Teadus elektrivaldkonnas XIX ja XX sajandil, arenes kiiresti, mis viis elektriliste asünkroonmootorite loomiseni. Selliste seadmete abil on tööstustööstuse areng edasi liikunud ja praegu ei kujuta tehaseid ja tehaseid ilma asünkroonseid elektrimootoreid kasutavate jõumasinateta.
Sisu
Ajalugu
Asünkroonmootorite ajalugu sai alguse 1888. aastal, mil Nikola Tesla patenteeris elektrimootori ahela, samal aastal teine elektriteadlane Gallileo Ferrarid avaldas artikli asünkroonmasina teoreetilistest aspektidest.
1889. aastal vene füüsik Mihhail Osipovitš Dolivo-Dobrovolski sai Saksamaal patendi asünkroonsele kolmefaasilisele elektrimootorile.

Kõik need leiutised võimaldasid täiustada elektrimasinaid ja tõid kaasa elektrimasinate massilise kasutamise tööstuses, mis kiirendas oluliselt kõiki tehnoloogilisi protsesse tootmises, parandas töö efektiivsust ja vähendas selle töömahukust.
Praegu on tööstuses kõige levinum elektrimootor Dolivo-Dobrovolsky loodud elektrimasina prototüüp.
Asünkroonmootori ehitus ja tööpõhimõte
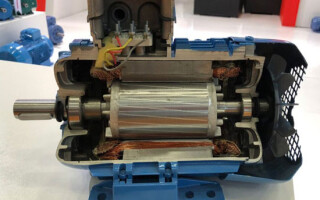
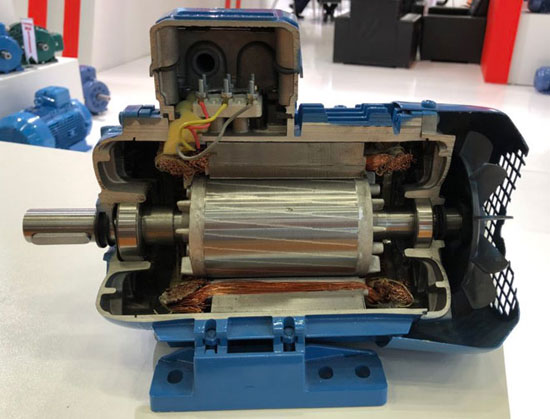
Asünkroonse elektrimootori põhikomponendid on staator ja rootor, mis on üksteisest eraldatud õhuvahega. Mootori aktiivset tööd teostavad mähised ja rootori südamik.
Asünkroonmootor tähendab rootori kiiruse ja elektromagnetvälja kiiruse erinevust.
Staator - on mootori fikseeritud osa, mille südamik on valmistatud elektriterasest ja on paigaldatud voodisse. Raam on valatud materjalist, mis ei ole magnetiline (malm, alumiinium). Staatori mähised on kolmefaasiline süsteem, milles juhtmed asetatakse piludesse, mille läbipaindenurk on 120 kraadi. Mähisfaasid ühendatakse võrku standardina täht- või kolmnurkahelates.

Rootor - on mootori liikuv osa. Asünkroonseid elektrimootori rootoreid on kahte tüüpi: orav- ja faasirootorid. Need tüübid erinevad üksteisest rootori mähise konstruktsiooni poolest.
Asünkroonmootor koos oravapuuri rootoriga
Seda tüüpi elektrimasinaid patenteeris esmakordselt M.O. Dolivo-Dobrovolsky ja seda nimetatakse rahvapäraselt "orava ratas" disaini välimuse tõttu. Lühises rootori mähis koosneb lühistatud vasest varrastest (alumiinium, messing) ja sisestatakse rootori südamiku mähise piludesse. Seda tüüpi rootoril ei ole liikuvaid kontakte, seega on sellised mootorid väga töökindlad ja vastupidavad.
Faasirootoriga asünkroonmootor
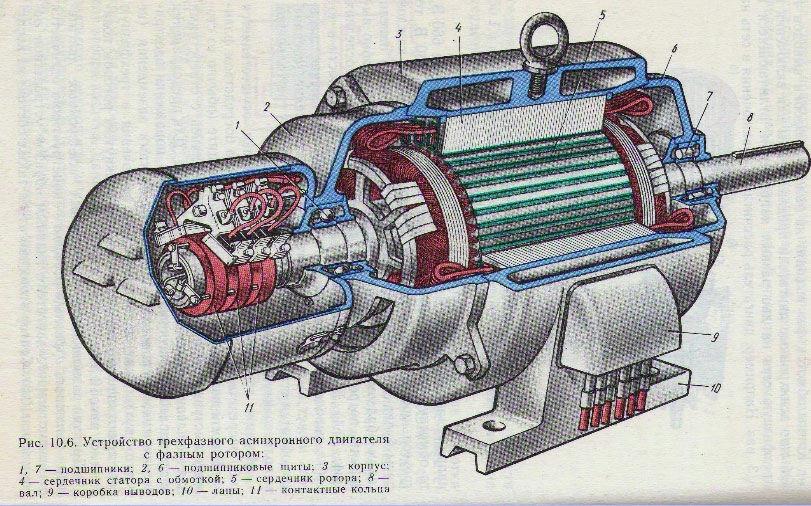
Selline seade võimaldab reguleerida töökiirust laias vahemikus. Faasirootor on kolmefaasiline mähis, mis on ühendatud täht- või kolmnurkahelaga. Sellistel mootoritel on konstruktsioonis spetsiaalsed harjad, mille abil saab reguleerida rootori kiirust. Kui sellise mootori mehhanismile lisada spetsiaalne reostaat, siis mootori käivitamisel väheneb aktiivne takistus ja seega vähenevad käivitusvoolud, millel on kahjulik mõju elektrivõrgule ja seadmele endale.
Toimimispõhimõte
Kui staatori mähistele rakendatakse elektrivoolu, tekib magnetvoog. Kuna faasid on üksteise suhtes 120 kraadi võrra nihutatud, põhjustab see mähistes oleva voo pöörlemise. Kui rootor on lühises, tekitab see pöörlemine rootoris voolu, mis tekitab elektromagnetvälja. Omavahel suheldes põhjustavad rootori ja staatori magnetväljad elektrimootori rootori pöörlemise. Faasifaasilise rootori puhul rakendatakse staatorile ja rootorile samaaegselt pinget, igas mehhanismis tekib magnetväli, need interakteeruvad üksteisega ja pööravad rootorit.
Asünkroonsete mootorite eelised
| Lühisrootor | Osafaasiline rootor |
|---|---|
| 1. Lihtne käivitusseade ja vooluahel | 1. Madal käivitusvool |
| 2. Madal tootmishind | 2. Võimalus reguleerida pöörlemiskiirust |
| 3. Võlli kiirus ei muutu koormuse suurenemisel | 3. Töö väikeste ülekoormustega ilma kiirust muutmata |
| 4. Suudab taluda lühiajalist ülekoormust | 4. Oskab rakendada automaatset käivitust |
| 5. Töökindel ja vastupidav | 5. On suure pöördemomendiga |
| 6. Sobib igasugustesse töötingimustesse | |
| 7. On kõrge efektiivsusega |
Asünkroonsete mootorite puudused
| Oravapuurirootoriga | Faasimähisega rootoriga |
|---|---|
| 1. Rootori kiirust ei saa reguleerida | Suur suurus 1. |
| 2. Madal käivitusmoment 2. | 2. Tõhusus on madalam |
| 3.Kõrge käivitusvool | Sage hooldus harjade kulumise tõttu |
| 4. Teatud disaini keerukus ja liikuvad kontaktid |
Asünkroonmootorid on väga tõhusad seadmed, millel on suurepärased mehaanilised omadused, mis teeb neist kasutussageduse liidrid.
Töörežiimid

Asünkroonset tüüpi elektrimootor on universaalne mehhanism ja sellel on kestuse osas mitu töörežiimi:
- Pidev;
- Lühike aeg;
- Katkendlik; Perioodiline;
- Korduvalt-lühiajaliselt;
- Eriline.
Pidev režiim - on asünkroonsete seadmete peamine töörežiim, mida iseloomustab elektrimootori pidev töötamine ilma pideva koormuseta väljalülitusteta. See töörežiim on kõige levinum, seda kasutatakse tööstusettevõtetes kõikjal.
Lühiajaline töö - töötab kuni püsiva koormuse saavutamiseni kindlaksmääratud aja jooksul (10 kuni 90 minutit), tal pole piisavalt aega soojendamiseks. Pärast seda lülitatakse see välja. Seda režiimi kasutatakse tööainete tarnimisel (vesi, õli, gaas) ja muudes olukordades.
Perioodiline operatsioon - Töö kestus on määratud väärtusega ja pärast töötsükli lõppu lülitatakse see välja. Töörežiim start-operate-stopp. Sel juhul võib see mõneks ajaks välja lülituda, enne kui tal on aega jahtuda välistemperatuurini, ja seejärel uuesti sisse lülituda.
Katkendlik operatsioon - Mootor ei kuumene maksimaalselt, kuid tal pole ka aega jahtuda ümbritseva õhu temperatuurini. Seda kasutatakse liftides, eskalaatorites ja muudes seadmetes.
Erirežiim - Aktiveerimise kestus ja periood on suvalised.
Elektrotehnikas kehtib elektrimasinate pööratavuse põhimõte – see tähendab, et seade suudab nii elektrienergiat mehaaniliseks energiaks muundada kui ka pöördtoimingut sooritada.
Sellele põhimõttele vastavad ka asünkroonsed elektrimootorid ning neil on mootori ja generaatori töörežiim.
Mootori töö - on asünkroonse elektrimootori põhitöörežiim.Kui mähistele rakendatakse pinget, tekib elektromagnetiline pöördemoment, mis haarab rootori koos võlliga ja seega hakkab võll pöörlema, mootor läheb konstantsele kiirusele, tehes kasulikku tööd.
Generaatori režiim - põhineb mootori mähistes elektrivoolu ergastamisel rootori pöörlemisel. Kui mootori rootorit mehaaniliselt pöörata, tekib staatori mähistes elektromotoorjõud, mähistes oleva kondensaatori juuresolekul tekib mahtuvuslik vool. Kui kondensaatori võimsus on teatud väärtus, siis olenevalt mootori omadustest toimub generaatori iseergutus ja tekib kolmefaasiline pingesüsteem. Seetõttu töötab oravapuuri mootor nagu generaator.
Asünkroonsete mootorite kiiruse reguleerimine
Asünkroonsete elektrimootorite pöörlemiskiiruse reguleerimiseks ja nende töörežiimide juhtimiseks on järgmised võimalused:
- Sagedus - muutes voolu sagedust elektrivõrgus, muutub elektrimootori pöörlemissagedus. Selle meetodi jaoks kasutatakse seadet, mida nimetatakse sagedusmuunduriks;
- Reostaat - muutes reostaadi takistust rootoris, muutub pöörlemissagedus. See meetod suurendab käivitusmomenti ja kriitilist libisemist;
- Impulss - juhtimismeetod, mille käigus mootorile rakendatakse spetsiaalset pinget.
- Mähiste ümberlülitamine elektrimootori töö ajal "tähe" ahelast "kolmnurksele" ahelale, mis vähendab käivitusvoolusid;
- Juhtimine pooluste paaride vahetamisega lühises rootorite jaoks;
- Induktiivtakisti ühendamine faasirootormootoritele.
Elektrooniliste süsteemide arenedes muutub erinevate asünkroonsete elektrimootorite juhtimine üha tõhusamaks ja täpsemaks.Selliseid mootoreid kasutatakse kõikjal maailmas, selliste mehhanismidega täidetavate ülesannete mitmekesisus kasvab iga päevaga ja vajadus nende järele ei vähene.
Seotud artiklid: