வேறுபட்ட விகிதாச்சார-ஒருங்கிணைந்த சீராக்கி என்பது ஒரு குறிப்பிட்ட அளவுருவை மாற்றும் திறனைப் பராமரிக்க தானியங்கி அமைப்புகளில் நிறுவப்பட்ட ஒரு சாதனமாகும்.
முதல் பார்வையில் இது குழப்பமாக உள்ளது, ஆனால் நீங்கள் PID ஒழுங்குமுறை மற்றும் டம்மிகளுக்கு விளக்கலாம், அதாவது. மின்னணு அமைப்புகள் மற்றும் சாதனங்களைப் பற்றி அதிகம் அறிந்திராத நபர்கள்.
உள்ளடக்கம்
PID ரெகுலேட்டர் என்றால் என்ன?
PID ரெகுலேட்டர் என்பது கட்டுப்பாட்டு சுற்றுக்குள் கட்டாய பின்னூட்டத்துடன் கட்டமைக்கப்பட்ட ஒரு சாதனமாகும். இது செட் பாயிண்ட்களின் செட் நிலைகளை பராமரிக்க வடிவமைக்கப்பட்டுள்ளது, எடுத்துக்காட்டாக, காற்று வெப்பநிலை.
சாதனம் சென்சார்கள் அல்லது சென்சார்களிடமிருந்து பெறப்பட்ட தரவுகளின் அடிப்படையில் கட்டுப்பாட்டுச் சாதனத்திற்கு கட்டுப்பாட்டு சமிக்ஞை அல்லது வெளியீட்டு சமிக்ஞையை அனுப்புகிறது. கட்டுப்படுத்திகள் அதிக நிலையற்ற துல்லியம் மற்றும் செட் பணியை நிறைவேற்றும் தரம் ஆகியவற்றைக் கொண்டுள்ளன.
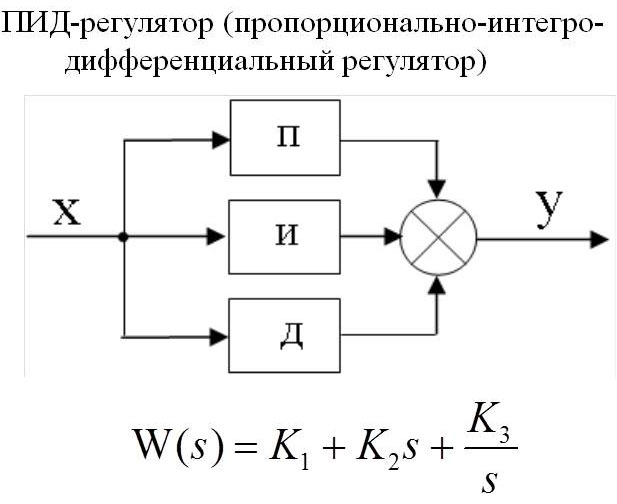
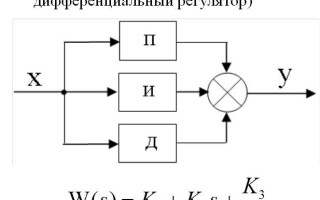
PID கட்டுப்படுத்தியின் மூன்று குணகங்கள் மற்றும் செயல்பாட்டுக் கொள்கை
PID கட்டுப்படுத்தியின் செயல்பாடானது, ஒழுங்குபடுத்தப்பட்ட அளவுருவை முன்னரே தீர்மானிக்கப்பட்ட மட்டத்தில் பராமரிக்க தேவையான சக்தியின் வெளியீட்டு சமிக்ஞையை வழங்குவதாகும். குறியீட்டைக் கணக்கிட, ஒரு சிக்கலான கணித சூத்திரத்தைப் பயன்படுத்தவும், இதில் 3 குணகங்கள் அடங்கும் - விகிதாசார, ஒருங்கிணைந்த, வேறுபாடு.
நீராவி மூலம் வால்வைத் திறக்கும் அளவைக் கட்டுப்படுத்துவதன் மூலம் வெப்பநிலையை முன்னரே தீர்மானிக்கப்பட்ட மட்டத்தில் பராமரிக்க வேண்டிய தண்ணீருடன் ஒரு தொட்டியை ஒழுங்குபடுத்தும் பொருளாக எடுத்துக்கொள்வோம்.
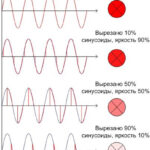
உள்ளீட்டு தரவுகளுடன் பொருந்தாத தருணத்தில் விகிதாசார கூறு தோன்றும். எளிமையான வார்த்தைகளில், இது போல் தெரிகிறது - உண்மையான வெப்பநிலை மற்றும் விரும்பிய வெப்பநிலை ஆகியவற்றுக்கு இடையேயான வேறுபாடு எடுக்கப்படுகிறது, சரிசெய்யக்கூடிய குணகத்தால் பெருக்கப்படுகிறது மற்றும் வால்வுக்குப் பயன்படுத்தப்பட வேண்டிய வெளியீட்டு சமிக்ஞை பெறப்படுகிறது. அதாவது டிகிரி வீழ்ச்சியடைந்தவுடன், வெப்பமாக்கல் செயல்முறை தொடங்கப்படுகிறது, வெப்பநிலை விரும்பிய அளவை விட உயர்ந்தவுடன், அது அணைக்கப்படும் அல்லது குளிர்ந்துவிடும்.
அடுத்ததாக ஒருங்கிணைந்த கூறு வருகிறது, இது சுற்றுச்சூழலின் விளைவுகள் அல்லது நமது வெப்பநிலையை செட் பாயிண்டில் வைத்திருப்பதில் ஏற்படும் பிற குழப்பமான தாக்கங்களுக்கு ஈடுசெய்ய வடிவமைக்கப்பட்டுள்ளது. கட்டுப்படுத்தப்படும் சாதனங்களைப் பாதிக்கும் கூடுதல் காரணிகள் எப்போதும் இருப்பதால், விகிதாசார கூறுகளைக் கணக்கிட தரவு வரும்போது எண் ஏற்கனவே மாறுகிறது. மேலும் வெளிப்புற தாக்கங்கள் அதிகமாக இருப்பதால், உருவத்தில் ஏற்ற இறக்கங்கள் அதிகமாக இருக்கும். வழங்கப்பட்ட மின்சாரத்தில் கூர்முனை உள்ளது.
ஒருங்கிணைந்த கூறு, வெப்பநிலை மதிப்பானது மாறியிருந்தால், கடந்த மதிப்புகளின் அடிப்படையில் அதைத் திரும்பப் பெற முயற்சிக்கிறது. செயல்முறை கீழே உள்ள வீடியோவில் இன்னும் விரிவாக விவரிக்கப்பட்டுள்ளது.
பின்னர், ரெகுலேட்டரின் வெளியீடு, குணகத்தின் படி, வெப்பநிலையை உயர்த்த அல்லது குறைக்க உணவளிக்கப்படுகிறது. காலப்போக்கில், வெளிப்புற காரணிகளுக்கு ஈடுசெய்யும் ஒரு மதிப்பு தேர்ந்தெடுக்கப்பட்டது, மேலும் தாவல்கள் மறைந்துவிடும்.
நிலையான பிழையைக் கணக்கிடுவதன் மூலம் பிழைகளை அகற்ற ஒருங்கிணைப்பு பயன்படுத்தப்படுகிறது. இந்த செயல்பாட்டில் முக்கிய விஷயம் சரியான குணகத்தைத் தேர்ந்தெடுப்பது, இல்லையெனில் பிழை (பொருத்தம்) ஒருங்கிணைந்த கூறுகளையும் பாதிக்கும்.
மூன்றாவது PID கூறு ஒரு வேறுபட்ட கூறு ஆகும். கணினியில் ஏற்படும் தாக்கத்திற்கும் பின்னூட்டத்திற்கும் இடையில் ஏற்படும் தாமதங்களின் விளைவை ஈடுசெய்யும் வகையில் இது வடிவமைக்கப்பட்டுள்ளது.விகிதாசார சீராக்கி வெப்பநிலை விரும்பிய புள்ளியை அடையும் வரை சக்தியை வழங்குகிறது, ஆனால் தகவல் கருவிக்கு பயணிக்கும்போது, குறிப்பாக பெரிய மதிப்புகளுடன் எப்போதும் பிழைகள் உள்ளன. இது அதிக வெப்பத்திற்கு வழிவகுக்கும். வேறுபாடு தாமதங்கள் அல்லது சுற்றுச்சூழல் தாக்கங்களால் ஏற்படும் விலகல்களை முன்னறிவிக்கிறது மற்றும் முன்கூட்டியே வழங்கப்படும் மின்சாரத்தை குறைக்கிறது.
PID கட்டுப்படுத்தியை அமைத்தல்
PID கட்டுப்படுத்தியை அமைப்பது 2 முறைகளைப் பயன்படுத்தி செய்யப்படுகிறது:
- தொகுப்பு மாதிரியின் அடிப்படையில் அளவுருக்களைக் கணக்கிடுவதை உள்ளடக்குகிறது. இத்தகைய ட்யூனிங் துல்லியமானது, ஆனால் தானியங்கி கட்டுப்பாட்டு கோட்பாட்டின் ஆழமான அறிவு தேவைப்படுகிறது. பொறியாளர்கள் மற்றும் விஞ்ஞானிகளால் மட்டுமே முடியும். ஏனெனில் ஓட்டம் பண்புகளை எடுத்து நிறைய கணக்கீடுகளை செய்ய வேண்டியது அவசியம்.
- கையேடு முறை சோதனை மற்றும் பிழை முறையை அடிப்படையாகக் கொண்டது. இந்த நோக்கத்திற்காக, ஏற்கனவே தயாராக உள்ள அமைப்பின் தரவு அடிப்படையாக எடுத்துக் கொள்ளப்படுகிறது, மேலும் ஒன்று அல்லது அதற்கு மேற்பட்ட சீராக்கி குணகங்களில் சில மாற்றங்கள் செய்யப்படுகின்றன. ஸ்விட்ச் ஆன் செய்து இறுதி முடிவைக் கவனித்த பிறகு, அளவுருக்கள் சரியான திசையில் மாற்றப்படுகின்றன. மேலும் விரும்பிய அளவிலான இயக்கத்திறனை அடையும் வரை.
பகுப்பாய்வு மற்றும் டியூனிங்கின் கோட்பாட்டு முறை நடைமுறையில் அரிதாகவே பயன்படுத்தப்படுகிறது, இது கட்டுப்பாட்டு பொருளின் சிறப்பியல்புகளின் அறியாமை மற்றும் சாத்தியமான குழப்பமான தாக்கங்கள் காரணமாகும். கணினியின் கண்காணிப்பின் அடிப்படையில் சோதனை முறைகள் மிகவும் பொதுவானவை.
நவீன தானியங்கு செயல்முறைகள் ஒழுங்குபடுத்தும் குணகங்களை சரிசெய்ய நிரல்களின் கட்டுப்பாட்டின் கீழ் சிறப்பு தொகுதிகளாக செயல்படுத்தப்படுகின்றன.
PID சீராக்கியின் நோக்கம்
PID ரெகுலேட்டர், வெப்பநிலை, அழுத்தம், தொட்டி நிலை, குழாயில் ஓட்டம், ஏதாவது ஒன்றின் செறிவு போன்ற சில மதிப்பை, தேவையான அளவில் பராமரிக்க வடிவமைக்கப்பட்டுள்ளது. அதன் அமைப்பிற்கான விகிதாசார, ஒருங்கிணைத்தல், வேறுபட்ட மதிப்புகள்.
பெரிய தொழில்கள் மற்றும் மின் உற்பத்தி நிலையங்களை கூட கட்டுப்படுத்தும் திறன் கொண்ட ஒரு துல்லியமான கட்டுப்பாட்டு சமிக்ஞையைப் பெறுவதே பயன்பாட்டின் நோக்கம்.
வெப்பநிலை கட்டுப்பாட்டு சுற்றுக்கான எடுத்துக்காட்டு
PID கட்டுப்படுத்திகள் பெரும்பாலும் வெப்பநிலை கட்டுப்பாட்டில் பயன்படுத்தப்படுகின்றன, இந்த தானியங்கி செயல்முறையைப் பார்க்க ஒரு தொட்டியில் தண்ணீரை சூடாக்குவதற்கான எளிய உதாரணத்தைப் பயன்படுத்துவோம்.
தொட்டி திரவத்தால் நிரப்பப்பட்டுள்ளது, இது தேவையான வெப்பநிலையில் சூடாக்கப்பட வேண்டும் மற்றும் விரும்பிய மட்டத்தில் பராமரிக்கப்பட வேண்டும். தொட்டியின் உள்ளே வெப்பநிலையை அளவிட ஒரு சென்சார் உள்ளது - தெர்மோகப்பிள் அல்லது எதிர்ப்பு வெப்பமானி மற்றும் PID கட்டுப்படுத்தியுடன் நேரடியாக இணைக்கப்பட்டுள்ளது.
கீழே உள்ள படத்தில் காட்டப்பட்டுள்ளபடி, தானியங்கி கட்டுப்பாட்டு வால்வுடன் திரவத்தை சூடாக்க நீராவியை வழங்குவோம். வால்வு தன்னை கட்டுப்படுத்தி இருந்து ஒரு சமிக்ஞை பெறுகிறது. ஆபரேட்டர், தொட்டியில் பராமரிக்கப்பட வேண்டிய PID கட்டுப்படுத்தியில் வெப்பநிலை செட் புள்ளி மதிப்பை உள்ளிடுகிறது.

சீராக்கி குணகங்கள் தவறாக இருந்தால், நீர் வெப்பநிலை குதிக்கும் மற்றும் வால்வு முழுமையாக திறக்கப்படும் அல்லது முழுமையாக மூடப்படும். இந்த வழக்கில் PID குணகங்கள் கணக்கிடப்பட்டு மீண்டும் உள்ளிடப்பட வேண்டும். எல்லாவற்றையும் சரியாகச் செய்தால், ஒரு குறுகிய காலத்திற்குப் பிறகு, கணினி செயல்முறையை சமன் செய்யும் மற்றும் தொட்டியில் வெப்பநிலை அமைக்கப்பட்ட புள்ளியில் பராமரிக்கப்படும், கட்டுப்பாட்டு வால்வு திறக்கும் அளவு நடுத்தர நிலையில் இருக்கும்.
தொடர்புடைய கட்டுரைகள்: