19 世紀と 20 世紀の電気分野の科学は急速に発展し、電気非同期モーターの作成につながりました。このようなデバイスの助けを借りて、産業産業の発展は前進し、現在では非同期電動機を使用した動力機械のないプラントや工場は想像できません。
コンテンツ
歴史
非同期モーターの歴史は 1888 年に始まります。 ニコラ・テスラ 電気モーター回路の特許を取得し、同じ年に別の電気科学者が ガリレオ・フェラーリス 非同期マシンの理論的側面に関する記事を公開しました。
1889年、ロシアの物理学者 ミハイル・オシポビッチ・ドリヴォ=ドブロヴォルスキー ドイツで非同期三相電動機の特許を取得。

これらすべての発明により、電気機械の改善が可能になり、産業での電気機械の大量使用が可能になり、生産におけるすべての技術プロセスが大幅に加速され、作業効率が向上し、労働強度が低下しました。
現在、業界で最も一般的に使用されている電気モーターは、Dolivo-Dobrovolsky によって作成された電気機械のプロトタイプです。
非同期モーターの構造と動作原理
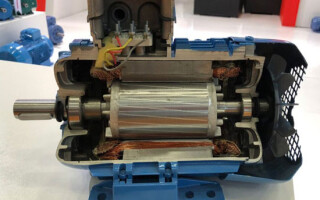
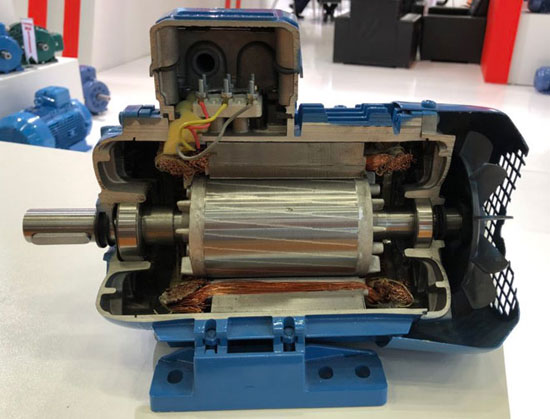
非同期電気モーターの主要コンポーネントは、エアギャップによって互いに分離されている固定子と回転子です。モーターのアクティブな仕事は、巻線とローターコアによって実行されます。
非同期モーターとは、ローター速度と電磁界速度の差を意味します。
ステーター - コアが電気鋼でできており、ベッドに取り付けられているモーターの固定部分です。フレームは非磁性材料から鋳造されています (鋳鉄、アルミニウム)。固定子巻線は、ワイヤが 120 度の偏向角度でスロットに配置された 3 相システムです。巻線フェーズは、標準としてスターまたはデルタ回路でネットワークに接続されます。

ローター - モーターの可動部分です。非同期電気モーターの回転子には、かご形回転子と位相回転子の 2 種類があります。これらのタイプは、回転子巻線の設計によって互いに異なります。
かご形回転子付き誘導電動機
このタイプの電気機械は、M.O. によって最初に特許が取得されました。 Dolivo-Dobrovolskyと一般的に呼ばれています 「リスホイール」 デザインの外観のため。短絡された回転子巻線は、短絡された銅棒 (アルミニウム、真ちゅう) 回転子コア巻線のスロットに挿入します。このタイプのローターには可動接点がないため、このようなモーターは非常に信頼性が高く、耐久性があります。
相回転子を備えた非同期モーター
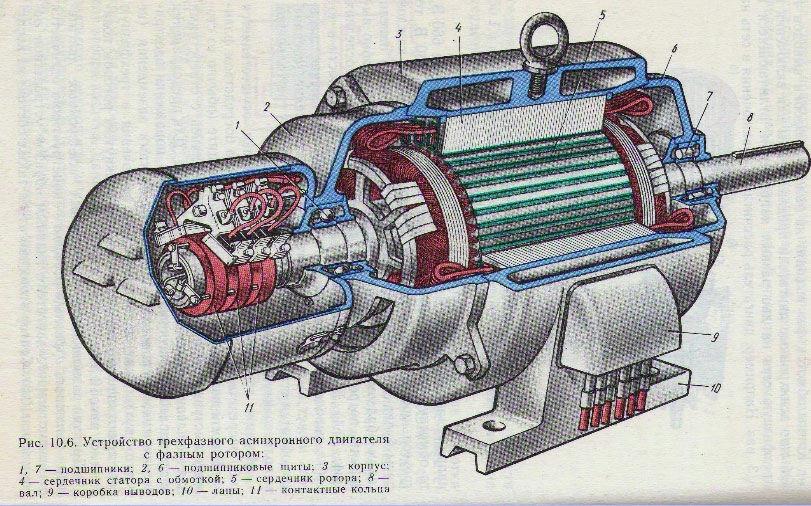
このようなデバイスを使用すると、幅広い範囲で動作速度を調整できます。相回転子は三相巻線で、スターまたはデルタ回路で接続されています。このようなモーターには、ローターの速度を調整するために使用できる特別なブラシが設計されています。このようなモーターのメカニズムに特別なレオスタットを追加すると、モーターの起動時にアクティブ抵抗が減少するため、電気ネットワークとデバイス自体に悪影響を与える始動電流が減少します。
動作原理
固定子巻線に電流が流れると、磁束が発生します。位相が互いに 120 度ずれているため、巻線の磁束が回転します。ローターが短絡すると、この回転によってローターに電流が発生し、電磁場が発生します。ローターとステーターの磁場が相互に作用して、電気モーターのローターを回転させます。相相回転子の場合、固定子と回転子に同時に電圧が印加され、それぞれの機構に磁場が現れ、それらが相互作用して回転子を回転させます。
非同期モーターの利点
| 短絡ローター | 部分相ローター |
|---|---|
| 1.簡単な起動装置と回路 | 1. 低始動電流 |
| 2. 製造価格が安い | 2.回転速度を調整する能力 |
| 3. 負荷が増えても軸速度が変わらない | 3. 速度を変えずに小さな過負荷で運転 |
| 4. 短時間の過負荷に耐える | 4.自動開始を適用できます |
| 5.操作の信頼性と耐久性 | 5. トルクが大きい |
| 6.あらゆる労働条件に適しています | |
| 7. 効率が高い |
非同期モーターの欠点
| リスケージローター付き | 位相巻きローター |
|---|---|
| 1. 回転速度が調整できない | 大きいサイズ 1. |
| 2. 低始動トルク 2. | 2.効率が低い |
| 3.高始動電流 | ブラシの摩耗による頻繁なメンテナンス |
| 4. 設計の複雑さと接点の移動 |
誘導電動機は、優れた機械的特性を備えた非常に効率的なデバイスであり、使用頻度のリーダーとなっています。
動作モード

非同期型電気モーターは普遍的なメカニズムであり、持続時間に関していくつかの動作モードがあります。
- 連続;
- 短時間;
- 間欠;定期的;
- 繰り返し-短時間;
- 特別な。
連続モード - 非同期デバイスの主な動作モードであり、一定の負荷でシャットダウンすることなく電気モーターを連続動作させることを特徴としています。この動作モードは最も一般的で、あらゆる産業企業で使用されています。
短時間稼働 - 指定された時間、安定した負荷に達するまで動作します (10分から90分)、加熱するのに十分な時間がありません。この後、オフになります。このモードは、作用物質を供給するときに使用されます (水、油、ガス) およびその他の状況。
定期運用 - 操作の期間には定義された値があり、作業のサイクルが完了するとオフになります。操作モードは、開始-操作-停止。この場合、外部温度まで冷却する前に一定時間スイッチをオフにしてから、再度オンにすることができます。
間欠運転 - モーターは最大まで加熱されませんが、周囲温度まで冷却する時間もありません。エレベーターやエスカレーターなどに使われています。
スペシャルモード - 活性化の期間と期間は任意です。
電気工学では、電気機械の可逆性の原則があります。これは、デバイスが電気エネルギーを機械エネルギーに変換し、逆の動作を実行できることを意味します。
非同期電気モーターもこの原則に準拠しており、モーターと発電機の動作モードがあります。
モーター操作 - 非同期電気モーターの基本的な動作モードです。巻線に電圧が印加されると、電磁トルクが生成され、ローターがシャフトに引き込まれ、シャフトが回転し始め、モーターが一定の速度になり、有用な作業を実行します。
ジェネレーターモード - ローターが回転するときのモーター巻線の電流の励起の原理に基づいています。モーターのローターを機械的に回転させると、ステーター巻線に起電力が発生し、巻線にコンデンサーが存在すると容量性電流が流れます。コンデンサの容量が一定の値になると、モーターの特性によって発電機が自励し、三相電圧が発生します。したがって、リスケージモーターは発電機のように機能します。
非同期モーターの速度制御
非同期電気モーターの回転速度を調整し、その動作モードを制御するには、次の方法があります。
- 周波数 - 電気ネットワーク内の電流の周波数を変更すると、電気モーターの回転周波数が変化します。この方法では、周波数変換器と呼ばれる装置が使用されます。
- レオスタット - ローター内のレオスタットの抵抗を変更すると、回転数が変化します。この方法は、始動トルクと臨界スリップを増加させます。
- インパルス - モーターに特殊な電圧を加える制御方法。
- 電気モーターの動作中に巻線を「スター」回路から「デルタ」回路に切り替え、始動電流を減らします。
- 短絡した回転子の極対の変更による制御;
- 位相回転子モーターの誘導抵抗の接続。
電子システムの発展に伴い、さまざまな非同期電気モーターの制御がますます効率的かつ正確になっています。このようなモーターは世界中で使用されており、そのようなメカニズムによって実行されるさまざまなタスクが日々増加しており、それらの必要性は減少していません。
関連記事: