Az érzékelő általánosságban olyan eszköz, amely egy fizikai mennyiséget egy másik, feldolgozható, továbbítható vagy átalakítható mennyiséggé alakít át. Az első általában egy közvetlenül nem mérhető fizikai mennyiség (hőmérséklet, sebesség, elmozdulás stb.), míg a második egy elektromos vagy optikai jel. Az érzékelők, amelyek alapeleme az induktív tekercs, sajátos helyet foglalnak el a mérőműszerek területén.
A oldalról
Az induktív érzékelők kialakítása és működése
Az induktív érzékelők működési elvüknél fogva aktívak, azaz külső oszcillátorra van szükségük. Ez egy meghatározott frekvenciájú és amplitúdójú jelet generál az induktortekercsben.
A tekercseken átfolyó áram mágneses mezőt hoz létre. Ha egy vezető tárgy belép a mágneses mezőbe, a tekercs paraméterei megváltoznak. Már csak ezt a változást kell észlelni.
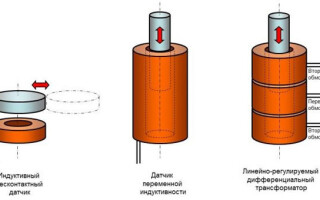
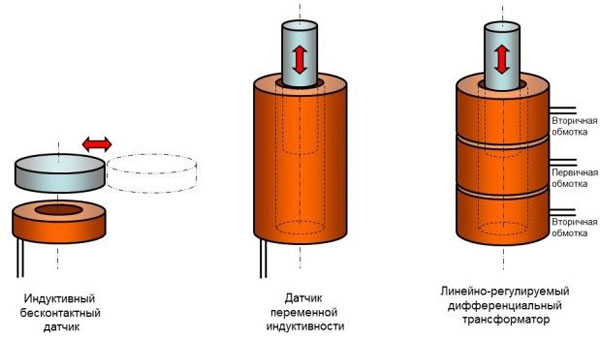
Az egyszerű érintésmentes érzékelők a tekercs közeli mezejében lévő fémtárgyak jelenlétére reagálnak. Ez megváltoztatja a tekercs impedanciáját, ezt a változást elektromos jellé kell alakítani, erősíteni és/vagy egy összehasonlító áramkörrel érzékelni.
Egy másik típusú érzékelő a tekercsmagként szolgáló tárgy hosszirányú helyzetének változására reagál. Ahogy a tárgy helyzete változik, a tárgy a tekercsbe csúszik befelé vagy kifelé, ezáltal változik az induktivitása. Ez a változás elektromos jellé alakítható és mérhető. Ennek az érzékelőnek egy másik változata az, amikor egy tárgyat kívülről a tekercsre nyomnak. Ez az árnyékoló hatás miatt az induktivitás csökkenését okozza.
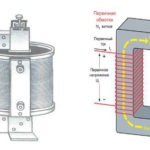
Az induktív elmozdulásérzékelő egy másik változata a lineáris változó differenciál transzformátor (LVDT). Ez egy összetett tekercs, amely a következő sorrendben készül:
- szekunder tekercs 1;
- primer tekercselés;
- szekunder tekercselés 2.
A generátorból érkező jelet a primer tekercsre kell vezetni. A középső tekercs által létrehozott mágneses mező EMF-et indukál a szekunder tekercsekben (transzformátor elve).transzformátor elve). A mag mozgása során megváltozik a tekercsek közötti kölcsönös csatolás, és ezáltal az elektromotoros erő az egyes tekercsekben. Ezt a változást a mérőáramkör érzékeli. Mivel a mag hossza kisebb, mint az összetett tekercs teljes hossza, a szekunder tekercsek EMF-jének aránya egyértelműen meghatározhatja a tárgy helyzetét.
A forgókódoló ugyanezen az elven alapul, a tekercsek közötti induktív csatolás megváltoztatásán. Két koaxiális tekercsből áll. A jel az egyik tekercsre kerül, az EMK a második tekercsben a kölcsönös forgási szögtől függ.
A működési elvből nyilvánvaló, hogy az induktív érzékelők - kialakításuktól függetlenül - érintésmentes érzékelők. Távolról működnek, és nem igényelnek közvetlen kapcsolatot a megfigyelendő tárggyal.
Az induktív érzékelők előnyei és hátrányai
Az induktív érzékelők előnyei elsősorban a következők
- Robusztus felépítés;
- nincsenek érintkezési kapcsolatok;
- nagy kimeneti teljesítmény, ami csökkenti a zaj hatását és egyszerűsíti a vezérlőáramkört;
- nagy érzékenység;
- Lehetőség van ipari frekvenciájú váltakozó áramú tápegységgel való működésre.
Az induktív érzékelők fő hátránya a méretük, súlyuk és bonyolultságuk. A tekercsek megfelelő paraméterekkel történő tekercseléséhez speciális berendezésekre van szükség. További hátránya, hogy a főoszcillátorból érkező jel amplitúdóját pontosan fenn kell tartani. Az érzékenységi tartomány is változik a jel amplitúdójának változásával. Mivel az érzékelők csak váltakozó árammal működnek, az amplitúdó fenntartása határozott technikai problémává válik. Az érzékelőt nem lehet közvetlenül (vagy lefokozó transzformátoron keresztül) háztartási vagy ipari hálózatra csatlakoztatni, ahol a feszültség amplitúdó- vagy frekvenciaingadozásai még normál üzemben is elérhetik a 10%-ot, ami a mérési pontosságot elfogadhatatlanná teszi.
A mérési pontosságot befolyásolhatják a következők is:
- Külső mágneses mezők (az érzékelő árnyékolása a működési elve alapján nem lehetséges);
- EMF indukciók a táp- és mérőkábelekben
- gyártási pontatlanságok;
- Hibák az érzékelő jellemzőiben;
- Hátulütések vagy deformációk a szonda rögzítési helyén, amelyek nem befolyásolják az általános teljesítményt;
- A pontosság függ a hőmérséklettől (a tekercselőhuzal paraméterei, beleértve az ellenállását is, változnak).
Az, hogy az induktivitásérzékelők nem képesek reagálni a mágneses térben lévő dielektromos tárgyak jelenlétére, egyszerre tekinthető előnynek és hátránynak. Ez egyrészt korlátozza az alkalmazási területet. Másrészt érzéketlenné teszi őket a megfigyelt tárgyakon lévő szennyeződésekre, zsiradékra, homokra stb.
Az induktív érzékelők korlátainak és lehetséges korlátainak megértésével az induktív érzékelők előnyei racionálisan kihasználhatók.
Az induktív érzékelők alkalmazási területei
Az induktív közelítéskapcsolókat gyakran használják végálláskapcsolóként. Ezeket az eszközöket sokféle alkalmazásban használják:
- biztonsági rendszerekben az ablakok és ajtók illetéktelen kinyitását érzékelő érzékelőként;
- a távvezérlő rendszerekben, mint a szerelvények és mechanizmusok végállásérzékelői;
- a mindennapi életben az ajtók, nyílászárók zárt helyzetét jelző áramkörökben;
- tárgyak számlálására (pl. szállítószalagon mozgó tárgyak);
- a fogaskerekek fordulatszámának meghatározására (minden egyes, az érzékelőn áthaladó fog impulzust generál);
- Más helyzetekben.

A szöghelyzet-jeladók tengelyek, fogaskerekek és más forgó egységek forgási szögének meghatározására, valamint abszolút jeladóként is használhatók. A lineáris kódolók mellett szerszámgépekben és robotikai alkalmazásokban is használhatók. Ahol a gépalkatrészek pontos helyzetének ismerete szükséges.
Az induktív érzékelők gyakorlati alkalmazásai
A gyakorlatban az induktív érzékelőket többféleképpen lehet megvalósítani. A legegyszerűbb kialakítás és használat egy kétvezetékes, egyetlen érzékelővel történik, amely az érzékelési tartományában lévő fémtárgyak jelenlétét figyeli. Ezek az eszközök gyakran W alakú mag alapján készülnek, de ez nem döntő szempont. Ez a kialakítás könnyebben gyártható.
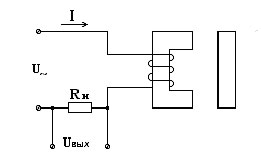
Amikor a tekercs ellenállása megváltozik, az áramkörben az áram és a terhelésen mért feszültségesés változik. Ezek a változások kimutathatók. A probléma az, hogy a terhelés ellenállása kritikussá válik. Ha túl nagy, akkor az áramváltozás egy fémtárgy megjelenésekor viszonylag kicsi lesz. Ez csökkenti a rendszer érzékenységét és immunitását. Ha kicsi, akkor az áramkörben az áram nagy lesz, és rugalmasabb érzékelőre lesz szükség.
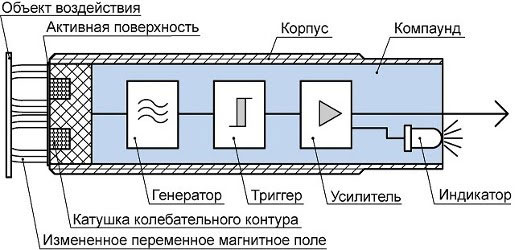
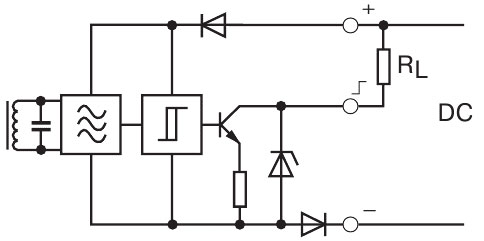
Ezért vannak olyan konstrukciók, ahol az érzékelő áramkör az érzékelőházba van beépítve. Egy generátor impulzusokat generál, amelyek az induktortekercset táplálják. Egy bizonyos szint elérésekor egy trigger működésbe lép, és a 0-ról 1 állapotra vált, vagy fordítva. Egy puffererősítő erősíti a jelet teljesítmény és/vagy feszültség szempontjából, világít (kialszik) a LED, és egy diszkrét jelet ad ki a külső áramkör számára.
A kimeneti jel generálható:
- elektromágneses vagy szilárdtest relé - nulla vagy egységnyi feszültségszint;
- "szárazon érintkező" elektromágneses relé;
- nyitott kollektor tranzisztor (n-p-n vagy p-n-p szerkezetek).
Ebben az esetben három vezetékre van szükség az érzékelő csatlakoztatásához:
- tápegység;
- közös vezeték (0 volt);
- jelzővezeték.
Az ilyen érzékelők egyenfeszültségről is táplálhatók. Induktivitásuk impulzusait egy belső oszcillátor generálja.
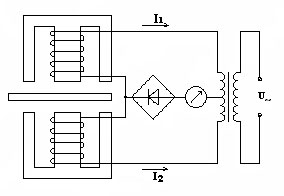
A differenciális érzékelőket a pozíció ellenőrzésére használják. Ha a megfigyelendő tárgy mindkét tekercshez képest szimmetrikusan helyezkedik el, akkor a két tekercsen átfolyó áram azonos. Ha valamelyik tekercs a mező felé van előfeszítve, kiegyensúlyozatlanság lép fel, a teljes áram már nem nulla, amit a skála közepén lévő nyíllal ellátott kijelzővel lehet érzékelni. A mutató segítségével meghatározható az eltolás nagysága és iránya is. Egy vezérlőáramkör használható a mérőműszer helyett, hogy jelzést adjon, amikor információt kap a pozíció változásáról, és intézkedjen a tárgy beállítására, a folyamat korrekciójára stb.

A lineárisan szabályozott differenciál transzformátorok elvén alapuló érzékelőket teljes szerkezetként gyártják, amelyek egy primer és szekunder tekercseléssel ellátott keretből és egy belsejében mozgó rúdból állnak (ez lehet rugós is). A generátor jelének és a szekunder tekercsek EMF-jének vezetékei kívülre vannak csatlakoztatva. A vezérlendő tárgy mechanikusan csatlakoztatható a szárhoz. Dielektromos anyagból is készülhet - a mérés szempontjából csak a szár helyzete fontos.
Bizonyos hátrányai ellenére az induktív érzékelő számos területet lezár a térben lévő tárgyak érintésmentes érzékelésével kapcsolatban. A technológia folyamatos fejlődése ellenére az ilyen típusú eszközök belátható időn belül nem fognak eltűnni a mérőeszközök piacáról, mivel működésük a fizika alapvető törvényein alapul.
Kapcsolódó cikkek: