Een sensor is in het algemeen een toestel dat een fysische grootheid omzet in een andere die kan worden verwerkt, doorgegeven of omgezet. De eerste is gewoonlijk een fysische grootheid die niet rechtstreeks kan worden gemeten (temperatuur, snelheid, verplaatsing, enz.), terwijl de tweede een elektrisch of optisch signaal is. Sensoren, waarvan het basiselement de inductiespoel is, nemen een eigen plaats in op het gebied van meetinstrumenten.
Over
Hoe inductieve sensoren zijn ontworpen en hoe zij werken
Inductieve sensoren zijn volgens hun werkingsprincipe actief, d.w.z. dat zij een externe oscillator nodig hebben. Dit genereert een signaal met een bepaalde frequentie en amplitude in de spoel van de spoel.
De stroom die door de spoelen loopt creëert een magnetisch veld. Als een geleidend voorwerp het magnetische veld binnenkomt, veranderen de spoelparameters. Alles wat overblijft is deze verandering te detecteren.
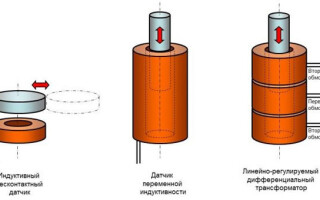
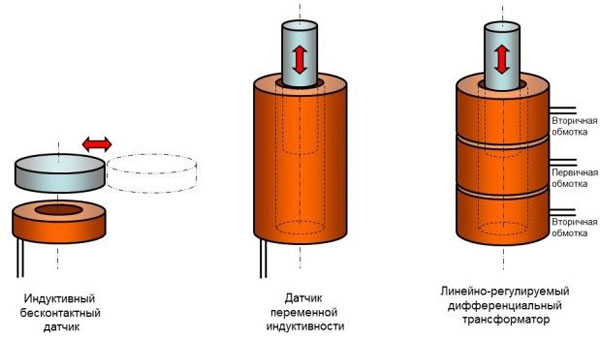
Eenvoudige contactloze sensoren reageren op de aanwezigheid van metalen voorwerpen in het nabije veld van de spoel. Hierdoor verandert de impedantie van de spoel, deze verandering moet worden omgezet in een elektrisch signaal, dat wordt versterkt en/of gedetecteerd door een vergelijkingsschakeling.
Een ander type sensor reageert op veranderingen in de longitudinale positie van een voorwerp dat als spoelkern dient. Als de positie van het voorwerp verandert, schuift het in of uit de spoel, waardoor de inductantie verandert. Deze verandering kan in een elektrisch signaal worden omgezet en gemeten. Een andere versie van deze sensor is die waarbij een voorwerp van buitenaf op de spoel wordt geduwd. Dit veroorzaakt een vermindering van de inductantie als gevolg van het afschermingseffect.
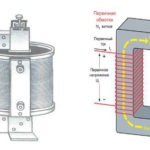
Een andere versie van inductieve verplaatsingssensor is de Lineaire Variabele Differentiële Transformator (LVDT). Het is een samengestelde spoel gemaakt in de volgende volgorde:
- secundaire spoel 1;
- primaire wikkeling;
- secundaire wikkeling 2.
Het signaal van de generator wordt toegepast op de primaire wikkeling. Het magnetisch veld dat door de middelste spoel wordt gecreëerd, induceert een EMF in elk van de secundaire spoelen (het transformatorprincipe).transformatorprincipe). Wanneer de kern beweegt, verandert de onderlinge koppeling tussen de spoelen, waardoor de elektromotorische kracht in elk van de windingen verandert. Deze verandering kan door het meetcircuit worden gedetecteerd. Aangezien de lengte van de kern kleiner is dan de totale lengte van de samengestelde spoel, kan de verhouding van de EMF in de secundaire wikkelingen ondubbelzinnig de positie van het voorwerp bepalen.
Een roterende encoder is gebaseerd op hetzelfde principe van wijziging van de inductieve koppeling tussen de wikkelingen. Het bestaat uit twee coaxiale spoelen. Het signaal wordt toegepast op een van de wikkelingen, de EMF in de tweede wikkeling is afhankelijk van de onderlinge draaihoek.
Uit het werkingsprincipe blijkt duidelijk dat inductieve sensoren, ongeacht hun constructie, contactloze sensoren zijn. Zij werken op afstand en vereisen geen direct contact met het te bewaken voorwerp.
Voor- en nadelen van inductieve sensoren
De voordelen van inductieve sensoren zijn voornamelijk
- Robuuste constructie;
- geen contactverbindingen;
- hoog uitgangsvermogen, wat de invloed van ruis vermindert en het regelcircuit vereenvoudigt;
- hoge gevoeligheid;
- Mogelijkheid van werking met wisselstroomvoeding van industriële frequentie.
De voornaamste nadelen van inductieve sensoren zijn hun grootte, gewicht en complexiteit. Er is speciale apparatuur nodig om de spoelen met de vereiste parameters op te winden. Een ander nadeel is dat de amplitude van het signaal van de masteroscillator nauwkeurig moet worden gehandhaafd. Het gevoeligheidsbereik verandert ook naarmate de signaalamplitude verandert. Aangezien de sensoren alleen op wisselstroom werken, wordt het handhaven van de amplitude een duidelijk technisch probleem. Het is niet mogelijk de sensor rechtstreeks (of via een step-down transformator) aan te sluiten op een huishoudelijk of industrieel elektriciteitsnet, waar spanningsvariaties in amplitude of frequentie tot 10% kunnen bedragen, zelfs bij normaal bedrijf, waardoor de meetnauwkeurigheid onaanvaardbaar wordt.
De meetnauwkeurigheid kan ook worden beïnvloed door:
- Externe magnetische velden (afscherming van de sensor is op grond van zijn werkingsprincipe niet mogelijk);
- zij-EMF inducties in de voedings- en meetkabels
- fabricage onnauwkeurigheden;
- Fouten in de sensorkarakteristiek;
- Speling of vervorming op de montageplaats van de taster die geen invloed heeft op de algemene prestaties;
- Nauwkeurigheidsafhankelijkheid van temperatuur (de windende draadparameters, met inbegrip van zijn weerstand, veranderen).
Het onvermogen van inductantiesensoren om te reageren op de aanwezigheid van diëlektrische voorwerpen in hun magnetisch veld kan zowel als een voordeel als als een nadeel worden beschouwd. Enerzijds beperkt dit het toepassingsgebied. Anderzijds maakt het hen ongevoelig voor vuil, vet, zand enz. op de gecontroleerde voorwerpen.
Door de beperkingen en mogelijke beperkingen van inductieve sensoren te begrijpen, kunnen de voordelen van inductieve sensoren rationeel worden benut.
Toepassingsgebieden voor inductieve sensoren
Inductieve naderingsschakelaars worden vaak gebruikt als eindschakelaars. Deze toestellen worden voor een groot aantal toepassingen gebruikt:
- in beveiligingssystemen als sensoren voor het ongeoorloofd openen van ramen en deuren;
- in telecontrolesystemen als grenspositiesensoren voor assemblages en mechanismen;
- in het dagelijks leven in indicatie circuits van gesloten positie van deuren, vleugels;
- voor het tellen van voorwerpen (b.v. bewegend op een transportband);
- voor het bepalen van de rotatiesnelheid van tandwielen (elke tand die de sensor passeert, genereert een puls);
- In andere situaties.

Hoekpositie-encoders kunnen worden gebruikt om de rotatiehoek van assen, tandwielen en andere roterende eenheden te bepalen, en ook als absolute encoders. Zij kunnen ook worden gebruikt in werktuigmachines en roboticatoepassingen naast lineaire encoders. Overal waar het nodig is de exacte positie van machineonderdelen te kennen.
Praktische toepassingen voor inductieve sensoren
In de praktijk kunnen inductieve sensorontwerpen op verschillende manieren worden uitgevoerd. Het eenvoudigste ontwerp en gebruik is met een tweedraads enkelvoudige sensor die de aanwezigheid van metalen voorwerpen binnen zijn detectiebereik controleert. Deze toestellen worden vaak gemaakt op basis van een W-vormige kern, maar dit is geen cruciaal punt. Dit ontwerp is gemakkelijker te fabriceren.
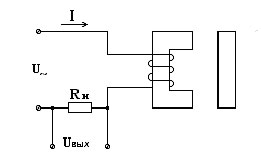
Wanneer de weerstand van de spoel verandert, veranderen de stroom in het circuit en de spanningsval over de belasting. Deze veranderingen kunnen worden opgespoord. Het probleem is dat de belastingsweerstand kritisch wordt. Als deze te groot is, zal de stroomverandering bij het verschijnen van een metalen voorwerp betrekkelijk klein zijn. Dit vermindert de gevoeligheid en immuniteit van het systeem. Als deze klein is, zal de stroom in het circuit hoog zijn en zal een meer veerkrachtige sensor nodig zijn.
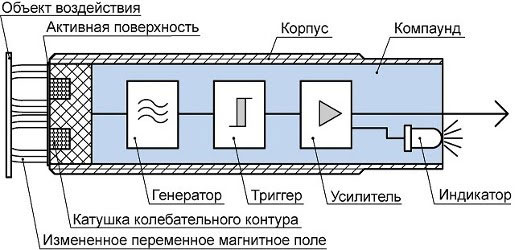
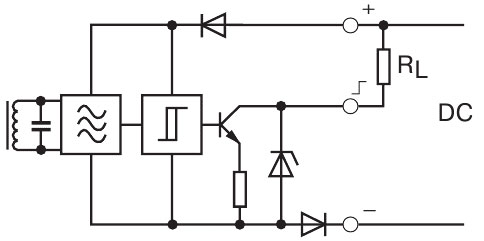
Daarom zijn er ontwerpen waarbij het sensorcircuit in de sensorbehuizing is ingebouwd. Een generator genereert pulsen die de spoel van de spoel voeden. Wanneer een bepaald niveau wordt bereikt, wordt een trigger geactiveerd, die van toestand 0 naar 1 schakelt of omgekeerd. Een bufferversterker versterkt het signaal in termen van vermogen en/of spanning, laat de LED oplichten (doven) en geeft een discreet signaal af voor de externe schakeling.
Het uitgangssignaal kan worden opgewekt:
- door middel van een elektromagnetische of solid-state relais - nul- of gelijkspanningsniveau;
- "droog contact" elektromagnetisch relais;
- open collector transistor (n-p-n of p-n-p structuren).
In dit geval zijn drie draden nodig om de sensor aan te sluiten:
- stroomvoorziening;
- gemeenschappelijke draad (0 volt);
- signaaldraad.
Dergelijke sensoren kunnen ook worden gevoed met gelijkspanning. Hun inductiepulsen worden opgewekt door een interne oscillator.
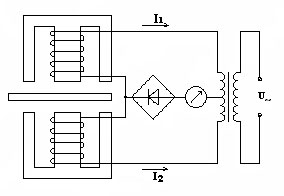
Differentiële sensoren worden gebruikt voor positiebewaking. Indien het te bewaken voorwerp zich symmetrisch ten opzichte van beide spoelen bevindt, is de stroom door beide spoelen gelijk. Indien een van beide spoelen naar het veld is gericht, ontstaat onbalans, de totale stroom is niet meer nul, hetgeen kan worden waargenomen door een indicator met een pijl in het midden van de schaalverdeling. De indicator kan worden gebruikt om zowel de grootte van de afwijking als de richting ervan te bepalen. In plaats van een meetklok kan een regelcircuit worden gebruikt om een signaal te geven wanneer informatie wordt ontvangen over een verandering in de positie, actie te ondernemen om het voorwerp uit te lijnen, procescorrecties uit te voeren, enz.

Sensoren op basis van het principe van lineair geregelde differentiaaltransformatoren worden vervaardigd als complete eenheden, bestaande uit een raamwerk met primaire en secundaire wikkelingen en een staaf die binnenin beweegt (deze kan veerbelast zijn). De draden voor het generatorsignaal en de EMF van de secundaire wikkelingen zijn met de buitenkant verbonden. Het te besturen voorwerp kan mechanisch met de stang worden verbonden. Hij kan ook van diëlektrisch materiaal zijn gemaakt - alleen de positie van de stang is van belang voor de meting.
Ondanks bepaalde inherente nadelen sluit de inductieve sensor vele gebieden af die verband houden met de contactloze detectie van voorwerpen in de ruimte. Ondanks de voortdurende ontwikkeling van de technologie zal dit type toestel de markt van de meetapparatuur in de afzienbare toekomst niet verlaten, omdat de werking ervan gebaseerd is op de fundamentele wetten van de fysica.
Verwante artikelen: