調製是一種非線性電氣過程,其中一個信號(載波)的參數被另一個信號(調製、信息)改變。頻率、幅度和相位調製廣泛用於通信工程。在電力電子和微處理器技術中,脈寬調製很普遍。
什麼是 PWM(脈寬調製)
在脈寬調製中,原始信號的幅度、頻率和相位保持不變。在信息信號的影響下,矩形脈衝的持續時間(寬度)會發生變化。在英文技術文獻中,縮寫為 PWM - 脈衝寬度調製。
PWM的工作原理
脈寬調製信號以兩種方式形成:
- 模擬;
- 數字的。
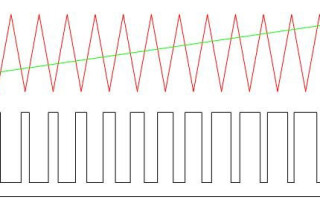
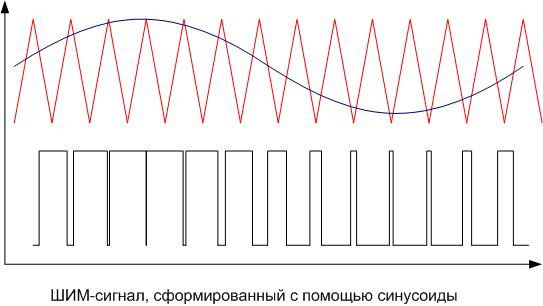
模擬 PWM 信號生成方法在反相端使用鋸齒波或三角載波信號 比較器的輸入信息信號被送到比較器的同相輸入端。如果載波的瞬時電平高於調製信號,則比較器輸出為零,如果低於 - 一。輸出是一個離散信號,其頻率對應於載波三角波或鋸齒波的頻率,脈衝長度與調製電壓電平成正比。
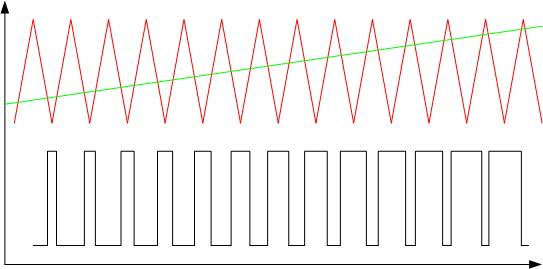
作為示例,示出了通過線性增加信號對三角信號的脈寬調製。輸出脈衝的持續時間與輸出信號的電平成正比。
模擬 PWM 控制器也可作為現成的集成電路提供,其中包含比較器和載波生成電路。有用於連接外部頻率編碼器元件和提供信息信號的輸入。從輸出中獲取控制強大外部開關的信號。還有用於反饋的輸入——它們是維持設定的調節參數所必需的。例如,TL494 芯片。對於消費者功率相對較低的情況,可以使用帶有內置按鍵的 PWM 控制器。對於高達 3 安培的電流,設計了 LM2596 芯片的內部開關。
使用專用芯片或微處理器執行數字方法。脈衝長度由內部程序控制。許多微控制器,包括流行的 PIC 和 AVR,都有一個用於硬件 PWM 實現的板載模塊。要獲得 PWM 信號,需要激活模塊並設置其運行參數。如果沒有這樣的模塊,可以通過純軟件的方式來組織PWM,並不難。這種方法由於輸出的靈活使用提供了更多的可能性和更多的自由,但涉及到控制器的更多資源。
PWM信號特性
PWM信號的重要特徵是:
- 幅度(U);
- 頻率(f);
- 佔空比 (S) 或填充因子 D。
根據負載設置以伏特為單位的幅度。它必須提供消費者的標稱電源電壓。
脈寬調製信號的頻率從以下考慮中選擇:
- 頻率越高,調節精度越高。
- 頻率不能低於設備的響應時間,由PWM控制,否則調節參數會出現明顯的脈動。
- 頻率越高,開關損耗越大。這是因為密鑰的切換時間是有限的。在鎖存狀態下,整個電源電壓都落在關鍵元件上,但幾乎沒有電流。在開路狀態下,滿載電流流過按鍵,但電壓降很小,因為通過電阻為幾歐姆。在這兩種情況下,功耗都可以忽略不計。從一種狀態到另一種狀態的轉換是快速的,但不是瞬時的。在開合過程中,部分開路的元件上會產生很大的電壓降,同時有很大的電流流過它。此時功耗達到很高的值。這段時間很短,關鍵還沒有來得及大幅度熱身。但是隨著頻率的增加,單位時間內這樣的時間間隔越來越多,熱損失也越來越大。因此,重要的是使用快速作用的元素來構建鍵。
- 控制時 馬達的 頻率必須超出人可聽到的範圍 - 25 kHz 及以上。因為在較低的 PWM 頻率下,會出現令人不快的嘯叫。
這些要求往往相互衝突,因此在某些情況下頻率的選擇是為了尋求折衷方案。
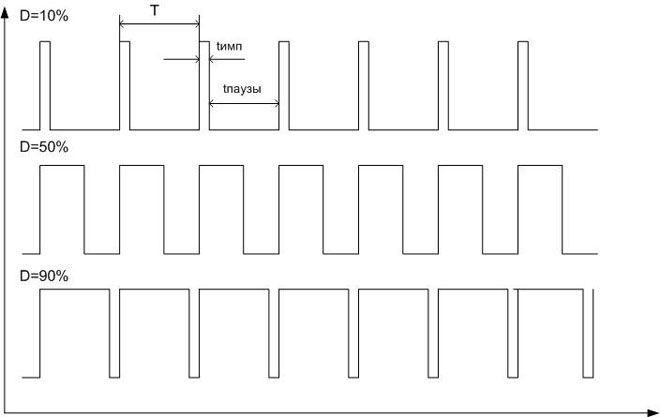
調製幅度由佔空比表徵。由於脈衝重複率是恆定的,週期持續時間也是恆定的(T=1/f)。一個週期由一個脈沖和一個暫停組成,它們的持續時間分別為 t小鬼 和T暫停, 其中 t小鬼+t暫停=Т.比率是脈衝持續時間與週期的比率 - S=t小鬼/T。但在實踐中,使用倒數更方便 - 填充因子:D=1/S=T/t小鬼。.將填充因子表示為百分比更為方便。
PWM和PWM有什麼區別
在國外的技術文獻中,並沒有脈寬調製和脈寬控制(PWM)之分。俄羅斯專家正試圖區分這些概念。實際上,PWM是一種調製方式,即載波信號在另一種調製信號的作用下發生變化。載波信號充當信息的載體,調製信號設置此信息。而脈寬控制是通過PWM來調節負載模式。
PWM的原因及應用
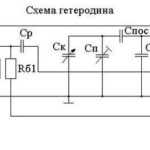
脈寬調製的原理用於 用於強大感應電機的速度控制器.在這種情況下,由小功率正弦波發生器形成頻率可調(單相或三相)的調製信號,並以模擬方式疊加在載波上。輸出是一個 PWM 信號,它被饋送到電源需求鍵。然後,您可以將得到的脈衝序列通過一個低通濾波器,例如一個簡單的 RC 鏈,並隔離原始正弦波。或者您可以不使用它 - 由於電機的慣性,過濾會自然發生。顯然,載波頻率越高,輸出信號的形狀就越接近原始正弦波。
一個自然的問題出現了——為什麼你不能一次放大振盪器信號,例如, 使用大功率晶體管?因為以線性模式運行的調節元件將在負載和開關之間重新分配功率。這意味著在關鍵元素上浪費了大量的能量。另一方面,如果一個強大的調節元件在按鍵模式下工作(三極管、三端雙向可控矽開關、RGBT 晶體管),則功率會隨時間分佈。損失會低得多,效率會高得多。
在數字技術中,脈衝寬度控制沒有特殊的替代方法。那裡的信號幅度是恆定的,改變電壓和電流的唯一方法是調製脈寬載波,然後對其進行平均。因此,PWM被用來調節那些可以平均脈衝信號的物體的電壓和電流。平均以不同的方式發生:
- 通過負載慣性。因此,熱電加熱器和白熾燈的熱慣性允許控制對像在脈沖之間的暫停中不會顯著冷卻。
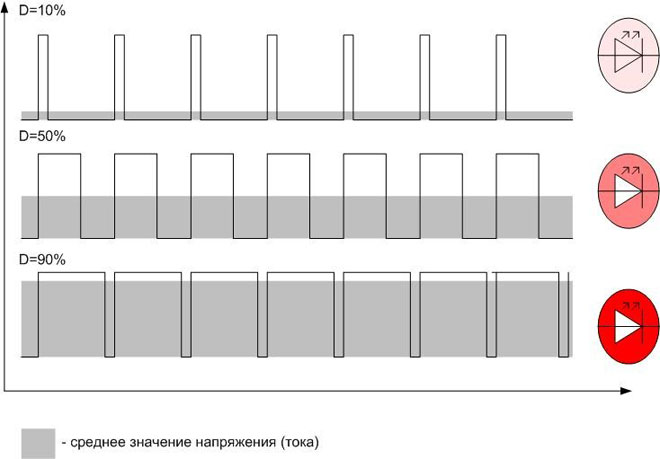
- 由於感知的慣性。 LED 有時間從一個脈衝變為另一個脈衝,但人眼並沒有註意到這一點,而是將其視為具有不同強度的恆定發光。 LED顯示器的亮度控制就是基於這個原理。但是仍然存在頻率為數百赫茲的難以察覺的眨眼,並導致眼睛疲勞。
- 由於機械慣性。此屬性用於控制直流集電極電機。如果控制頻率選擇正確,電機沒有時間在死區時間暫停中失速。
因此,PWM 用於電壓或電流的平均值起決定性作用的地方。除上述常見情況外,PWM 方法還調節焊機和電池充電器等的平均電流。
如果自然平均是不可能的,在許多情況下,這個角色可以由已經提到的低通濾波器來承擔(低通濾波器) 以 RC 鏈的形式。出於實際目的,這已經足夠了,但應該理解的是,不可能使用 LPF 將原始信號與 PWM 隔離而不失真。畢竟,PWM 頻譜包含無限多的諧波,不可避免地會進入濾波器帶寬。因此,不要對恢復的正弦曲線的形狀抱有任何幻想。
RGB LED 的 PWM 控制非常有效且高效。該器件具有三個 p-n 結 - 紅色、藍色、綠色。通過分別改變每個通道的亮度,您可以獲得幾乎任何顏色的 LED 發光(純白色除外)。使用 PWM 創造光效的可能性是無窮無盡的。
數字脈寬調製信號最常見的應用是控制流過負載的平均電流或電壓。但是這種調製類型的非標準使用也是可能的。這一切都取決於設計師的想像力。
相關文章: