A differenciális arányos-integrál szabályozó olyan eszköz, amelyet automatizált rendszerekben telepítenek egy adott, változtatható paraméter fenntartására.
Első ránézésre zavaró, de a PID-szabályozás elmagyarázható bábuknak is, pl. olyan emberek, akik nem igazán ismerik az elektronikus rendszereket és készülékeket.
Tartalomjegyzék
Mi az a PID szabályozó?
A PID-szabályozó a szabályozási áramkörbe integrált eszköz, kötelező visszacsatolással. Úgy tervezték, hogy a beállított szinteket, pl. a levegő hőmérsékletét fenntartsa.
A készülék az érzékelőktől vagy távadóktól kapott adatok alapján vezérlőjelet vagy kimeneti jelet ad a vezérlőnek. A vezérlők magas tranziens pontossággal és minőségi teljesítménnyel rendelkeznek.
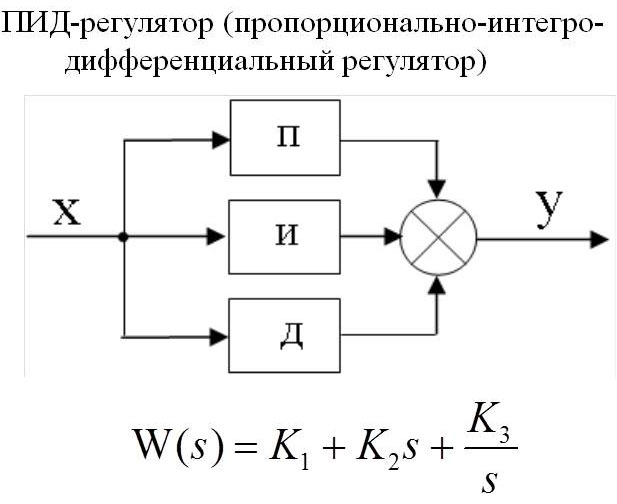
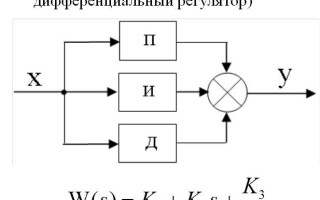
A PID szabályozó három együtthatója és működési elve
A PID-szabályozó feladata, hogy a szabályozott paraméter előre meghatározott szinten tartásához szükséges teljesítmény kimeneti jelét adja. Az érték kiszámításához egy összetett matematikai képletet használnak, amely 3 együtthatót tartalmaz - arányos, integrál, differenciál.
Vegyünk egy vizet tartalmazó tartályt, mint szabályozási tárgyat, amelyben a hőmérsékletet egy adott szinten kell tartani egy gőzszelep nyitási fokának szabályozásával.
Az arányos komponens a bemeneti adatokkal való eltérés pillanatában jelenik meg. Egyszerűbben fogalmazva ez így hangzik: a tényleges hőmérséklet és a kívánt hőmérséklet közötti különbséget meg kell venni, megszorozni egy állítható együtthatóval, és megkapjuk a szelephez alkalmazandó kimeneti jelet. Más szóval, amint a hőmérséklet leesik, a fűtési folyamat elindul; amint a kívánt hőmérséklet fölé emelkedik, kikapcsol, vagy akár le is hűl.
Ezután következik az integrál komponens, amelynek célja, hogy kompenzálja a környezet vagy más zavaró hatások hatását a hőmérsékletünk beállítási ponton tartására. Mivel mindig vannak további tényezők, amelyek befolyásolják a vezérelt készülékeket, a szám már akkor változik, amikor az arányos komponens kiszámításához szükséges adatok megérkeznek. És minél nagyobbak a külső hatások, annál nagyobbak az alak ingadozásai. Teljesítményszállítási ugrások fordulnak elő.
Az integrál komponens megpróbálja visszaadni a hőmérséklet értékét a múltbeli értékek alapján, ha az megváltozott. A folyamatot részletesebben az alábbi videón mutatjuk be.
Ezután a szabályozó kimeneti jelét az együtthatónak megfelelően táplálják a hőmérséklet emelésére vagy csökkentésére. Idővel kiválasztódik egy olyan érték, amely kompenzálja a külső tényezőket, és a túlfeszültségek eltűnnek.
Az integrál a hibák kiküszöbölésére szolgál a statikus hiba kiszámításával. A legfontosabb ebben a folyamatban a helyes együttható kiválasztása, különben a hiba (eltérés) az integrál összetevőre is kihat.
A harmadik PID-összetevő a differenciálösszetevő. Úgy tervezték, hogy kompenzálja a rendszerre gyakorolt hatás és a visszajelzés között fellépő késleltetések hatásait. Az arányos szabályozó addig szolgáltat áramot, amíg a hőmérséklet el nem éri a megfelelő értéket, de az információ átadása során mindig vannak hibák, különösen a magas értékeknél. Ez túlmelegedéshez vezethet. A differenciálmű előre jelzi a késések vagy környezeti hatások okozta eltéréseket, és előre csökkenti a szolgáltatott teljesítményt.
PID szabályozó beállítása
A PID-szabályozót 2 módszerrel hangoljuk:
- A szintézis során a paramétereket a rendszermodell alapján számítják ki. Az ilyen hangolás pontos, de alapos ismereteket igényel az automatikus vezérlés elméletében. Ezt csak mérnökök és tudósok tehetik meg. Mivel áramlási jellemzőket kell venni és sok számítást kell végezni.
- A kézi módszer próbálgatáson és hibázáson alapul. Ez úgy történik, hogy egy már meglévő rendszer adatait vesszük, és egy vagy több szabályozó együtthatót módosítunk. A bekapcsolás és a végeredmény megfigyelése után a paraméterek a kívánt irányba módosulnak. És így tovább, amíg a kívánt teljesítményszintet el nem érjük.
Az elméleti elemzési és hangolási módszereket a gyakorlatban ritkán alkalmazzák, mivel nem ismerik a szabályozási tárgy jellemzőit és a lehetséges zavaró hatások sokaságát. A rendszer megfigyelésén alapuló kísérleti módszerek elterjedtebbek.
A modern automatizált folyamatokat speciális modulokként valósítják meg a szabályozói együtthatók beállítására szolgáló szoftverek irányítása alatt.
A PID szabályozó célja
A PID-szabályozót úgy tervezték, hogy egy bizonyos értéket - hőmérséklet, nyomás, tartályszint, csővezetékben történő áramlás, valaminek a koncentrációja stb. - egy kívánt szinten tartson a működtető eszközökön, például az automatikus szabályozószelepeken végzett szabályozási művelet megváltoztatásával, arányos, integráló, differenciáló értékek felhasználásával a beállításhoz.
Az alkalmazás célja, hogy olyan pontos vezérlőjelet kapjunk, amely alkalmas nagy üzemek, sőt erőművi reaktorok vezérlésére is.
Példa egy hőmérséklet-szabályozó áramkörre
A PID-szabályozókat gyakran használják a hőmérséklet-szabályozásban, vegyük egy egyszerű példát a víz melegítésére egy tartályban, mint ennek az automatikus folyamatnak a példáját.
A tartályt folyadékkal töltik fel, amelyet a kívánt hőmérsékletre kell melegíteni, és a kívánt szinten kell tartani. A tartályban van egy hőmérséklet-érzékelő - egy termoelem. termoelem vagy ellenállás-hőmérő és közvetlenül a PID-szabályozóhoz van csatlakoztatva.
A folyadék felmelegítéséhez gőzt szolgáltatunk, ahogy az alábbi ábrán látható, az automatikus szabályozószeleppel. Maga a szelep jelet kap a vezérlőtől. A kezelő beírja a tartályban tartandó hőmérséklet-beállítási értéket a PID-szabályozóba.

Ha a szabályozó együtthatói helytelenek, a vízhőmérséklet ugrik, és a szelep teljesen nyitott és teljesen zárt lesz. Ebben az esetben a PID együtthatókat ki kell számítani és újra be kell írni. Ha helyesen jár el, rövid idő elteltével a rendszer kiegyenlítődik, és a tartály hőmérséklete a beállított hőmérsékleten marad, a szabályozószelep középső állásban lévő nyitási fokával.
Kapcsolódó cikkek: