Regulator różnicowy proporcjonalno-całkująco-różniczkujący to urządzenie instalowane w systemach zautomatyzowanych w celu utrzymania określonego parametru, który może ulegać zmianie.
Na pierwszy rzut oka jest to mylące, ale możliwe jest wyjaśnienie sterowania PID także dla manekinów, tzn. osoby, które nie są zaznajomione z systemami i urządzeniami elektronicznymi.
Spis treści
Co to jest regulator PID?
Regulator PID jest urządzeniem zintegrowanym z obwodem regulacyjnym z obowiązkowym sprzężeniem zwrotnym. Jest on przeznaczony do utrzymywania poziomów zadanych, np. temperatury powietrza.
Urządzenie dostarcza sygnał sterujący lub wyjściowy do sterownika na podstawie danych otrzymanych z czujników lub nadajników. Regulatory charakteryzują się dużą dokładnością w stanach przejściowych i wysoką jakością działania.
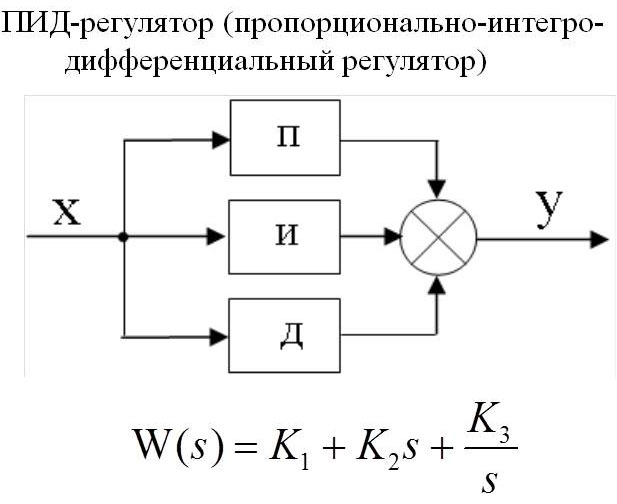
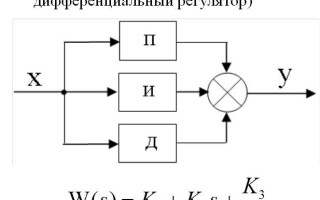
Trzy współczynniki regulatora PID i zasada działania
Zadaniem regulatora PID jest dostarczenie sygnału wyjściowego o mocy wymaganej do utrzymania kontrolowanego parametru na z góry określonym poziomie. Do obliczenia tej wartości wykorzystuje się złożony wzór matematyczny, który zawiera 3 współczynniki - proporcjonalny, całkowy i różniczkowy.
Jako obiekt regulacji przyjmijmy zbiornik z wodą, w którym konieczne jest utrzymywanie temperatury na zadanym poziomie poprzez regulację stopnia otwarcia zaworu parowego.
Składowa proporcjonalna pojawia się w momencie niedopasowania do danych wejściowych. W uproszczeniu brzmi to następująco - bierze się różnicę między temperaturą rzeczywistą a temperaturą zadaną, mnoży się ją przez regulowany współczynnik i otrzymuje się sygnał wyjściowy, który ma być podawany na zawór. Innymi słowy, gdy tylko temperatura spadnie, rozpoczyna się proces ogrzewania, a gdy wzrośnie powyżej temperatury zadanej, zostaje wyłączony lub nawet schłodzony.
Następnie pojawia się element całkujący, którego zadaniem jest kompensowanie wpływu otoczenia lub innych czynników zakłócających na utrzymanie temperatury na poziomie wartości zadanej. Ponieważ zawsze występują dodatkowe czynniki wpływające na sterowane urządzenia, liczba ta zmienia się już w momencie, gdy napływają dane do obliczenia składnika proporcjonalnego. A im większe wpływy zewnętrzne, tym większe wahania w figurze. Występują skoki mocy.
Składnik całkujący próbuje przywrócić wartość temperatury na podstawie poprzednich wartości, jeśli temperatura uległa zmianie. Proces ten opisano bardziej szczegółowo na poniższym filmie.
Następnie sygnał wyjściowy regulatora jest podawany zgodnie ze współczynnikiem w celu podniesienia lub obniżenia temperatury. Z czasem wybierana jest wartość, która kompensuje czynniki zewnętrzne, a przepięcia znikają.
Całka służy do eliminowania błędów poprzez obliczanie błędu statycznego. Najważniejsze w tym procesie jest wybranie właściwego współczynnika, gdyż w przeciwnym razie błąd (niedopasowanie) będzie miał wpływ także na składową całkową.
Trzeci składnik PID to składnik różnicowy. Ma on na celu kompensację skutków opóźnień, które występują pomiędzy oddziaływaniem na system a sprzężeniem zwrotnym. Regulator proporcjonalny dostarcza energię, dopóki temperatura nie osiągnie właściwej wartości, ale zawsze występują błędy podczas przekazywania informacji do urządzenia, zwłaszcza przy wysokich wartościach. Może to prowadzić do przegrzania. Mechanizm różnicowy przewiduje odchylenia spowodowane opóźnieniami lub wpływami otoczenia i z wyprzedzeniem zmniejsza dostarczaną moc.
Konfigurowanie regulatora PID
Regulator PID jest dostrajany za pomocą dwóch metod:
- Synteza polega na obliczeniu parametrów na podstawie modelu systemu. Takie strojenie jest dokładne, ale wymaga dogłębnej znajomości teorii sterowania automatycznego. Mogą to zrobić tylko inżynierowie i naukowcy. Ponieważ konieczne jest wykonanie charakterystyki przepływu i wielu obliczeń.
- Metoda ręczna opiera się na metodzie prób i błędów. Odbywa się to poprzez pobranie danych z już istniejącego systemu i wprowadzenie pewnych korekt do jednego lub kilku współczynników regulatora. Po włączeniu i obserwacji wyniku końcowego parametry są zmieniane w pożądanym kierunku. I tak dalej, aż do osiągnięcia pożądanego poziomu wydajności.
Teoretyczne metody analizy i strojenia są rzadko stosowane w praktyce, ze względu na brak znajomości charakterystyki obiektu sterowania oraz mnogość możliwych zakłóceń. Bardziej powszechne są metody eksperymentalne oparte na obserwacji systemu.
Nowoczesne zautomatyzowane procesy są realizowane jako wyspecjalizowane moduły pod kontrolą oprogramowania do regulacji współczynników regulatorów.
Przeznaczenie regulatora PID
Regulator PID ma za zadanie utrzymywać określoną wartość - temperaturę, ciśnienie, poziom w zbiorniku, przepływ w rurociągu, stężenie czegoś itp. na wymaganym poziomie poprzez zmianę działania sterującego na elementach wykonawczych, takich jak zawory automatycznej regulacji, wykorzystując do jego ustawienia wartości proporcjonalne, całkujące i różnicujące.
Celem aplikacji jest uzyskanie precyzyjnego sygnału sterującego, który może być wykorzystywany do sterowania dużymi obiektami, a nawet reaktorami elektrowni.
Przykład obwodu regulacji temperatury
Regulatory PID są często stosowane w regulacji temperatury. Przykładem takiego automatycznego procesu może być podgrzewanie wody w zbiorniku.
Zbiornik jest wypełniony cieczą, którą należy podgrzać do wymaganej temperatury i utrzymać na wymaganym poziomie. Wewnątrz zbiornika znajduje się czujnik temperatury - termopara. termopara lub . termometr oporowy i jest bezpośrednio połączony z regulatorem PID.
Do podgrzewania cieczy doprowadzamy parę, jak pokazano na poniższej ilustracji, z automatycznym zaworem regulacyjnym. Sam zawór otrzymuje sygnał ze sterownika. Operator wprowadza do regulatora PID wartość zadaną temperatury, która ma być utrzymywana w zbiorniku.

Jeśli współczynniki regulatora są nieprawidłowe, temperatura wody będzie skakać, a zawór będzie całkowicie otwarty lub całkowicie zamknięty. W takim przypadku należy obliczyć i ponownie wprowadzić współczynniki PID. Jeśli zostanie to wykonane prawidłowo, po krótkim czasie układ wyrówna się i temperatura w zbiorniku będzie utrzymywana na poziomie temperatury zadanej, przy stopniu otwarcia zaworu regulacyjnego w położeniu środkowym.
Powiązane artykuły: