Differentiaalinen proportionaali-integraalisäädin on laite, joka asennetaan automatisoituihin järjestelmiin pitämään yllä tiettyä parametria, joka pystyy muuttumaan.
Ensi näkemältä se on hämmentävää, mutta PID-säätö on mahdollista selittää myös tyhmille, esim. ihmiset, jotka eivät ole aivan perehtyneet elektronisiin järjestelmiin ja laitteisiin.
Sisältö
Mikä on PID-säädin?
PID-säädin on ohjauspiiriin integroitu laite, jolla on pakollinen takaisinkytkentä. Se on suunniteltu ylläpitämään asetettuja tasoja, esim. ilman lämpötilaa.
Laite antaa ohjaussignaalin tai lähtösignaalin ohjaimelle antureilta tai lähettimiltä saatujen tietojen perusteella. Säätimillä on korkea siirtymätarkkuus ja suorituskyvyn laatu.
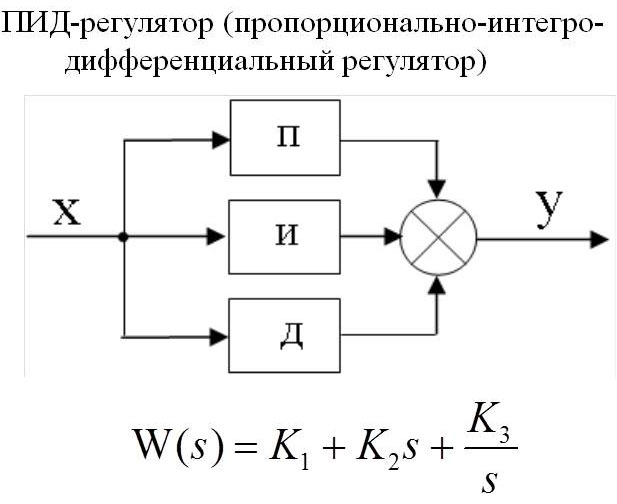
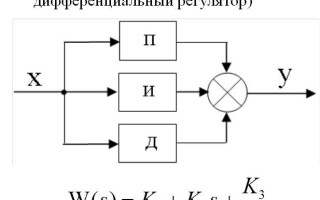
PID-säätimen kolme kerrointa ja toimintaperiaate
PID-säätimen tehtävänä on antaa lähtösignaali tehosta, joka tarvitaan valvottavan parametrin pitämiseksi ennalta määrätyllä tasolla. Arvon laskemiseen käytetään monimutkaista matemaattista kaavaa, joka sisältää 3 kerrointa - suhteellinen, integraali, differentiaali.
Otetaan valvontakohteeksi vesisäiliö, jonka lämpötila on pidettävä tietyllä tasolla säätämällä höyryventtiilin avautumisastetta.
Suhteellinen komponentti ilmestyy, kun se ei vastaa syöttötietoja. Yksinkertaistettuna se kuulostaa seuraavalta: otetaan todellisen lämpötilan ja halutun lämpötilan välinen ero, kerrotaan se säädettävällä kertoimella ja saadaan venttiiliin syötettävä lähtösignaali. Toisin sanoen heti kun lämpötila on laskenut, lämmitysprosessi käynnistyy; heti kun lämpötila on noussut halutun lämpötilan yläpuolelle, se kytketään pois päältä tai jopa jäähdytetään.
Seuraavaksi tulee integraalinen komponentti, joka on suunniteltu kompensoimaan ympäristön tai muiden häiriötekijöiden vaikutuksia lämpötilan pitämiseen asetusarvossa. Koska ohjattaviin laitteisiin vaikuttavat aina lisätekijät, luku muuttuu jo silloin, kun suhteellisen komponentin laskentatiedot saapuvat. Ja mitä suuremmat ulkoiset vaikutukset ovat, sitä suuremmat ovat luvun vaihtelut. Tehonsiirrossa tapahtuu hyppäyksiä.
Integraalikomponentti yrittää palauttaa lämpötila-arvon aiempien arvojen perusteella, jos lämpötila on muuttunut. Prosessi kuvataan tarkemmin alla olevalla videolla.
Tämän jälkeen säätimen lähtösignaali syötetään kertoimen mukaan lämpötilan nostamiseksi tai laskemiseksi. Ajan mittaan valitaan arvo, joka kompensoi ulkoiset tekijät, ja yliaallot häviävät.
Integraalia käytetään virheiden poistamiseen laskemalla staattinen virhe. Tärkeintä tässä prosessissa on valita oikea kerroin, muuten virhe (epäsuhta) vaikuttaa myös integraalikomponenttiin.
Kolmas PID-komponentti on differentiaalikomponentti. Se on suunniteltu kompensoimaan järjestelmään kohdistuvan vaikutuksen ja palautteen välisiä viiveitä. Suhteellinen säädin syöttää virtaa, kunnes lämpötila saavuttaa oikean arvon, mutta laitteelle välitettäessä tietoja esiintyy aina virheitä, erityisesti suurilla arvoilla. Tämä voi johtaa ylikuumenemiseen. Differentiaali ennakoi viiveiden tai ympäristövaikutusten aiheuttamat poikkeamat ja vähentää toimitettua tehoa etukäteen.
PID-säätimen määrittäminen
PID-säädin viritetään kahdella menetelmällä:
- Synteesi käsittää parametrien laskemisen järjestelmämallin perusteella. Tällainen viritys on tarkkaa, mutta se edellyttää perusteellista automaattisen ohjauksen teorian tuntemusta. Sen voivat tehdä vain insinöörit ja tiedemiehet. Koska on tarpeen ottaa virtausominaisuudet ja tehdä paljon laskelmia.
- Manuaalinen menetelmä perustuu kokeiluun ja erehdykseen. Tämä tehdään ottamalla tietoja jo olemassa olevasta järjestelmästä ja tekemällä muutoksia yhteen tai useampaan säätökertoimeen. Kun laite on kytketty päälle ja lopputulosta on tarkkailtu, parametreja muutetaan haluttuun suuntaan. Ja niin edelleen, kunnes haluttu suoritustaso on saavutettu.
Teoreettisia analyysi- ja viritysmenetelmiä käytetään harvoin käytännössä, koska valvontakohteen ominaisuuksia ei tunneta ja koska on olemassa lukuisia mahdollisia häiriövaikutuksia. Järjestelmän havainnointiin perustuvat kokeelliset menetelmät ovat yleisempiä.
Nykyaikaiset automatisoidut prosessit toteutetaan erikoistuneina moduuleina, joita ohjataan ohjelmistolla säätökertoimien säätämiseksi.
PID-säätimen tarkoitus
PID-säädin on suunniteltu pitämään tietty arvo - lämpötila, paine, säiliön taso, virtaus putkistossa, jonkin aineen konsentraatio jne. - vaaditulla tasolla muuttamalla toimilaitteiden, kuten automaattisten säätöventtiilien, ohjaustoimintoa käyttämällä suhteellisia, integroivia ja erottavia arvoja sen asettamiseen.
Sovelluksen tarkoituksena on saada tarkka ohjaussignaali, jolla voidaan ohjata suuria laitoksia ja jopa voimalaitosreaktoreita.
Esimerkki lämpötilan säätöpiiristä
PID-säätimiä käytetään usein lämpötilan säätöön, ja esimerkkinä tästä automaattisesta prosessista on yksinkertainen esimerkki veden lämmittämisestä säiliössä.
Säiliö täytetään nesteellä, joka on lämmitettävä haluttuun lämpötilaan ja pidettävä halutulla tasolla. Säiliön sisällä on lämpötila-anturi - termopari. termopari tai vastuslämpömittari ja se on kytketty suoraan PID-säätimeen.
Toimitamme höyryä nesteen lämmittämiseen, kuten alla olevassa kuvassa on esitetty, automaattisen säätöventtiilin avulla. Itse venttiili vastaanottaa signaalin ohjaimelta. Käyttäjä syöttää PID-säätimeen säiliössä ylläpidettävän lämpötilan asetusarvon.

Jos säätimen kertoimet ovat virheelliset, veden lämpötila hyppää ja venttiili on täysin auki ja täysin kiinni. Tällöin PID-kertoimet on laskettava ja syötettävä uudelleen. Jos se tehdään oikein, järjestelmä tasaantuu lyhyen ajan kuluttua ja säiliön lämpötila pysyy asetetussa lämpötilassa, kun säätöventtiilin avausaste on keskiasennossa.
Aiheeseen liittyvät artikkelit: