureiden etuja voidaan hyödyntää järkevästi.
Induktiivisten antureiden käyttöalueet
Induktiivisia lähestymiskytkimiä käytetään usein rajakytkiminä. Näitä laitteita käytetään monenlaisissa sovelluksissa:
- turvajärjestelmissä ikkunoiden ja ovien luvattoman avaamisen tunnistimina;
- kauko-ohjausjärjestelmissä kokoonpanojen ja mekanismien ääriasentoantureina;
- jokapäiväisessä elämässä ovien ja ikkunaluukkujen suljetun asennon merkkipiireissä;
- esineiden laskemiseen (esim. liukuhihnalla liikkuvat);
- vaihteiden pyörimisnopeuden määrittämiseen (jokainen anturin ohi kulkeva hammas tuottaa pulssin);
- Muissa tilanteissa.

Kulma-antureita voidaan käyttää akselien, hammaspyörien ja muiden pyörivien yksiköiden pyörimiskulmien määrittämiseen sekä absoluuttisina antureina. Niitä voidaan käyttää myös työstökoneissa ja robotiikkasovelluksissa lineaarikoodereiden rinnalla. Aina kun on tarpeen tietää koneen osien tarkka sijainti.
Induktiivisten antureiden käytännön sovellukset
Käytännössä induktiiviset anturit voidaan toteuttaa monin eri tavoin. Yksinkertaisin toteutus ja integrointi on kaksijohtiminen yksittäinen anturi, joka valvoo metalliesineiden läsnäoloa anturialueellaan. Nämä laitteet valmistetaan usein W-muotoisen ytimen pohjalta, mutta tämä ei ole ratkaiseva seikka. Tämä malli on helpompi valmistaa.
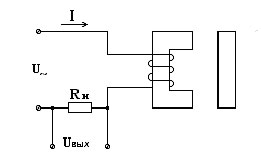
Kun kelan resistanssi muuttuu, virtapiirin virta ja kuorman jännitehäviö muuttuvat. Nämä muutokset voidaan havaita. Ongelmana on, että kuormitusvastuksesta tulee kriittinen. Jos se on liian suuri, virran muutos metallikappaleen ilmestyessä on suhteellisen pieni. Tämä vähentää järjestelmän herkkyyttä ja häiriönsietokykyä. Jos se on pieni, virtapiirin virta on suuri ja tarvitaan kestävämpi anturi.
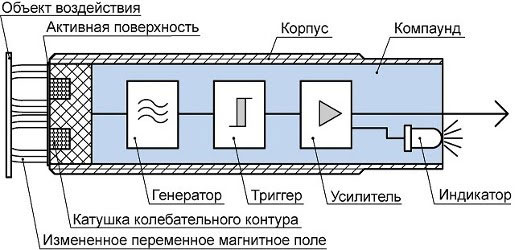
Tästä syystä on olemassa malleja, joissa anturipiiri on rakennettu anturikoteloon. Generaattori tuottaa pulsseja, jotka syöttävät induktorikäämiä. Kun tietty taso saavutetaan, laukaisija aktivoituu, jolloin tilasta 0 siirrytään tilaan 1 tai päinvastoin. Puskurivahvistin tehostaa signaalia tehon ja/tai jännitteen osalta, sytyttää (sammuttaa) LEDin ja antaa erillisen signaalin ulkoista piiriä varten.
Lähtösignaali voidaan tuottaa:
- sähkömagneettisen tai puolijohderele - nolla- tai ykkösjännitetaso;
- "kuivakosketus" sähkömagneettinen rele;
- avoin kollektori transistori (n-p-n- tai p-n-p-rakenteet).
Tässä tapauksessa anturin kytkemiseen tarvitaan kolme johdinta:
- virtalähde;
- yhteinen johto (0 voltti);
- signaalijohto.
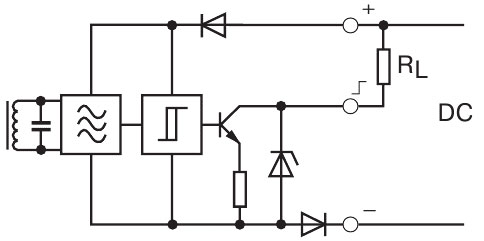
Tällaiset anturit voivat saada virtansa myös tasajännitteestä. Niiden induktanssipulssit tuotetaan sisäisellä oskillaattorilla.
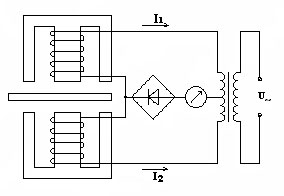
Differentiaaliantureita käytetään asennonvalvontaan. Jos tarkkailtava kohde on symmetrisesti molempiin keloihin nähden, molempien kelojen läpi kulkeva virta on sama. Jos jompikumpi kela on kallistettu kenttää kohti, syntyy epätasapaino, jolloin kokonaisvirta ei ole enää nolla, mikä voidaan havaita mittarilla, jossa on nuoli asteikon keskellä. Indikaattorin avulla voidaan määrittää sekä offsetin suuruus että sen suunta. Mittakellon sijasta voidaan käyttää ohjauspiiriä, joka antaa signaalin, kun saadaan tietoa asennon muutoksesta, ryhtyy toimenpiteisiin kohteen kohdistamiseksi, tekee prosessikorjauksia jne.

Lineaarisesti säädettyjen differentiaalimuuntajien periaatteeseen perustuvat anturit valmistetaan kokonaisina yksikköinä, jotka koostuvat runkorakenteesta, jossa on ensiö- ja toisiokäämitykset ja sen sisällä liikkuva tanko (se voi olla jousikuormitettu). Generaattorisignaalin ja toisiokäämien EMF:n johdot on kytketty ulkopuolelle. Ohjattava kohde voidaan liittää mekaanisesti varteen. Se voidaan valmistaa myös dielektrisestä materiaalista - ainoastaan varren asennolla on merkitystä mittauksen kannalta.
Tietyistä luontaisista haitoista huolimatta induktiivinen anturi sulkee monia alueita, jotka liittyvät kosketuksettomaan kohteiden havaitsemiseen avaruudessa. Teknologian jatkuvasta kehityksestä huolimatta tämäntyyppiset laitteet eivät lähitulevaisuudessa tule poistumaan mittalaitemarkkinoilta, koska niiden toiminta perustuu fysiikan peruslakeihin.
Aiheeseen liittyvät artikkelit: