A háromfázisú elektromos áram rendszerét a XIX. század végén fejlesztette ki M.O.Dolivo-Dobrovolszkij orosz tudós. A három fázis, amelyek feszültségei 120 fokkal eltolva vannak egymáshoz képest, egyéb előnyök mellett megkönnyíti a forgó mágneses mező létrehozását. Ez a mező a leggyakoribb és legegyszerűbb háromfázisú aszinkronmotorok forgórészeit mozgatja.
E motorok három állórész-tekercselése általában csillag vagy háromszög kapcsolásban van. A külföldi szakirodalomban a "csillag" és a "delta" kifejezéseket, rövidítve S és D, használják. A leggyakoribb emlékeztető megnevezés a D és Y, ami néha félreértéshez vezethet - a D betű ugyanis a "csillag" és a "delta" jelölésére is használható.
Tartalom
Fázis- és hálózati feszültségek
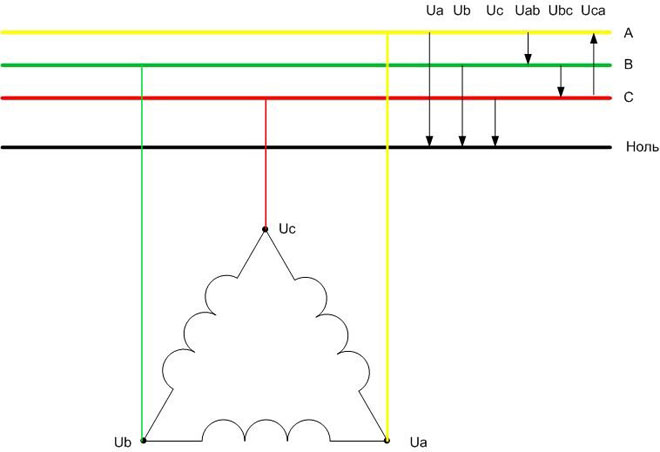
A tekercselési kapcsolatok közötti különbségek megértéséhez először is meg kell érteni, hogy a fázisfeszültségek és a hálózati feszültségek fogalmát. A fázisfeszültség az egyik fázis eleje és vége közötti feszültség. A lineáris feszültség a különböző fázisok azonos kapcsai közötti feszültség.
Háromfázisú hálózat esetén a hálózati feszültségek a fázisok, pl. A és B közötti feszültségek, a fázisfeszültségek pedig az egyes fázisok és a nullavezető közötti feszültségek.
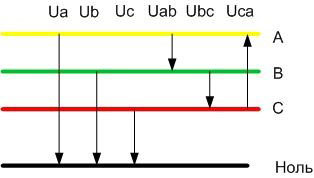
Így az Ua, Ub, Uc feszültségek fázisfeszültségek, az Uab, Ubc, Uca pedig hálózati feszültségek lesznek. A különbség e feszültségek között egyszoros. Így egy 0,4 kV-os háztartási és ipari hálózat esetében a hálózati feszültségek 380 voltosak, a fázisfeszültségek pedig 220 voltosak.
A motor tekercselésének csatlakoztatása csillagkapcsolásban
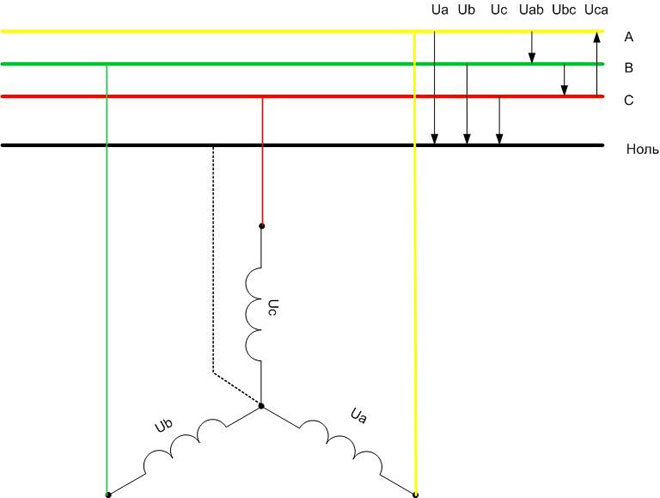
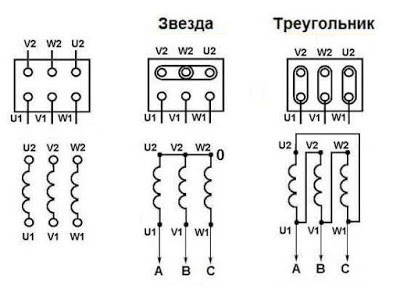
A csillagkapcsolásban a három tekercset egy közös ponton csatlakoztatják a csillagvégekkel. A szabad végek mindegyike más-más fázishoz van csatlakoztatva. Egyes esetekben a közös pont a villamosenergia-rendszer semleges gyűjtősínjéhez csatlakozik.
Az ábrán látható, hogy ennél a csatlakozásnál a hálózati fázisfeszültséget kell alkalmazni minden tekercsre (0,4 kV-os hálózatok esetén - 220 volt).
Elektromotor tekercselésének csatlakoztatása delta csatlakozásban
A delta áramkörben a tekercsvégek sorba vannak kötve. Egyfajta kör alakul ki, de a szakirodalomban a gyakran használt elrendezés miatt a "delta" elnevezést használják. A semleges vezetéket ebben a változatban nem kell sehova sem csatlakoztatni.
Nyilvánvaló, hogy az egyes tekercsekre alkalmazott feszültségek lineárisak lesznek (380 volt tekercsenként).
A kapcsolási rajzok összehasonlítása egymással
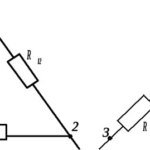
A két áramkör egymással való összehasonlításához ki kell számítani a villanymotor által az egyik vagy a másik csatlakozásnál kifejtett elektromos teljesítményt. Ehhez tekintsük a hálózati áram (Ilin) és a fázisáram (Iphase) fogalmát. A fázisáram a fázistekercselésen átfolyó áram. A lineáris áram a tekercselés csatlakozójához csatlakoztatott vezetőn keresztül folyik.
Az 1000 voltig terjedő hálózatokban a villamos energia forrása a következő transzformátorEgy olyan transzformátor szekundere, amelynek tekercselése csillagkapcsolásban van (különben nem lehetne semleges vezetőt biztosítani), vagy egy olyan generátoré, amelynek tekercselései ugyanígy vannak összekötve.
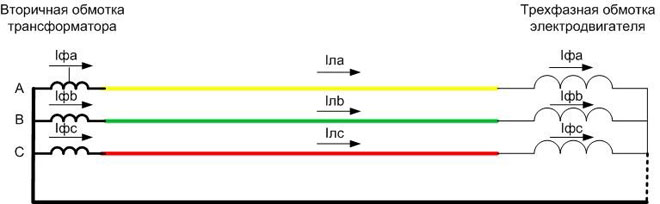
Az ábrán látható, hogy csillagkapcsolásban a vezetőáram és a motortekercselés áramai megegyeznek. Egy fázisban az áramot a fázisfeszültség határozza meg:
![\[I_faz=\frac{U_faz}{Z}\]](https://electros.tomathouse.com/wp-content/ql-cache/quicklatex.com-f4518d61a0fe68758ecd5221efdc8d3a_l3.png "A QuickLaTeX.com által renderelve")
ahol Z az egyik fázis tekercselési ellenállása, ezek egyenlőnek tekinthetők. Le lehet írni, hogy
![{\[I_faz=I_lin\]]](https://electros.tomathouse.com/wp-content/ql-cache/quicklatex.com-be70a1b78bb7c7fd8a17275f34f188ee_l3.png "A QuickLaTeX.com által renderelve")
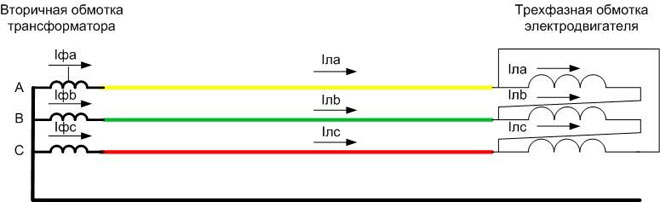
Deltakapcsolás esetén az áramok eltérőek - azokat a Z ellenálláson alkalmazott hálózati feszültségek határozzák meg:
![\[I_faz=\frac{U_lin}{Z}\]](https://electros.tomathouse.com/wp-content/ql-cache/quicklatex.com-04741f4af117efbb0661c26c4ee10334_l3.png "A QuickLaTeX.com által renderelve")
Ezért ebben az esetben  .
.
Most összehasonlíthatjuk a teljes teljesítményt ( ), amelyet a különböző áramkörök motorjai fogyasztanak.
), amelyet a különböző áramkörök motorjai fogyasztanak.
- csillagkapcsolat esetén a látszólagos teljesítmény
 ;
; - delta kapcsolás esetén a látszólagos teljesítmény
 .
.
Így a motor csillagkapcsolás esetén háromszor kisebb teljesítményt fejleszt, mint a háromszögkapcsolás esetén. Ennek egyéb pozitív hatásai is vannak:
- a bemeneti áramok csökkennek;
- a motor egyenletesebben fut és indul;
- a motor képes megbirkózni a rövid idejű túlterheléssel;
- az aszinkronmotor termikus viselkedése kíméletesebbé válik.
Az érem másik oldala az, hogy a csillag tekercselésű motor nem tudja kifejteni maximális teljesítményét. Egyes esetekben a nyomaték még a forgórész megpörgetéséhez sem elegendő.
A csillag-delta áramkörök kapcsolási módjai
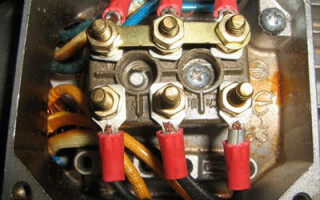
A legtöbb motort úgy tervezték, hogy az egyik csatlakozásról a másikra való átkapcsolás elvégezhető legyen. A tekercsek eleje és vége a csatlakozótömbön található, így a csillagot a tekercselőpárnák helyzetének megváltoztatásával egyszerűen delta-csatlakoztatható.
A villanymotor tulajdonosa választhat, hogy lágy indítást szeretne-e alacsony indítási árammal és egyenletes működéssel, vagy a motor által kifejlesztett legnagyobb teljesítményt. Ha mindkettőre szükség van, akkor nagy teljesítményű kontaktorokkal automatikusan lehet kapcsolni.
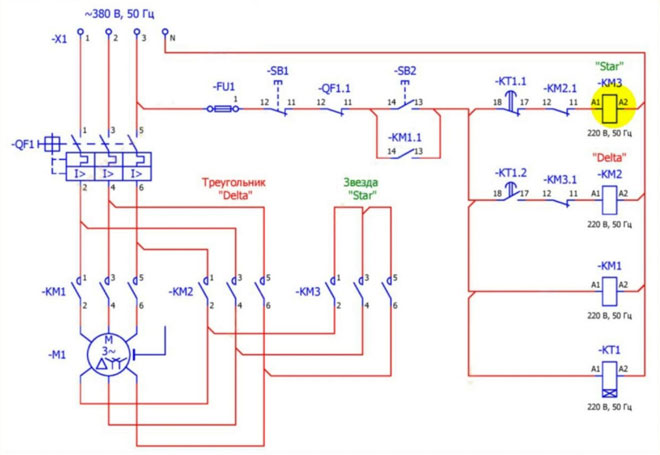
Az SB2 indítógomb megnyomásakor a motor csillag alakban kapcsol be. A KM3 kontaktor feszültség alatt van, érintkezői az egyik oldalon reteszelik a motor tekercselésének vezetékeit. Az ellentétes vezetékek a KM1 érintkezőin keresztül csatlakoznak a hálózathoz, mindegyik egy másik fázishoz. Amikor ez a kontaktor feszültség alá kerül, háromfázisú feszültség kerül a tekercsekre, és a motor forgórészét meghajtja. A KT1 relén beállított bizonyos idő elteltével a KM3 tekercs átkapcsol, feszültségmentessé válik, a KM2 kontaktor feszültség alá kerül, a tekercseket deltába kapcsolja.
A váltás azután történik, hogy a motor felveszi a fordulatszámot. Ez a pillanat a sebességérzékelőn keresztül is ellenőrizhető, de a gyakorlatban ez egyszerűbb. Az átkapcsolást a következők vezérlik időváltó - 5-7 másodperc elteltével feltételezhető, hogy az indítási folyamat befejeződött, és a motor maximális teljesítményre kapcsolható. A csillagterhelést meghaladó tartós működés károsíthatja a meghajtót.
A művelet végrehajtása során a következőket kell szem előtt tartani:
- A csillagkapcsolású motor indítási nyomatéka lényegesen kisebb, mint a háromszögkapcsolású motoré, ezért a nehéz indítási körülmények között lévő motor nem mindig indítható el ilyen módon. Egyszerűen nem indul el. Ilyen esetek például az ellennyomással működő, elektromos meghajtású szivattyúk stb. Az ilyen problémák megoldhatók egy fázisrotoros motor alkalmazásával, a gerjesztési áram indításkor történő fokozatmentes növelésével. A sikeres csillagindítást zárt kapun futó centrifugálszivattyúknál, a motortengelyen lévő ventilátorterhelésnél stb. alkalmazzák.
- A villanymotor tekercseléseinek ellen kell állniuk a hálózati feszültségnek. Fontos, hogy a D/Y 220/380 voltos motorokat (jellemzően kis teljesítményű indukciós motorok 4 kW-ig) ne keverjük össze a D/Y 380/660 voltos motorokkal (jellemzően 4 kW és nagyobb teljesítményűek). A 660 voltos hálózatot szinte soha nem használják, de csak az ilyen névleges feszültségű villanymotorok használhatók csillag-delta kapcsoláshoz. A 220/380-as háromfázisú hajtás csak csillagkapcsolásban kapcsolható. Ezeket nem szabad a kapcsolóáramkörben használni.
- Az átfedések elkerülése érdekében szünetet kell tartani a csillagkontaktor kikapcsolása és a delta kontaktor bekapcsolása között. De nem szabad túlságosan megnövelni, hogy megakadályozzuk a motor leállását. Ha az áramkört saját maga készíti el, előfordulhat, hogy kísérleti úton kell beállítani.
Fordított kapcsolást is alkalmaznak. Ennek akkor van értelme, ha egy erős motor átmenetileg kis terheléssel működik. A teljesítménytényező alacsony, mivel az aktív energiafogyasztást a motor üzemidőciklusa határozza meg. A meddő teljesítményt elsősorban a tekercsek induktivitása határozza meg, amely független a tengely terhelésétől. Az aktív és a reaktív energiafogyasztás arányának javítása érdekében a tekercsek csillag elrendezésűre kapcsolhatók. Ez történhet manuálisan vagy automatikusan is.
A kapcsolási áramkör diszkrét elemekből - időzített relékből, kontaktorokból (indítókból) stb. - állítható össze. Léteznek olyan kész megoldások is, amelyek az automatikus kapcsolóáramkört egyetlen házba integrálják. Mindössze annyit kell tennie, hogy a motort és a háromfázisú tápellátást a kimeneti csatlakozókhoz csatlakoztatja. Az ilyen eszközöknek különböző nevei lehetnek, pl. "indítási idő relé" stb.
A motortekercsek különböző sémák szerinti csatlakoztatásának vannak előnyei és hátrányai. Az előnyök és hátrányok ismerete a helyes működés alapja. Ezután a motor hosszú ideig tart, és maximális hatást biztosít.
Kapcsolódó cikkek: