La modulazione è un processo elettrico non lineare in cui i parametri di un segnale (portante) sono alterati da un altro segnale (modulante, informazione). Nell'ingegneria delle comunicazioni, la modulazione di frequenza, ampiezza e fase sono ampiamente utilizzate. Nell'elettronica di potenza e nella tecnologia dei microprocessori, la modulazione di larghezza d'impulso sta diventando sempre più comune.
Contenuto
Cos'è il PWM (Pulse Width Modulation)?
Nella modulazione di larghezza d'impulso, l'ampiezza, la frequenza e la fase del segnale originale rimangono invariate. La durata (larghezza) dell'impulso quadrato è influenzata dal segnale informativo. Nella letteratura tecnica inglese è indicato con l'abbreviazione PWM - pulse-width modulation.
Principio di funzionamento del PWM
Il segnale modulato a larghezza di impulso si forma in due modi:
- analogico;
- digitale.
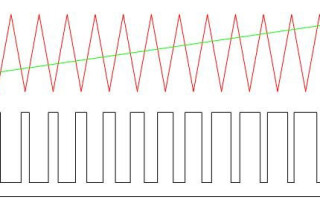
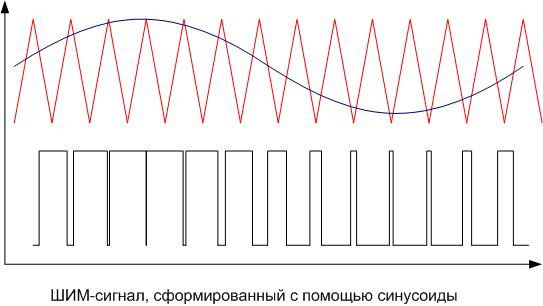
Nel metodo di generazione PWM analogico, un segnale portante sotto forma di una forma d'onda a dente di sega o triangolare viene alimentato all'invertitore ingresso del comparatoree il segnale di informazione viene applicato all'ingresso non invertente del comparatore. Se il livello istantaneo della portante è superiore al segnale modulante, l'uscita del comparatore è zero, se inferiore è uno. L'uscita è un segnale discreto con una frequenza corrispondente alla frequenza del triangolo portante o del dente di sega, e una lunghezza dell'impulso proporzionale al livello di tensione modulante.
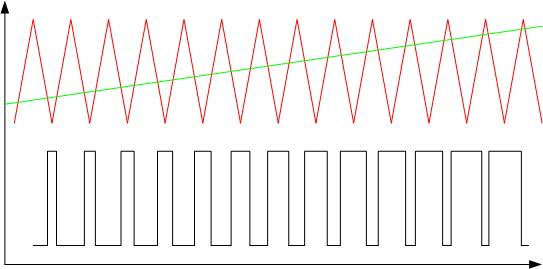
Come esempio, viene mostrata la modulazione di larghezza d'impulso di un segnale triangolare con un impulso lineare crescente. La durata degli impulsi di uscita è proporzionale al livello del segnale di uscita.
I controllori PWM analogici sono anche disponibili come circuiti integrati off-the-shelf che contengono un comparatore e un circuito di generazione della portante. Ci sono ingressi per il collegamento di elementi esterni di encoder di frequenza e il segnale di informazione. L'uscita è usata per pilotare potenti interruttori esterni. Ci sono anche ingressi di feedback per mantenere i parametri di controllo impostati. Questo è il caso, per esempio, del chip TL494. Per applicazioni con una potenza di consumo relativamente bassa, sono disponibili controllori PWM con interruttori interni. L'interruttore interno dell'LM2596 è progettato per correnti fino a 3 ampere.
Il metodo digitale si ottiene utilizzando chip specializzati o microprocessori. La lunghezza dell'impulso è controllata da un programma interno. Molti microcontrollori, compresi i popolari PIC e AVR, hanno un modulo a bordo per l'implementazione hardware del PWM. Per ottenere il segnale PWM è necessario attivare il modulo e impostare i suoi parametri operativi. Se non c'è un tale modulo, il PWM può essere organizzato puramente con metodo software, non è difficile. Questo metodo dà più possibilità e fornisce più libertà grazie all'uso flessibile delle uscite, ma coinvolge più risorse del controllore.
Caratteristiche del segnale PWM
Le caratteristiche importanti del segnale PWM sono:
- ampiezza (U);
- frequenza (f);
- Ciclo di lavoro (S) o fattore di riempimento D.
L'ampiezza in volt è impostata in base al carico. Deve garantire la tensione nominale di alimentazione al consumatore.
La frequenza del segnale modulato a larghezza di impulso viene scelta in base alle seguenti considerazioni:
- Più alta è la frequenza, più alta è la precisione di regolazione.
- La frequenza non deve essere inferiore al tempo di risposta del dispositivo controllato con PWM, altrimenti ci sarà una notevole ondulazione nel parametro controllato.
- Più alta è la frequenza, più alte sono le perdite di commutazione. Ciò è dovuto al fatto che il tempo di commutazione della chiave è finito. Nello stato di latched, l'intera tensione di alimentazione cade attraverso l'elemento chiave, ma non c'è quasi nessuna corrente. Nello stato aperto, la corrente di pieno carico scorre attraverso il tasto, ma la caduta di tensione è piccola perché la resistenza di passaggio è di pochi ohm. In entrambi i casi, la dissipazione di potenza è trascurabile. Il passaggio da uno stato all'altro è rapido, ma non istantaneo. Durante il processo di apertura-chiusura, un'alta tensione cade sull'elemento parzialmente aperto e allo stesso tempo una notevole corrente scorre attraverso l'elemento. Durante questo periodo la dissipazione di potenza raggiunge valori elevati. Questo periodo è breve e la chiave non ha il tempo di riscaldarsi considerevolmente. Ma quando la frequenza aumenta, ci sono più intervalli di tempo di questo tipo per unità di tempo e la perdita di calore aumenta. Perciò è importante usare elementi ad azione rapida nella costruzione delle chiavi.
- Quando si controlla un motori la frequenza deve essere condotta fuori dalla gamma di frequenze leggibili dall'uomo - 25kHz e oltre. Questo perché una frequenza di commutazione più bassa provoca uno sgradevole rumore di fischio.
Questi requisiti sono spesso in contrasto tra loro, quindi la scelta della frequenza è in alcuni casi un compromesso.
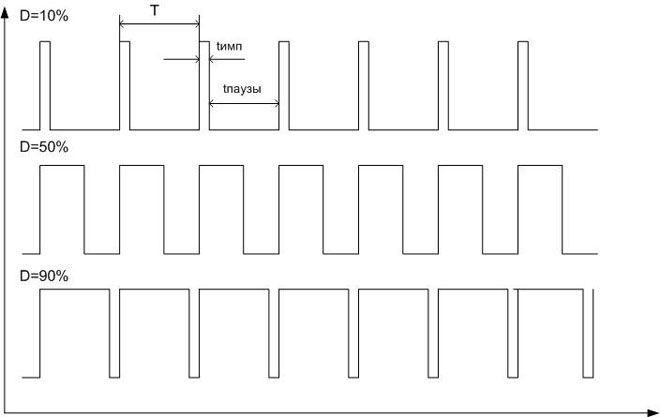
Il valore di modulazione è caratterizzato dal duty cycle. Poiché la frequenza di ripetizione degli impulsi è costante, anche la durata del periodo è costante (T=1/f). Un periodo consiste in un impulso e una pausa, che hanno una durata di timp e tpausa, dove timp+tpausa=Т. Il rapporto è il rapporto tra la durata dell'impulso e il periodo - S=timp/T. Ma in pratica si è rivelato più conveniente usare il valore inverso - fattore di riempimento: D=1/S=T/timp.. È ancora più conveniente esprimere il fattore di riempimento in percentuale.
Qual è la differenza tra PWM e PWM
Non c'è distinzione tra modulazione di larghezza d'impulso e controllo di larghezza d'impulso (PWM) nella letteratura tecnica straniera. Gli esperti russi stanno cercando di distinguere questi concetti. In effetti, il PWM è un tipo di modulazione, cioè il cambiamento del segnale portante sotto l'influenza di un altro segnale modulante. Il segnale portante agisce come portatore di informazioni e il segnale modulante imposta queste informazioni. E il controllo della larghezza d'impulso è la regolazione della modalità di carico per mezzo di PWM.
Ragioni e applicazioni per il PWM
Il principio della modulazione di larghezza d'impulso è usato in Controllo della velocità per motori a induzione ad alta potenza. In questo caso, un segnale modulante a frequenza variabile (monofase o trifase) viene generato utilizzando un generatore di onde sinusoidali a bassa potenza e sovrapposto alla portante in modo analogico. L'uscita è un segnale PWM che viene alimentato ai tasti di richiesta di potenza. La sequenza di impulsi risultante può quindi essere passata attraverso un filtro passa-basso, ad esempio una semplice catena RC, e l'onda sinusoidale originale può essere estratta. Oppure potete farne a meno - il filtraggio avverrà naturalmente a causa dell'inerzia del motore. Ovviamente, più alta è la frequenza portante, più la forma d'onda in uscita è vicina alla sinusoide originale.
Sorge una domanda naturale: perché il segnale dell'oscillatore non può essere amplificato in una volta sola, per esempio, utilizzando transistor ad alta potenza? Perché l'elemento regolatore, operando in modo lineare, ridistribuirà la potenza tra il carico e l'interruttore. Questo causerà uno spreco di energia sull'elemento chiave. Se invece un elemento di regolazione ad alta potenza funziona in modalità chiave (trinistor, triac, transistor RGBT), la potenza viene distribuita nel tempo. Le perdite saranno molto più basse e l'efficienza sarà molto più alta.
Nella tecnologia digitale, non c'è un'alternativa particolare al controllo dell'ampiezza degli impulsi. L'ampiezza del segnale è costante lì, la tensione e la corrente possono essere cambiate solo modulando la larghezza dell'impulso portante e successivamente facendo la media. Pertanto, il PWM viene utilizzato per il controllo della tensione e della corrente in applicazioni che possono calcolare la media del segnale a impulsi. La media è realizzata in vari modi:
- Attraverso l'inerzia del carico. Per esempio, l'inerzia termica dei riscaldatori termoelettrici e delle lampade a incandescenza fa sì che gli oggetti di controllo non si raffreddino sensibilmente tra gli impulsi.
- A causa dell'inerzia della percezione. Un LED si accende di impulso in impulso, ma l'occhio umano non lo nota e lo percepisce come un bagliore costante con intensità variabili. Questo principio è utilizzato per controllare la luminosità dei punti LED. Ma alcune centinaia di hertz di lampeggiamento impercettibile sono ancora presenti e causano l'affaticamento degli occhi.
- A causa dell'inerzia meccanica. Questa proprietà è utilizzata nel controllo dei motori a collettore DC. Con la giusta frequenza di controllo, il motore non ha il tempo di bloccarsi nelle pause di tempo morto.
Perciò, il PWM è usato dove il valore medio della tensione o della corrente gioca un ruolo decisivo. Oltre ai casi comuni menzionati sopra, il metodo PWM regola la corrente media nelle saldatrici e nei caricabatterie, ecc.
Se la media naturale non è possibile, in molti casi questo ruolo può essere assunto dal già citato filtro passa-basso (LPF) sotto forma di una catena RC. Per scopi pratici questo è sufficiente, ma bisogna capire che è impossibile separare il segnale originale dal PWM con un LPF senza distorsione. Dopo tutto, lo spettro PWM contiene un numero infinitamente grande di armoniche, che inevitabilmente cadranno nella larghezza di banda del filtro. Quindi non fatevi illusioni sulla forma della sinusoide ricostruita.
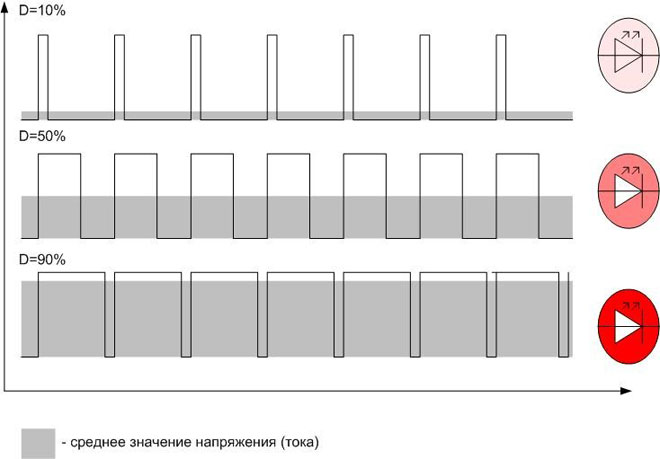
Il controllo PWM di un LED RGB è molto efficace ed efficiente. Questo dispositivo ha tre giunzioni p-n - rosso, blu e verde. Variando la luminosità di ogni canale separatamente, è possibile ottenere quasi tutti i colori dei LED (tranne il bianco puro). Le possibilità di creare effetti di luce con PWM sono infinite.
L'applicazione più comune per un segnale digitale modulato PWM è quella di controllare la corrente o la tensione media che scorre attraverso un carico. Ma è anche possibile utilizzare questo tipo di modulazione in modi non convenzionali. Tutto dipende dall'immaginazione del designer.
Articoli correlati: