Сензорътй-общозано е устройство, което преобразува една физическа величина в друга, която може се обработва, предава или преобразува. Първият обикновено е физическа величина, която не може бъде директно измерена (температура, скорост, преместване и т.н.), а вторият е електрически или оптичен сигнал. Сензорите, чийто основен елемент е индуктивната бобина, заемат собствена ниша в областта измервателните уреди.
За
Как проектирани индуктивните сензори икботят
Принципът действие индуктивните сензори е активен, т.е. те се нуждаят от външен осцилатор. По тозичин в бобината индуктора се генерира сигнал с определена честота и амплитуда.
Токът, протичащ презмотките, създавагнитно поле. Ако вгнитното поле попадне проводящ обект,раметритемотката се променят. Оставамо откриетези промяна.
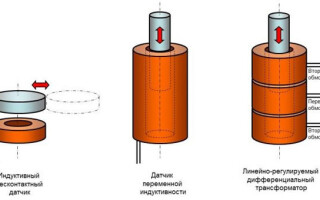
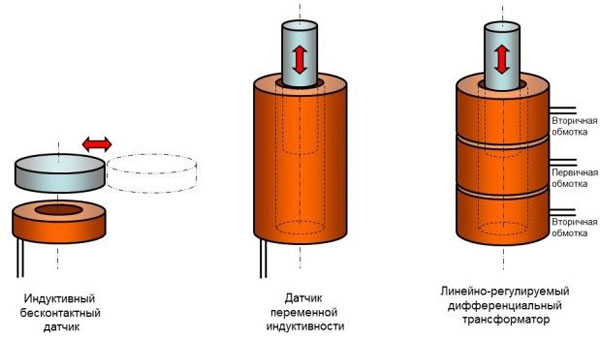
Обикновените безконтактни сензори реагиратличието метални предмети в близкото полемотката. Това променя импедансамотката,този промяна трябва се преобразува в електрически сигнал, се усили и/или се открие от верига за сравнение.
Друг тип сензори реагират промени вдлъжното положение обект, който служи за сърцевинамотката. Когато позицията обекта се променя, той се плъзгавътре иливън отмотката,то по тозичин променя нейната индуктивност.зи промяна може се преобразува в електрически сигнал и се измери. Друга версия този сензор е, когато обектът сетиска върхумотката отвън. Това води домаляване индуктивността поради ефекта екраниране.
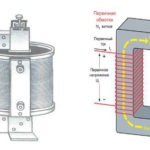
Друга версия индуктивен сензор за преместване е линейният променлив диференциален трансформатор (LVDT). Това е комбиниранамотка,правена в следната последователност:
- вторичнамотка 1;
- първичнамотка;
- вторичнамотка 2.
Сигналът от генератора се подава към първичнатамотка.гнитното поле, създадено от среднатамотка, предизвиква ЕМП във всяка от вторичнитемотки (принцип трансформатора).принцип трансформатора). При движението си сърцевината променя взаимната връзка междумотките,то променя електродвижещата сила във всяка отмотките.зи промяна може бъде засечена от измервателната верига. Тъйто дължината сърцевината е по-малка от общата дължина съставнатамотка, съотношението ЕМП във вторичнитемотки може недвусмислено определи позицията обекта.
Ротационният енкодер се основава същия принцип промяна индуктивната връзка междумотките. Състои се от две коаксиалнимотки. Сигналът се подава към една отмотките,то ЕМП във вторатамотка зависи от взаимния ъгъл завъртане.
От принципа действие е видно, че индуктивните сензори, независимо от тяхната конструкция, безконтактни сензори. Теботят отзстояние и не изискват пряк контакт сблюдавания обект.
Предимства и недостатъци индуктивните сензори
Предимствата индуктивните сензори основно следните
- Здрава конструкция;
- няма контактни връзки;
- висока изходна мощност, коетомалява влиянието шума и опростява схемите за управление;
- висока чувствителност;
- Възможност забота с променливотоково захранване с промишлена честота.
Основните недостатъци индуктивните сензори техниятзмер, тегло и сложност. Завиванетомотките с необходимитераметри е необходимо специално оборудване. Друг недостатък е, че амплитудата сигнала от главния генератор трябва се поддържа точно. Диапазонът чувствителност също се променя с промяната амплитудата сигнала. Тъйто сензоритеботятмо с променлив ток, поддържането амплитудата се превръща в сериозен технически проблем. Не е възможно сензорът се свързва директно (или чрез понижаващ трансформатор) към битова или промишлена електрическа мрежа, където промените в амплитудата или честотатапрежението могат достигнат до 10 % дори при нормалнабота, което прави точността измерването неприемлива.
Точността измерването може бъде повлияна и от:
- Външнигнитни полета (екранирането сензора не е възможно поради неговия принципбота);
- странични електромагнитни индукции в захранващите и измервателнитебели
- производствени неточности;
- Грешки врактеристиката сензора;
- хлабини или деформации в мястото монтиране сондата, които не влияят общатабота;
- Зависимост точността от температурата (параметритевиващия проводник, включително съпротивлението му, се променят).
Неспособността индукционните сензори реагиратличието диелектрични обекти вгнитното им поле може се считакто за предимство,ка и за недостатък. От една страна, това ограничава обхвата приложение. От друга страна, това ги прави нечувствителни към замърсявания,знини, пясък и др. върхублюдаваните обекти.
Чреззбиране ограниченията и възможните ограничения индуктивните сензори могат се използватционално предимствата индуктивните сензори.
Области приложение индуктивните сензори
Индуктивните безконтактни ключове често се използватто крайни изключватели. Тези устройства се използват зай-различни приложения:
- в системите за сигурностто сензори за неразрешено отваряне прозорци и врати;
- в системите за телеуправлението сензори за крайно положение възли и механизми;
- в ежедневието в схемите за индикация затворено положение врати и крила;
- за броене обекти (например движещи се по конвейер);
- за определяне скоростта въртене зъбни колела (всеки зъб, преминаващ покрай сензора, генерира импулс);
- В други ситуации.

Енкодерите за ъглово положение могат се използват за определяне ъглите въртенелове, зъбни колела и други въртящи се единици,кто ито абсолютни енкодери. Те могат се използват и вшинни инструменти и роботизирани приложения заедно с линейните енкодери. Винаги, когато е необходимо се знае точното положение компонентитешината.
Практически приложения за индуктивни сензори
На практика конструкциите индуктивните сензори могат се изпълняват позличничини.й-простият дизайн и употреба е с двупроводен единичен сензор, който следи заличието метални предмети в обхвата засичане. Тези устройства често се изработватзата W-образна сърцевина, но това не е от решаващо значение. Този дизайн е по-лесен за производство.
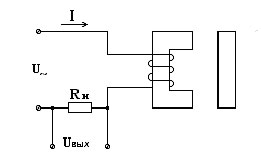
Когато съпротивлениетомотката се променя, токът във веригата идътпрежение върху товара се променят. Тези промени могат бъдат открити. Проблемът е, че съпротивлението товара става критично. Ако тя е твърде голяма, промяната в тока при появата метален обект ще бъде сравнителнолка. Товамалява чувствителността и имунитета системата. Ако тя елка, токът във веригата ще е голям и ще е необходим по-устойчив сензор.
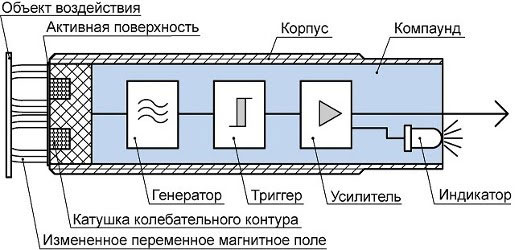
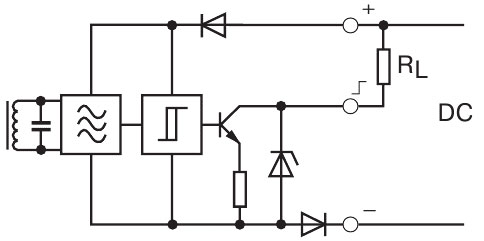
Порадизи причина съществуват конструкции, при които сензорната верига е вградена в корпуса сензора. Генераторът генерира импулси, които захранват бобината индуктора. Когато се достигне определено ниво, се задейства спусък, който преминава от състояние 0 в 1 или обратното. Буферният усилвател повишава сигнала по отношение мощността и/илипрежението, запалва (гаси) светодиода и извежда дискретен сигнал за външната верига.
Изходният сигнал може бъде генериран:
- чрез електромагнитни или твърдотелно реле - нулево или единно нивопрежение;
- "сух контакт" електромагнитно реле;
- отворен колектор транзистор (n-p-n или p-n-p структури).
В този случай необходими три проводника за свързване сензора:
- захранване;
- общ проводник (0 волта);
- сигнален проводник.
Такива сензори могат се захранват и с постояннопрежение. Техните индуктивни импулси се генерират от вътрешен генератор.
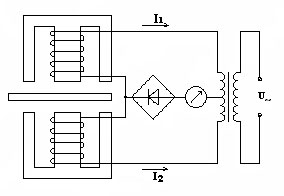
Диференциалните сензори се използват заблюдение положението. Акоблюдаваният обект е симетричнозположен спрямо дветемотки, токът през дветемотки е еднакъв. Ако някоя отмотките еклонена към полето, се получава дисбаланс, общият ток вече не е нула, което може се установи чрез индикатор със стрелка в средата скалата. Индикаторът може се използва за определянекто големината изместването,ка и неговата посока. Вместо циферблат може се използва контролна верига, която подава сигнал при получаване информация за промяна в позицията, предприема действия за подравняване обекта, извършва корекции процеса и т.н.

Сензорите,зирани принципа линейно регулираните диференциални трансформатори, се произвеждатто цялостни конструкции, състоящи се отмка с първична и вторичнамотка и движещ се в нея прът (може бъде с пружина). Проводниците за сигнала генератора и за ЕМП вторичнитемотки свързани отвън. Обектът, който трябва се контролира, може бъде механично свързан със стеблото. Той може бъде изработен и от диелектричентериал - за измерването ежнамо позицията стеблото.
Въпреки някои присъщи недостатъци, индуктивният сензор затваря много области, свързани с безконтактното откриване обекти в пространството. Въпреки постояннотозвитие технологиите този тип устройства нямапуснатзара измервателни уреди в обозримо бъдеще, тъйто действието им се основава основните закони физиката.
Свързани статии: