मॉड्यूलेशन एक गैर-रैखिक विद्युत प्रक्रिया है जिसमें एक सिग्नल (वाहक) के पैरामीटर दूसरे सिग्नल (मॉड्यूलेटिंग, सूचना) द्वारा बदल दिए जाते हैं। संचार इंजीनियरिंग में आवृत्ति, आयाम और चरण मॉड्यूलेशन का व्यापक रूप से उपयोग किया जाता है। बिजली इलेक्ट्रॉनिक्स और माइक्रोप्रोसेसर प्रौद्योगिकी में पल्स-चौड़ाई मॉडुलन व्यापक है।
अंतर्वस्तु
पीडब्लूएम (पल्स-चौड़ाई मॉडुलन) क्या है
पल्स-चौड़ाई मॉडुलन में मूल सिग्नल का आयाम, आवृत्ति और चरण अपरिवर्तित रहता है। सूचना संकेत के प्रभाव में आयताकार नाड़ी की अवधि (चौड़ाई) में परिवर्तन हो सकता है। अंग्रेजी तकनीकी साहित्य में इसे संक्षिप्त नाम PWM - पल्स-चौड़ाई मॉडुलन द्वारा दर्शाया गया है।
पीडब्लूएम का कार्य सिद्धांत
एक पल्स-चौड़ाई-मॉड्यूलेटेड सिग्नल दो तरह से बनता है:
- अनुरूप;
- डिजिटल।
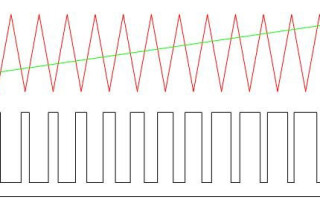
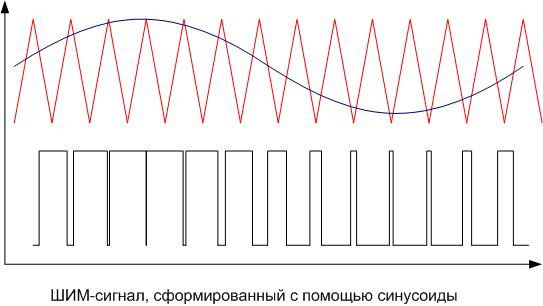
एनालॉग पीडब्लूएम सिग्नल जनरेशन मेथड इनवर्टिंग पर एक आरी या त्रिकोणीय वाहक सिग्नल का उपयोग करता है तुलनित्र का इनपुटऔर सूचना संकेत तुलनित्र के गैर-इनवर्टिंग इनपुट को भेजा जाता है। यदि वाहक का तात्कालिक स्तर मॉड्यूलेटिंग सिग्नल से अधिक है, तो तुलनित्र आउटपुट शून्य है, यदि कम है - एक।आउटपुट एक असतत संकेत है जिसकी आवृत्ति वाहक त्रिभुज या चूरा की आवृत्ति के अनुरूप होती है, और एक पल्स लंबाई मॉड्यूलेटिंग वोल्टेज स्तर के आनुपातिक होती है।
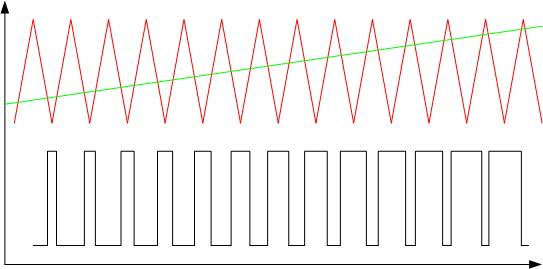
एक उदाहरण के रूप में, एक रैखिक-बढ़ते सिग्नल द्वारा त्रिकोणीय सिग्नल की पल्स चौड़ाई मॉड्यूलेशन दिखाया गया है। आउटपुट दालों की अवधि आउटपुट सिग्नल के स्तर के समानुपाती होती है।
एनालॉग पीडब्लूएम नियंत्रक ऑफ-द-शेल्फ एकीकृत सर्किट के रूप में भी उपलब्ध हैं जिनमें एक तुलनित्र और वाहक पीढ़ी सर्किटरी शामिल है। बाहरी आवृत्ति एनकोडर तत्वों को जोड़ने और एक सूचना संकेत की आपूर्ति के लिए इनपुट हैं। आउटपुट से एक सिग्नल लिया जाता है जो शक्तिशाली बाहरी स्विच को नियंत्रित करता है। फीडबैक के लिए इनपुट भी हैं - सेट विनियमन मानकों को बनाए रखने के लिए उनकी आवश्यकता होती है। यह, उदाहरण के लिए, TL494 चिप है। उन मामलों के लिए जहां उपभोक्ता शक्ति अपेक्षाकृत कम है, अंतर्निहित कुंजियों के साथ PWM नियंत्रक उपलब्ध हैं। 3 amps तक की धाराओं के लिए LM2596 चिप का आंतरिक स्विच डिज़ाइन किया गया है।
डिजिटल पद्धति विशेष चिप्स या माइक्रोप्रोसेसरों का उपयोग करके की जाती है। नाड़ी की लंबाई एक आंतरिक कार्यक्रम द्वारा नियंत्रित होती है। लोकप्रिय PIC और AVR सहित कई माइक्रोकंट्रोलर में हार्डवेयर PWM कार्यान्वयन के लिए एक मॉड्यूल ऑनबोर्ड है। पीडब्लूएम सिग्नल प्राप्त करने के लिए मॉड्यूल को सक्रिय करना और इसके ऑपरेटिंग पैरामीटर सेट करना आवश्यक है। यदि ऐसा कोई मॉड्यूल नहीं है, तो आप पीडब्लूएम को विशुद्ध रूप से सॉफ्टवेयर विधि द्वारा व्यवस्थित कर सकते हैं, यह मुश्किल नहीं है। यह विधि अधिक संभावनाएं देती है और आउटपुट के लचीले उपयोग के कारण अधिक स्वतंत्रता देती है, लेकिन इसमें नियंत्रक के अधिक संसाधन शामिल होते हैं।
पीडब्लूएम सिग्नल विशेषताओं
PWM सिग्नल की महत्वपूर्ण विशेषताएं हैं:
- आयाम (यू);
- आवृत्ति (एफ);
- कर्तव्य चक्र (एस) या भरण कारक डी।
वोल्ट में आयाम लोड के आधार पर निर्धारित किया जाता है। यह उपभोक्ता की नाममात्र आपूर्ति वोल्टेज प्रदान करना चाहिए।
पल्स-चौड़ाई मॉड्यूलेटेड सिग्नल की आवृत्ति निम्नलिखित विचारों से चुनी जाती है:
- आवृत्ति जितनी अधिक होगी, विनियमन सटीकता उतनी ही अधिक होगी।
- आवृत्ति डिवाइस के प्रतिक्रिया समय से कम नहीं होनी चाहिए, जिसे पीडब्लूएम द्वारा नियंत्रित किया जाता है, अन्यथा विनियमित पैरामीटर के ध्यान देने योग्य स्पंदन होंगे।
- आवृत्ति जितनी अधिक होगी, स्विचिंग हानि उतनी ही अधिक होगी। यह इस तथ्य के कारण है कि कुंजी का स्विचिंग समय सीमित है। बंद अवस्था में, संपूर्ण आपूर्ति वोल्टेज प्रमुख तत्व पर पड़ता है, लेकिन लगभग कोई करंट नहीं होता है। खुली अवस्था में, पूर्ण भार धारा कुंजी के माध्यम से प्रवाहित होती है, लेकिन वोल्टेज ड्रॉप छोटा होता है क्योंकि पास-थ्रू प्रतिरोध कुछ ओम होता है। दोनों ही मामलों में, बिजली अपव्यय नगण्य है। एक राज्य से दूसरे राज्य में संक्रमण तेजी से होता है, लेकिन तात्कालिक नहीं। ओपन-क्लोज़ प्रक्रिया के दौरान आंशिक रूप से खुले तत्व पर एक बड़ा वोल्टेज गिरता है और साथ ही साथ एक महत्वपूर्ण धारा प्रवाहित होती है। इस समय बिजली अपव्यय उच्च मूल्यों तक पहुँच जाता है। यह अवधि कम है, कुंजी के पास काफी गर्म होने का समय नहीं है। लेकिन जैसे-जैसे आवृत्ति बढ़ती है, प्रति इकाई समय में ऐसे और अधिक समय अंतराल होते हैं और गर्मी का नुकसान बढ़ता है। इसलिए, चाबियों के निर्माण के लिए तेजी से काम करने वाले तत्वों का उपयोग करना महत्वपूर्ण है।
- नियंत्रित करते समय एक मोटर का आवृत्ति को मनुष्य के लिए श्रव्य सीमा से परे - 25 kHz और उससे अधिक का नेतृत्व करना होगा। क्योंकि कम पीडब्लूएम आवृत्तियों पर, अप्रिय सीटी बजती है।
ये आवश्यकताएं अक्सर एक-दूसरे के विरोध में होती हैं, इसलिए कुछ मामलों में आवृत्ति का चुनाव एक समझौते की खोज है।
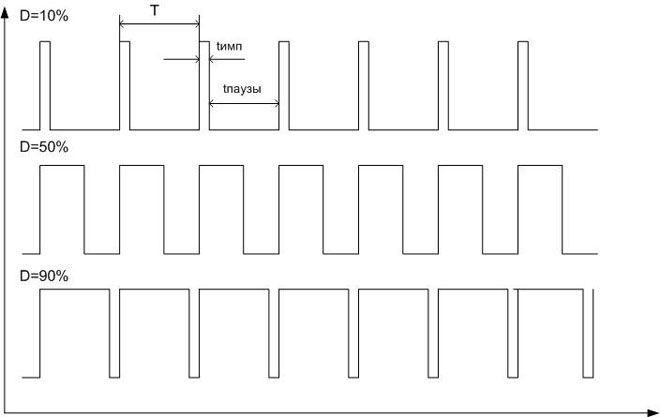
मॉड्यूलेशन का परिमाण कर्तव्य चक्र की विशेषता है। चूंकि नाड़ी पुनरावृत्ति दर स्थिर है, इसलिए अवधि अवधि भी स्थिर है (T=1/f)। एक अवधि में एक नाड़ी और एक विराम होता है, जिसकी अवधि क्रमशः t . होती हैछोटा सा भूत और टीरोकना, जहां टीछोटा सा भूत+टीरोकना=Т. अनुपात नाड़ी की अवधि और अवधि का अनुपात है - S=tछोटा सा भूत/टी।लेकिन व्यवहार में यह उलटा मूल्य का उपयोग करने के लिए और अधिक सुविधाजनक निकला - भरण कारक: डी = 1/एस = टी/टीछोटा सा भूत. भरण कारक को प्रतिशत के रूप में व्यक्त करना और भी सुविधाजनक है।
पीडब्लूएम और पीडब्लूएम में क्या अंतर है
विदेशी तकनीकी साहित्य में, पल्स-चौड़ाई मॉडुलन और पल्स-चौड़ाई नियंत्रण (पीडब्लूएम) के बीच कोई अंतर नहीं है। रूसी विशेषज्ञ इन अवधारणाओं के बीच अंतर करने की कोशिश कर रहे हैं। वास्तव में, पीडब्लूएम एक प्रकार का मॉड्यूलेशन है, अर्थात, दूसरे की कार्रवाई के तहत वाहक सिग्नल में बदलाव, मॉड्यूलेटिंग सिग्नल। वाहक सिग्नल सूचना के वाहक के रूप में कार्य करता है, और मॉड्यूलेटिंग सिग्नल इस जानकारी को सेट करता है। और पल्स चौड़ाई नियंत्रण पीडब्लूएम के माध्यम से लोड मोड का विनियमन है।
पीडब्लूएम के कारण और अनुप्रयोग
पल्स-चौड़ाई मॉडुलन के सिद्धांत का प्रयोग किया जाता है शक्तिशाली प्रेरण मोटर्स के लिए गति नियंत्रक. इस मामले में, समायोज्य आवृत्ति (एकल-चरण या तीन-चरण) का एक मॉड्यूलिंग सिग्नल कम-शक्ति साइन वेव जनरेटर द्वारा बनाया जाता है और एक एनालॉग तरीके से वाहक पर लगाया जाता है। आउटपुट एक PWM सिग्नल है, जिसे पॉवर डिमांड कीज़ को फीड किया जाता है। फिर आप एक साधारण आरसी-श्रृंखला जैसे कम-पास फिल्टर के माध्यम से दालों के परिणामी अनुक्रम को पारित कर सकते हैं, और मूल साइनसॉइड को अलग कर सकते हैं। या आप इसके बिना कर सकते हैं - मोटर की जड़ता के कारण फ़िल्टरिंग स्वाभाविक रूप से होगी। जाहिर है, वाहक आवृत्ति जितनी अधिक होगी, आउटपुट सिग्नल का आकार उतना ही मूल साइनसॉइड के करीब होगा।
एक स्वाभाविक प्रश्न उठता है - आप थरथरानवाला संकेत को एक बार में क्यों नहीं बढ़ा सकते, उदाहरण के लिए, उच्च शक्ति ट्रांजिस्टर का उपयोग करना? क्योंकि रेगुलेटिंग एलिमेंट, लीनियर मोड में काम कर रहा है, लोड और स्विच के बीच पावर का पुनर्वितरण करेगा। इसका मतलब है कि प्रमुख तत्व पर बहुत अधिक शक्ति बर्बाद होती है। यदि, दूसरी ओर, एक शक्तिशाली नियामक तत्व कुंजी मोड (ट्रिनिस्टर, ट्राइक, आरजीबीटी ट्रांजिस्टर) में काम करता है, तो समय के साथ शक्ति वितरित की जाती है।नुकसान बहुत कम होगा और दक्षता बहुत अधिक होगी।
डिजिटल तकनीक में पल्स चौड़ाई नियंत्रण का कोई विशेष विकल्प नहीं है। सिग्नल का आयाम वहां स्थिर है, और वोल्टेज और करंट को बदलने का एकमात्र तरीका पल्स चौड़ाई वाहक को संशोधित करना और फिर इसे औसत करना है। इसलिए, PWM का उपयोग उन वस्तुओं पर वोल्टेज और करंट को विनियमित करने के लिए किया जाता है जो पल्स सिग्नल को औसत कर सकते हैं। औसत विभिन्न तरीकों से होता है:
- लोड जड़ता द्वारा। इस प्रकार, थर्मोइलेक्ट्रिक हीटर और गरमागरम लैंप की थर्मल जड़ता नियंत्रण वस्तुओं को दालों के बीच के ठहराव में ध्यान से ठंडा नहीं होने देती है।
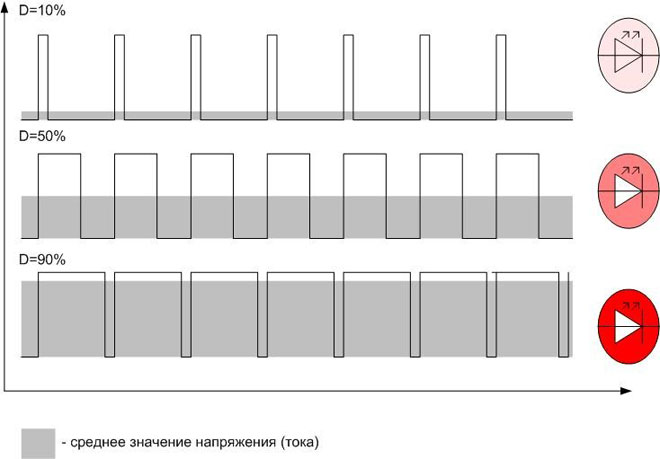
- धारणा की जड़ता के कारण। एलईडी के पास नाड़ी से नाड़ी तक फीका होने का समय है, लेकिन मानव आंख इस पर ध्यान नहीं देती है और इसे अलग-अलग तीव्रता के साथ निरंतर चमक के रूप में मानती है। एलईडी मॉनिटर का चमक नियंत्रण इसी सिद्धांत पर आधारित है। लेकिन कई सौ हर्ट्ज की आवृत्ति के साथ अगोचर निमिष अभी भी मौजूद है और आंखों की थकान का कारण बनता है।
- यांत्रिक जड़ता के कारण। इस संपत्ति का उपयोग डीसी कलेक्टर मोटर्स को नियंत्रित करने के लिए किया जाता है। यदि नियंत्रण आवृत्ति ठीक से चुनी जाती है, तो मोटर के पास डेड टाइम पॉज़ में रुकने का समय नहीं होता है।
इसलिए, पीडब्लूएम का उपयोग किया जाता है जहां वोल्टेज या करंट का औसत मूल्य निर्णायक भूमिका निभाता है। उल्लिखित सामान्य मामलों के अलावा, पीडब्लूएम विधि वेल्डिंग मशीन और बैटरी चार्जर आदि में औसत धारा को नियंत्रित करती है।
यदि प्राकृतिक औसत संभव नहीं है, तो कई मामलों में यह भूमिका पहले से उल्लिखित निम्न-पास फ़िल्टर द्वारा ग्रहण की जा सकती है (एलपीएफ) आरसी-चेन के रूप में। व्यावहारिक उद्देश्यों के लिए यह पर्याप्त है, लेकिन यह समझा जाना चाहिए कि विरूपण के बिना एलपीएफ के साथ पीडब्लूएम से मूल सिग्नल को अलग करना असंभव है। आखिरकार, पीडब्लूएम स्पेक्ट्रम में असीम रूप से बड़ी संख्या में हार्मोनिक्स होते हैं, जो अनिवार्य रूप से फिल्टर बैंडविड्थ में मिल जाएंगे।इसलिए, बहाल किए गए साइनसॉइड के आकार के बारे में कोई भ्रम न रखें।
आरजीबी एलईडी का पीडब्लूएम नियंत्रण बहुत प्रभावी और कुशल है। इस उपकरण में तीन p-n जंक्शन हैं - लाल, नीला, हरा। प्रत्येक चैनल की चमक को अलग-अलग बदलकर, आप लगभग किसी भी रंग की एलईडी चमक (शुद्ध सफेद को छोड़कर) प्राप्त कर सकते हैं। पीडब्लूएम के साथ प्रकाश प्रभाव पैदा करने की संभावनाएं अनंत हैं।
डिजिटल पल्स चौड़ाई मॉड्यूलेटेड सिग्नल का सबसे आम अनुप्रयोग लोड के माध्यम से बहने वाले औसत वर्तमान या वोल्टेज को नियंत्रित करना है। लेकिन इस प्रकार के मॉडुलन का गैर-मानक उपयोग भी संभव है। यह सब डिजाइनर की कल्पना पर निर्भर करता है।
संबंधित आलेख: