మాడ్యులేషన్ అనేది నాన్-లీనియర్ ఎలక్ట్రికల్ ప్రక్రియ, దీనిలో ఒక సిగ్నల్ (క్యారియర్) యొక్క పారామితులు మరొక సిగ్నల్ (మాడ్యులేటింగ్, సమాచారం) ద్వారా మార్చబడతాయి. కమ్యూనికేషన్ ఇంజనీరింగ్లో ఫ్రీక్వెన్సీ, యాంప్లిట్యూడ్ మరియు ఫేజ్ మాడ్యులేషన్ విస్తృతంగా ఉపయోగించబడుతున్నాయి. పవర్ ఎలక్ట్రానిక్స్ మరియు మైక్రోప్రాసెసర్ టెక్నాలజీలో పల్స్-వెడల్పు మాడ్యులేషన్ విస్తృతంగా ఉంది.
కంటెంట్లు
PWM అంటే ఏమిటి (పల్స్-వెడల్పు మాడ్యులేషన్)
పల్స్-వెడల్పు మాడ్యులేషన్లో అసలు సిగ్నల్ యొక్క వ్యాప్తి, ఫ్రీక్వెన్సీ మరియు దశ మారవు. సమాచార సిగ్నల్ ప్రభావంతో దీర్ఘచతురస్రాకార పల్స్ యొక్క వ్యవధి (వెడల్పు) మార్చడానికి లోబడి ఉంటుంది. ఆంగ్ల సాంకేతిక సాహిత్యంలో ఇది PWM - పల్స్-వెడల్పు మాడ్యులేషన్ అనే సంక్షిప్తీకరణతో సూచించబడుతుంది.
PWM యొక్క పని సూత్రం
పల్స్-వెడల్పు-మాడ్యులేటెడ్ సిగ్నల్ రెండు విధాలుగా ఏర్పడుతుంది:
- అనలాగ్;
- డిజిటల్.
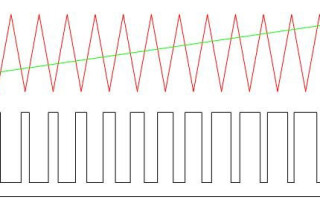
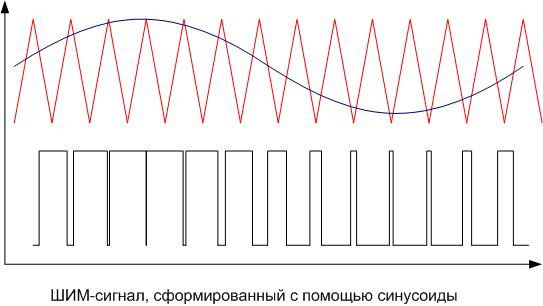
అనలాగ్ PWM సిగ్నల్ జనరేషన్ పద్ధతి ఇన్వర్టింగ్ వద్ద సాటూత్ లేదా త్రిభుజాకార క్యారియర్ సిగ్నల్ను ఉపయోగిస్తుంది కంపారిటర్ యొక్క ఇన్పుట్మరియు సమాచార సంకేతం కంపారిటర్ యొక్క నాన్-ఇన్వర్టింగ్ ఇన్పుట్కు పంపబడుతుంది. క్యారియర్ యొక్క తక్షణ స్థాయి మాడ్యులేటింగ్ సిగ్నల్ కంటే ఎక్కువగా ఉంటే, కంపారిటర్ అవుట్పుట్ సున్నా, తక్కువగా ఉంటే - ఒకటి.అవుట్పుట్ అనేది క్యారియర్ ట్రయాంగిల్ లేదా సాటూత్ యొక్క ఫ్రీక్వెన్సీకి సంబంధించిన ఫ్రీక్వెన్సీతో కూడిన వివిక్త సిగ్నల్ మరియు మాడ్యులేటింగ్ వోల్టేజ్ స్థాయికి అనులోమానుపాతంలో ఉండే పల్స్ పొడవు.
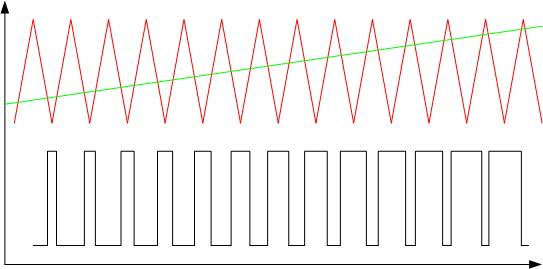
ఉదాహరణగా, త్రిభుజాకార సిగ్నల్ యొక్క పల్స్ వెడల్పు మాడ్యులేషన్ సరళ-పెరుగుతున్న సిగ్నల్ ద్వారా చూపబడింది. అవుట్పుట్ పప్పుల వ్యవధి అవుట్పుట్ సిగ్నల్ స్థాయికి అనులోమానుపాతంలో ఉంటుంది.
అనలాగ్ PWM కంట్రోలర్లు ఆఫ్-ది-షెల్ఫ్ ఇంటిగ్రేటెడ్ సర్క్యూట్లుగా కూడా అందుబాటులో ఉన్నాయి, ఇవి కంపారిటర్ మరియు క్యారియర్ జనరేషన్ సర్క్యూట్రీని కలిగి ఉంటాయి. బాహ్య ఫ్రీక్వెన్సీ ఎన్కోడర్ మూలకాలను కనెక్ట్ చేయడానికి మరియు సమాచార సిగ్నల్ను సరఫరా చేయడానికి ఇన్పుట్లు ఉన్నాయి. అవుట్పుట్ నుండి, శక్తివంతమైన బాహ్య స్విచ్లను నియంత్రించే సిగ్నల్ తీసుకోబడుతుంది. ఫీడ్బ్యాక్ కోసం ఇన్పుట్లు కూడా ఉన్నాయి - సెట్ రెగ్యులేషన్ పారామితులను నిర్వహించడానికి అవి అవసరం. ఇది, ఉదాహరణకు, TL494 చిప్. వినియోగదారు శక్తి సాపేక్షంగా తక్కువగా ఉన్న సందర్భాలలో, అంతర్నిర్మిత కీలతో PWM కంట్రోలర్లు అందుబాటులో ఉన్నాయి. 3 ఆంప్స్ వరకు ప్రవాహాల కోసం LM2596 చిప్ యొక్క అంతర్గత స్విచ్ రూపొందించబడింది.
ప్రత్యేక చిప్స్ లేదా మైక్రోప్రాసెసర్లను ఉపయోగించి డిజిటల్ పద్ధతిని నిర్వహిస్తారు. పల్స్ పొడవు అంతర్గత ప్రోగ్రామ్ ద్వారా నియంత్రించబడుతుంది. జనాదరణ పొందిన PIC మరియు AVRతో సహా అనేక మైక్రోకంట్రోలర్లు హార్డ్వేర్ PWM అమలు కోసం మాడ్యూల్ ఆన్బోర్డ్ను కలిగి ఉన్నాయి. PWM సిగ్నల్ పొందడానికి మాడ్యూల్ను సక్రియం చేయడం మరియు దాని ఆపరేటింగ్ పారామితులను సెట్ చేయడం అవసరం. అటువంటి మాడ్యూల్ లేనట్లయితే, మీరు PWM ను పూర్తిగా సాఫ్ట్వేర్ పద్ధతి ద్వారా నిర్వహించవచ్చు, ఇది కష్టం కాదు. ఈ పద్ధతి మరిన్ని అవకాశాలను ఇస్తుంది మరియు అవుట్పుట్ల యొక్క సౌకర్యవంతమైన ఉపయోగం కారణంగా మరింత స్వేచ్ఛను ఇస్తుంది, కానీ నియంత్రిక యొక్క మరిన్ని వనరులను కలిగి ఉంటుంది.
PWM సిగ్నల్ లక్షణాలు
PWM సిగ్నల్ యొక్క ముఖ్యమైన లక్షణాలు:
- వ్యాప్తి (U);
- ఫ్రీక్వెన్సీ (ఎఫ్);
- డ్యూటీ సైకిల్ (S) లేదా ఫిల్ ఫ్యాక్టర్ D.
వోల్ట్లలో వ్యాప్తి లోడ్పై ఆధారపడి సెట్ చేయబడింది. ఇది వినియోగదారు యొక్క నామమాత్రపు సరఫరా వోల్టేజీని అందించాలి.
పల్స్-వెడల్పు మాడ్యులేటెడ్ సిగ్నల్ యొక్క ఫ్రీక్వెన్సీ క్రింది పరిశీలనల నుండి ఎంపిక చేయబడింది:
- ఎక్కువ ఫ్రీక్వెన్సీ, రెగ్యులేషన్ ఖచ్చితత్వం ఎక్కువ.
- PWM ద్వారా నియంత్రించబడే పరికరం యొక్క ప్రతిస్పందన సమయం కంటే ఫ్రీక్వెన్సీ తక్కువగా ఉండకూడదు, లేకుంటే నియంత్రిత పరామితి యొక్క గుర్తించదగిన పల్సేషన్లు ఉంటాయి.
- ఎక్కువ ఫ్రీక్వెన్సీ, స్విచ్చింగ్ నష్టాలు ఎక్కువ. కీ యొక్క స్విచ్చింగ్ సమయం పరిమితం కావడం దీనికి కారణం. లాక్డ్ స్టేట్లో, మొత్తం సరఫరా వోల్టేజ్ కీ మూలకంపై వస్తుంది, కానీ దాదాపు కరెంట్ లేదు. ఓపెన్ స్టేట్లో, పూర్తి లోడ్ కరెంట్ కీ ద్వారా ప్రవహిస్తుంది, అయితే వోల్టేజ్ డ్రాప్ చిన్నది ఎందుకంటే పాస్-త్రూ రెసిస్టెన్స్ కొన్ని ఓమ్లు. రెండు సందర్భాల్లో, విద్యుత్ వెదజల్లడం చాలా తక్కువ. ఒక స్థితి నుండి మరొక స్థితికి మారడం వేగంగా ఉంటుంది, కానీ తక్షణమే కాదు. ఓపెన్-క్లోజ్ ప్రక్రియలో పాక్షికంగా తెరిచిన మూలకంపై పెద్ద వోల్టేజ్ పడిపోతుంది మరియు అదే సమయంలో దాని ద్వారా ఒక ముఖ్యమైన ప్రవాహం ప్రవహిస్తుంది. ఈ సమయంలో శక్తి వెదజల్లడం అధిక విలువలకు చేరుకుంటుంది. ఈ కాలం తక్కువగా ఉంటుంది, కీకి గణనీయంగా వేడెక్కడానికి సమయం లేదు. కానీ ఫ్రీక్వెన్సీ పెరిగేకొద్దీ, యూనిట్ సమయానికి అలాంటి సమయ విరామాలు ఎక్కువగా ఉంటాయి మరియు ఉష్ణ నష్టం పెరుగుతుంది. అందువల్ల, కీల నిర్మాణం కోసం వేగంగా పనిచేసే అంశాలను ఉపయోగించడం చాలా ముఖ్యం.
- నియంత్రించేటప్పుడు ఒక మోటార్ ఫ్రీక్వెన్సీ మనిషికి వినిపించే పరిధికి మించి సీసం ఉండాలి - 25 kHz మరియు అంతకంటే ఎక్కువ. ఎందుకంటే తక్కువ PWM పౌనఃపున్యాల వద్ద, అసహ్యకరమైన విజిల్ ఏర్పడుతుంది.
ఈ అవసరాలు తరచుగా ఒకదానికొకటి విరుద్ధంగా ఉంటాయి, కాబట్టి కొన్ని సందర్భాల్లో ఫ్రీక్వెన్సీ ఎంపిక అనేది రాజీ కోసం అన్వేషణ.
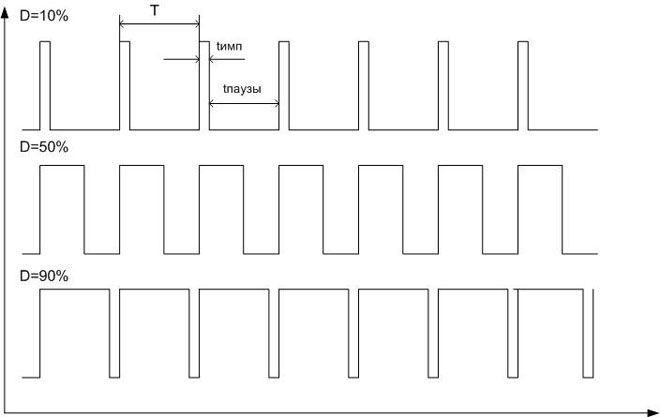
మాడ్యులేషన్ యొక్క పరిమాణం విధి చక్రం ద్వారా వర్గీకరించబడుతుంది. పల్స్ పునరావృత రేటు స్థిరంగా ఉన్నందున, కాల వ్యవధి కూడా స్థిరంగా ఉంటుంది (T=1/f). ఒక పీరియడ్లో పల్స్ మరియు పాజ్ ఉంటాయి, వీటికి వరుసగా వ్యవధి ఉంటుంది, tఇంప్ మరియు Tవిరామం, ఎక్కడ టిఇంప్+tవిరామం=టీ. నిష్పత్తి అనేది కాలానికి పల్స్ వ్యవధి యొక్క నిష్పత్తి - S=tఇంప్/టి.కానీ ఆచరణలో విలోమ విలువను ఉపయోగించడం మరింత సౌకర్యవంతంగా మారింది - పూరక కారకం: D=1/S=T/tఇంప్.. పూరక కారకాన్ని శాతంగా వ్యక్తీకరించడం మరింత సౌకర్యవంతంగా ఉంటుంది.
PWM మరియు PWM మధ్య తేడా ఏమిటి
విదేశీ సాంకేతిక సాహిత్యంలో, పల్స్-వెడల్పు మాడ్యులేషన్ మరియు పల్స్-వెడల్పు నియంత్రణ (PWM) మధ్య వ్యత్యాసం లేదు. రష్యన్ నిపుణులు ఈ భావనల మధ్య తేడాను గుర్తించడానికి ప్రయత్నిస్తున్నారు. వాస్తవానికి, PWM అనేది ఒక రకమైన మాడ్యులేషన్, అనగా, మరొక చర్యలో క్యారియర్ సిగ్నల్లో మార్పు, మాడ్యులేటింగ్ సిగ్నల్. క్యారియర్ సిగ్నల్ సమాచారం యొక్క క్యారియర్గా పనిచేస్తుంది మరియు మాడ్యులేటింగ్ సిగ్నల్ ఈ సమాచారాన్ని సెట్ చేస్తుంది. మరియు పల్స్ వెడల్పు నియంత్రణ అనేది PWM ద్వారా లోడ్ మోడ్ యొక్క నియంత్రణ.
PWM కోసం కారణాలు మరియు అప్లికేషన్లు
పల్స్-వెడల్పు మాడ్యులేషన్ సూత్రం ఉపయోగించబడుతుంది శక్తివంతమైన ఇండక్షన్ మోటార్లు కోసం స్పీడ్ కంట్రోలర్లు. ఈ సందర్భంలో, సర్దుబాటు చేయగల ఫ్రీక్వెన్సీ (సింగిల్-ఫేజ్ లేదా త్రీ-ఫేజ్) యొక్క మాడ్యులేటింగ్ సిగ్నల్ తక్కువ-పవర్ సైన్ వేవ్ జనరేటర్ ద్వారా ఏర్పడుతుంది మరియు అనలాగ్ మార్గంలో క్యారియర్పై సూపర్మోస్ చేయబడుతుంది. అవుట్పుట్ అనేది PWM సిగ్నల్, ఇది పవర్ డిమాండ్ కీలకు అందించబడుతుంది. అప్పుడు మీరు ఒక సాధారణ RC-చైన్ వంటి తక్కువ-పాస్ ఫిల్టర్ ద్వారా పప్పుల ఫలిత క్రమాన్ని పంపవచ్చు మరియు అసలైన సైనూసోయిడ్ను వేరు చేయవచ్చు. లేదా మీరు లేకుండా చేయవచ్చు - మోటార్ యొక్క జడత్వం కారణంగా వడపోత సహజంగా జరుగుతుంది. సహజంగానే, క్యారియర్ ఫ్రీక్వెన్సీ ఎక్కువగా ఉంటే, అవుట్పుట్ సిగ్నల్ యొక్క ఆకారం అసలు సైనూసోయిడ్కు దగ్గరగా ఉంటుంది.
సహజమైన ప్రశ్న తలెత్తుతుంది - మీరు ఓసిలేటర్ సిగ్నల్ను ఒకేసారి ఎందుకు విస్తరించలేరు, ఉదాహరణకు, అధిక శక్తి ట్రాన్సిస్టర్లు ఉపయోగించి? ఎందుకంటే లీనియర్ మోడ్లో పనిచేసే రెగ్యులేటింగ్ ఎలిమెంట్, లోడ్ మరియు స్విచ్ మధ్య శక్తిని పునఃపంపిణీ చేస్తుంది. దీని అర్థం కీ మూలకంపై చాలా శక్తి వృధా అవుతుంది. మరోవైపు, శక్తివంతమైన నియంత్రణ మూలకం కీ మోడ్లో (ట్రినిస్టర్లు, ట్రైయాక్లు, RGBT ట్రాన్సిస్టర్లు) పని చేస్తే, శక్తి కాలక్రమేణా పంపిణీ చేయబడుతుంది.నష్టాలు చాలా తక్కువగా ఉంటాయి మరియు సామర్థ్యం చాలా ఎక్కువగా ఉంటుంది.
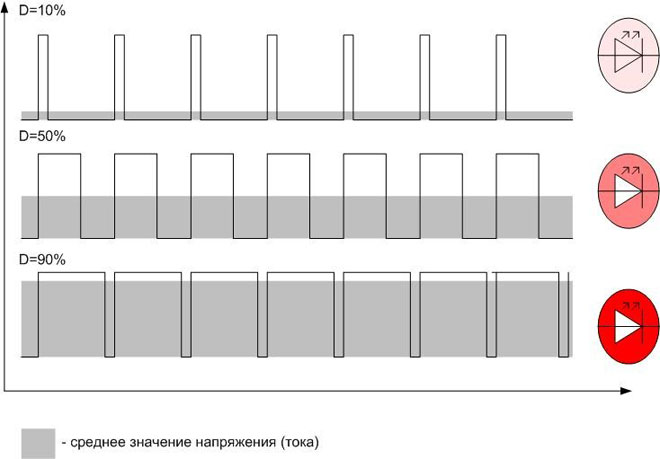
డిజిటల్ టెక్నాలజీలో, పల్స్ వెడల్పు నియంత్రణకు ప్రత్యేక ప్రత్యామ్నాయం లేదు. సిగ్నల్ వ్యాప్తి అక్కడ స్థిరంగా ఉంటుంది మరియు వోల్టేజ్ మరియు కరెంట్ను మార్చడానికి ఏకైక మార్గం పల్స్ వెడల్పు క్యారియర్ను మాడ్యులేట్ చేసి ఆపై దానిని సగటు చేయడం. అందువల్ల, పల్స్ సిగ్నల్ను సగటున చేయగల వస్తువుల వద్ద వోల్టేజ్ మరియు కరెంట్ను నియంత్రించడానికి PWM ఉపయోగించబడుతుంది. సగటు వివిధ మార్గాల్లో జరుగుతుంది:
- లోడ్ జడత్వం ద్వారా. అందువలన, థర్మోఎలెక్ట్రిక్ హీటర్లు మరియు ప్రకాశించే దీపాల యొక్క ఉష్ణ జడత్వం నియంత్రణ వస్తువులు పప్పుల మధ్య విరామాలలో గమనించదగ్గ విధంగా చల్లబరుస్తుంది.
- అవగాహన యొక్క జడత్వం కారణంగా. LED పల్స్ నుండి పల్స్ వరకు ఫేడ్ చేయడానికి సమయం ఉంది, కానీ మానవ కన్ను దీనిని గమనించదు మరియు వివిధ తీవ్రతతో స్థిరమైన గ్లోగా గ్రహిస్తుంది. LED మానిటర్ల ప్రకాశం నియంత్రణ ఈ సూత్రంపై ఆధారపడి ఉంటుంది. కానీ అనేక వందల హెర్ట్జ్ల ఫ్రీక్వెన్సీతో కనిపించని బ్లింక్ ఇప్పటికీ ఉంది మరియు కంటి అలసటను కలిగిస్తుంది.
- యాంత్రిక జడత్వం కారణంగా. ఈ ఆస్తి DC కలెక్టర్ మోటార్లను నియంత్రించడానికి ఉపయోగించబడుతుంది. నియంత్రణ పౌనఃపున్యం సరిగ్గా ఎంపిక చేయబడితే, మోటారు చనిపోయిన సమయ పాజ్లలో నిలిచిపోయే సమయాన్ని కలిగి ఉండదు.
అందువల్ల, వోల్టేజ్ లేదా కరెంట్ యొక్క సగటు విలువ నిర్ణయాత్మక పాత్ర పోషిస్తున్న చోట PWM ఉపయోగించబడుతుంది. పేర్కొన్న సాధారణ కేసులతో పాటు, PWM పద్ధతి వెల్డింగ్ యంత్రాలు మరియు బ్యాటరీ ఛార్జర్లు మొదలైన వాటిలో సగటు కరెంట్ను నియంత్రిస్తుంది.
సహజ సగటు సాధ్యం కాకపోతే, అనేక సందర్భాల్లో ఈ పాత్రను ఇప్పటికే పేర్కొన్న తక్కువ-పాస్ ఫిల్టర్ ద్వారా ఊహించవచ్చు (LPF) RC-చైన్ రూపంలో. ఆచరణాత్మక ప్రయోజనాల కోసం ఇది సరిపోతుంది, కానీ వక్రీకరణ లేకుండా LPF తో PWM నుండి అసలు సిగ్నల్ను వేరుచేయడం అసాధ్యం అని అర్థం చేసుకోవాలి. అన్నింటికంటే, PWM స్పెక్ట్రమ్ అనంతమైన పెద్ద సంఖ్యలో హార్మోనిక్స్ను కలిగి ఉంది, ఇది అనివార్యంగా ఫిల్టర్ బ్యాండ్విడ్త్లోకి వస్తుంది.అందువల్ల, పునరుద్ధరించబడిన సైనోసోయిడ్ ఆకారం గురించి ఎటువంటి భ్రమలు కలిగి ఉండకండి.
RGB LED యొక్క PWM నియంత్రణ చాలా ప్రభావవంతమైనది మరియు సమర్థవంతమైనది. ఈ పరికరం మూడు p-n జంక్షన్లను కలిగి ఉంది - ఎరుపు, నీలం, ఆకుపచ్చ. ప్రతి ఛానెల్ యొక్క ప్రకాశాన్ని విడిగా మార్చడం ద్వారా, మీరు LED గ్లో యొక్క దాదాపు ఏదైనా రంగును పొందవచ్చు (స్వచ్ఛమైన తెలుపు తప్ప). PWMతో కాంతి ప్రభావాలను సృష్టించే అవకాశాలు అంతులేనివి.
డిజిటల్ పల్స్ వెడల్పు మాడ్యులేటెడ్ సిగ్నల్ యొక్క అత్యంత సాధారణ అనువర్తనం లోడ్ ద్వారా ప్రవహించే సగటు కరెంట్ లేదా వోల్టేజ్ని నియంత్రించడం. కానీ ఈ రకమైన మాడ్యులేషన్ యొక్క ప్రామాణికం కాని ఉపయోగం కూడా సాధ్యమే. ఇది అన్ని డిజైనర్ యొక్క ఊహ మీద ఆధారపడి ఉంటుంది.
సంబంధిత కథనాలు: