Diferenciální proporcionálně-integrální regulátor je zařízení, které se instaluje do automatizovaných systémů k udržování daného parametru schopného změny.
Na první pohled je to matoucí, ale je možné vysvětlit PID regulaci i pro hlupáky, tj. lidem, kteří nejsou zcela obeznámeni s elektronickými systémy a spotřebiči.
Obsah
Co je to PID regulátor?
PID regulátor je zařízení začleněné do regulačního obvodu s povinnou zpětnou vazbou. Je určen k udržování nastavených hodnot, např. teploty vzduchu.
Zařízení poskytuje řídicí signál nebo výstupní signál řídicí jednotce na základě údajů přijatých ze senzorů nebo vysílačů. Regulátory mají vysokou přechodovou přesnost a kvalitu výkonu.
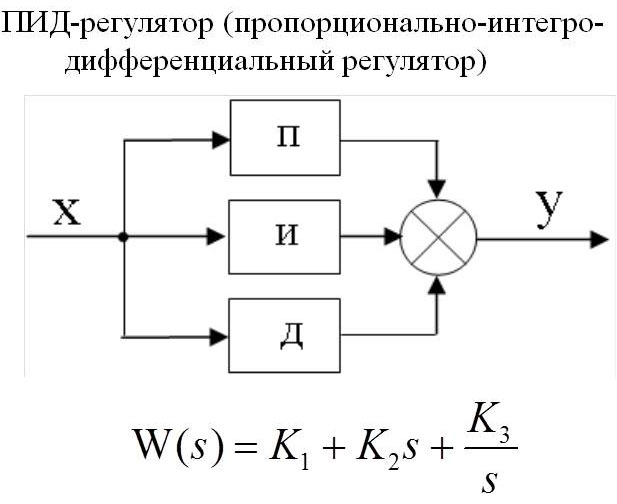
Tři koeficienty PID regulátoru a princip činnosti
Úkolem PID regulátoru je poskytovat výstupní signál výkonu potřebného k udržení řízeného parametru na předem stanovené úrovni. K výpočtu hodnoty se používá složitý matematický vzorec, který obsahuje 3 koeficienty - proporcionální, integrální a diferenciální.
Vezměme si jako regulační objekt nádrž s vodou, ve které je třeba udržovat teplotu na dané úrovni regulací stupně otevření parního ventilu.
Poměrná složka se objeví v okamžiku nesouladu se vstupními daty. Zjednodušeně řečeno to vypadá tak, že se vezme rozdíl mezi skutečnou a požadovanou teplotou, vynásobí se nastavitelným koeficientem a získá se výstupní signál, který se přivede na ventil. Jinými slovy, jakmile teplota klesne, spustí se proces ohřevu; jakmile stoupne nad požadovanou teplotu, vypne se nebo se dokonce ochladí.
Následuje integrální složka, která je určena ke kompenzaci vlivu prostředí nebo jiných rušivých vlivů na udržování nastavené teploty. Protože na řízené spotřebiče vždy působí další faktory, mění se údaj již v okamžiku, kdy přicházejí údaje pro výpočet proporcionální složky. A čím větší jsou vnější vlivy, tím větší jsou výkyvy v čísle. Dochází ke skokům v dodávce výkonu.
Integrální složka se pokouší vrátit hodnotu teploty na základě minulých hodnot, pokud se změnila. Postup je podrobněji popsán ve videu níže.
Poté je výstupní signál regulátoru přiváděn podle koeficientu pro zvýšení nebo snížení teploty. Postupem času se zvolí hodnota, která kompenzuje vnější faktory, a nárazy zmizí.
Integrál se používá k eliminaci chyb výpočtem statické chyby. Při tomto postupu je nejdůležitější zvolit správný koeficient, jinak se chyba (neshoda) projeví i na integrální složce.
Třetí složkou PID je diferenciální složka. Je navržen tak, aby kompenzoval účinky zpoždění, které vzniká mezi dopadem na systém a zpětnou vazbou. Proporcionální regulátor dodává energii, dokud teplota nedosáhne správné hodnoty, ale při předávání informací do zařízení vždy dochází k chybám, zejména u velkých hodnot. To může vést k přehřátí. Diferenciál předvídá odchylky způsobené zpožděním nebo vlivy prostředí a předem snižuje dodávaný výkon.
Nastavení PID regulátoru
PID regulátor se ladí dvěma metodami:
- Syntéza zahrnuje výpočet parametrů na základě modelu systému. Takové ladění je přesné, ale vyžaduje důkladné znalosti teorie automatického řízení. To mohou udělat pouze inženýři a vědci. Protože je nutné vzít průtokové charakteristiky a provést mnoho výpočtů.
- Ruční metoda je založena na metodě pokusů a omylů. To se provádí tak, že se převezmou údaje z již existujícího systému a provedou se určité úpravy jednoho nebo více koeficientů regulátoru. Po zapnutí a pozorování konečného výsledku se parametry změní požadovaným směrem. A tak dále, dokud není dosaženo požadované úrovně výkonu.
Teoretická analýza a metody ladění se v praxi používají jen zřídka, a to z důvodu neznalosti vlastností objektu řízení a řady možných rušivých vlivů. Běžnější jsou experimentální metody založené na pozorování systému.
Moderní automatizované procesy jsou realizovány jako specializované moduly pod kontrolou softwaru, který upravuje koeficienty regulátoru.
Účel PID regulátoru
PID regulátor je určen k udržování určité hodnoty - teploty, tlaku, hladiny v nádrži, průtoku v potrubí, koncentrace něčeho apod. - na požadované úrovni změnou řídicího působení na akční členy, jako jsou automatické regulační ventily, a to pomocí proporcionálních, integračních a diferenčních hodnot pro jeho nastavení.
Účelem aplikace je získat přesný řídicí signál, který je schopen řídit velká zařízení a dokonce i reaktory elektráren.
Příklad obvodu regulace teploty
PID regulátory se často používají při řízení teploty, jako příklad tohoto automatického procesu uveďme jednoduchý příklad ohřevu vody v nádrži.
Nádrž je naplněna kapalinou, kterou je třeba ohřát na požadovanou teplotu a udržovat na požadované úrovni. Uvnitř nádrže je teplotní čidlo - termočlánek. termočlánek nebo odporový teploměr a je přímo připojen k regulátoru PID.
K ohřevu kapaliny budeme dodávat páru, jak je znázorněno na obrázku níže, s automatickým regulačním ventilem. Samotný ventil přijímá signál z řídicí jednotky. Obsluha zadá do PID regulátoru požadovanou hodnotu teploty, která má být v zásobníku udržována.

Pokud jsou koeficienty regulátoru nesprávné, dojde ke skokovému zvýšení teploty vody a k úplnému otevření a uzavření ventilu. V takovém případě je třeba vypočítat a znovu zadat koeficienty PID. Při správném postupu se systém po krátké době vyrovná a teplota v nádrži se udržuje na nastavené teplotě, přičemž stupeň otevření regulačního ventilu je ve střední poloze.
Související články: