XIX और XX सदियों में बिजली के क्षेत्र में विज्ञान, तेजी से विकसित हो रहा है, जिसके कारण विद्युत अतुल्यकालिक मोटर्स का निर्माण हुआ। ऐसे उपकरणों की मदद से, औद्योगिक उद्योग का विकास आगे बढ़ गया है और अब बिजली मशीनों के बिना अतुल्यकालिक इलेक्ट्रिक मोटर्स का उपयोग किए बिना पौधों और कारखानों की कल्पना करना असंभव है।
अंतर्वस्तु
इतिहास
अतुल्यकालिक मोटर का इतिहास 1888 में शुरू होता है जब निकोला टेस्ला एक इलेक्ट्रिक मोटर सर्किट का पेटेंट कराया, उसी वर्ष एक और विद्युत वैज्ञानिक गैलीलियो फेरारिस अतुल्यकालिक मशीन के सैद्धांतिक पहलुओं पर एक लेख प्रकाशित किया।
1889 में, रूसी भौतिक विज्ञानी मिखाइल ओसिपोविच डोलिवो-डोब्रोवोल्स्की जर्मनी में एक अतुल्यकालिक तीन-चरण इलेक्ट्रिक मोटर के लिए पेटेंट प्राप्त किया।

इन सभी आविष्कारों ने इलेक्ट्रिक मशीनों को बेहतर बनाने की अनुमति दी और इसके परिणामस्वरूप उद्योग में इलेक्ट्रिक मशीनों का बड़े पैमाने पर उपयोग हुआ, जिसने उत्पादन में सभी तकनीकी प्रक्रियाओं को तेज कर दिया, काम की दक्षता में सुधार किया और इसकी श्रम तीव्रता को कम कर दिया।
वर्तमान में, उद्योग में उपयोग की जाने वाली सबसे आम इलेक्ट्रिक मोटर डोलिवो-डोब्रोवोल्स्की द्वारा बनाई गई इलेक्ट्रिक मशीन का एक प्रोटोटाइप है।
अतुल्यकालिक मोटर के संचालन की संरचना और सिद्धांत
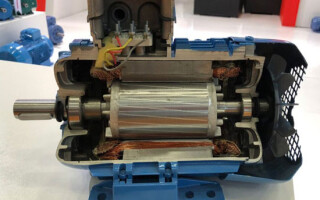
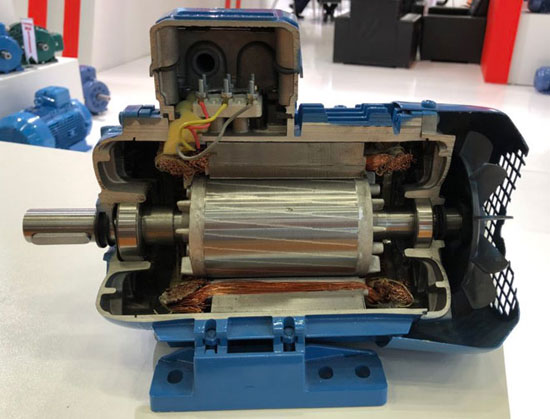
एसिंक्रोनस इलेक्ट्रिक मोटर के मुख्य घटक स्टेटर और रोटर हैं, जो एक दूसरे से हवा के अंतर से अलग होते हैं। मोटर में सक्रिय कार्य वाइंडिंग और रोटर कोर द्वारा किया जाता है।
अतुल्यकालिक मोटर का अर्थ है रोटर की गति और विद्युत चुम्बकीय क्षेत्र की गति के बीच का अंतर।
स्टेटर - मोटर का एक निश्चित हिस्सा होता है जिसका कोर इलेक्ट्रिकल स्टील से बना होता है और बेड में लगा होता है। फ्रेम एक ऐसी सामग्री से डाली गई है जो चुंबकीय नहीं है (कच्चा लोहा, एल्यूमीनियम) स्टेटर वाइंडिंग एक तीन-चरण प्रणाली है जिसमें तारों को स्लॉट में 120 डिग्री के विक्षेपण कोण के साथ रखा जाता है। घुमावदार चरण मानक के रूप में स्टार या डेल्टा सर्किट में नेटवर्क से जुड़े होते हैं।

रोटर - मोटर का गतिमान भाग है। एसिंक्रोनस इलेक्ट्रिक मोटर रोटर दो प्रकार के होते हैं: गिलहरी-पिंजरे और चरण रोटार। रोटर वाइंडिंग के डिजाइन में ये प्रकार एक दूसरे से भिन्न होते हैं।
गिलहरी पिंजरे रोटर के साथ प्रेरण मोटर
इस प्रकार की इलेक्ट्रिक मशीन का सबसे पहले M.O. द्वारा पेटेंट कराया गया था। डोलिवो-डोब्रोवल्स्की और लोकप्रिय रूप से कहा जाता है "गिलहरी का पहिया" डिजाइन की उपस्थिति के कारण। शॉर्ट-सर्किट रोटर वाइंडिंग में कॉपर की शॉर्ट-सर्किटेड रॉड्स होती हैं (एल्यूमीनियम, पीतल) और रोटर कोर वाइंडिंग के स्लॉट्स में डाला गया। इस प्रकार के रोटर में कोई गतिमान संपर्क नहीं होता है, इसलिए ऐसे मोटर्स संचालन में बहुत विश्वसनीय और टिकाऊ होते हैं।
चरण रोटर के साथ अतुल्यकालिक मोटर
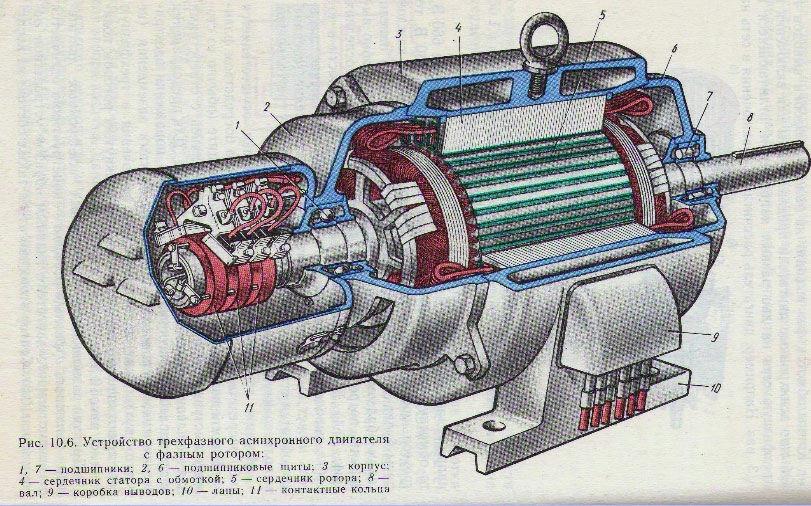
ऐसा उपकरण आपको एक विस्तृत श्रृंखला में संचालन की गति को समायोजित करने की अनुमति देता है। फेज रोटर एक तीन फेज वाइंडिंग है, जो स्टार या डेल्टा सर्किट से जुड़ा होता है। ऐसी मोटरों के डिजाइन में विशेष ब्रश होते हैं, जिनका उपयोग रोटर की गति को नियंत्रित करने के लिए किया जा सकता है। यदि ऐसी मोटर के तंत्र में एक विशेष रिओस्टेट जोड़ा जाता है, तो मोटर की शुरुआत में सक्रिय प्रतिरोध कम हो जाएगा और इस प्रकार प्रारंभिक धाराएं, जो विद्युत नेटवर्क और डिवाइस पर ही हानिकारक प्रभाव डालती हैं, कम हो जाएंगी।
संचालन का सिद्धांत
जब स्टेटर वाइंडिंग पर विद्युत प्रवाह लगाया जाता है, तो चुंबकीय प्रवाह होता है। चूंकि चरण एक दूसरे के संबंध में 120 डिग्री से ऑफसेट होते हैं, इससे वाइंडिंग में फ्लक्स घूमने लगता है। यदि रोटर शॉर्ट-सर्किट है, तो यह घुमाव रोटर में एक करंट पैदा करता है जो एक इलेक्ट्रोमैग्नेटिक फील्ड बनाता है। एक दूसरे के साथ बातचीत करते हुए, रोटर और स्टेटर के चुंबकीय क्षेत्र इलेक्ट्रिक मोटर के रोटर को घुमाने का कारण बनते हैं। चरण-चरण रोटर के मामले में, स्टेटर और रोटर पर एक साथ वोल्टेज लगाया जाता है, प्रत्येक तंत्र में एक चुंबकीय क्षेत्र दिखाई देता है, वे एक दूसरे के साथ बातचीत करते हैं और रोटर को घुमाते हैं।
अतुल्यकालिक मोटर्स के लाभ
| शॉर्ट-सर्किट रोटर | आंशिक चरण रोटर |
|---|---|
| 1. सरल स्टार्ट-अप डिवाइस और सर्किट | 1. कम प्रारंभिक धारा |
| 2. कम विनिर्माण मूल्य | 2. रोटेशन की गति को समायोजित करने की क्षमता |
| 3. बढ़ते भार के साथ शाफ्ट की गति नहीं बदलती है | 3. गति को बदले बिना छोटे अधिभार के साथ संचालन |
| 4. छोटी अवधि के अधिभार का सामना करने में सक्षम | 4. स्वचालित प्रारंभ लागू कर सकते हैं |
| 5. संचालन में विश्वसनीय और टिकाऊ | 5. एक उच्च टोक़ है |
| 6. किसी भी काम करने की स्थिति के लिए उपयुक्त | |
| 7. उच्च दक्षता है |
अतुल्यकालिक मोटर्स के नुकसान
| गिलहरी पिंजरे रोटर के साथ | चरण-घाव रोटर के साथ |
|---|---|
| 1. रोटर की गति को समायोजित नहीं किया जा सकता है | बड़ा आकार 1. |
| 2. कम शुरुआती टोक़ 2. | 2. दक्षता कम है |
| 3.उच्च प्रारंभिक धारा | ब्रश पहनने के कारण बार-बार रखरखाव |
| 4. कुछ डिजाइन जटिलता और चलती संपर्क |
इंडक्शन मोटर्स उत्कृष्ट यांत्रिक विशेषताओं के साथ बहुत कुशल उपकरण हैं, जो उन्हें उपयोग की आवृत्ति में अग्रणी बनाता है।
वर्तमान विधियां

अतुल्यकालिक प्रकार की इलेक्ट्रिक मोटर एक सार्वभौमिक तंत्र है और इसमें अवधि के संदर्भ में कई ऑपरेटिंग मोड हैं:
- निरंतर;
- कम समय;
- रुक-रुक कर; आवधिक;
- बार-बार-अल्प-समय;
- विशेष।
सतत मोड - अतुल्यकालिक उपकरणों के संचालन का मुख्य तरीका है, जो निरंतर लोड के साथ शटडाउन के बिना इलेक्ट्रिक मोटर के निरंतर संचालन की विशेषता है। यह ऑपरेटिंग मोड सबसे आम है, इसका उपयोग हर जगह औद्योगिक उद्यमों में किया जाता है।
शॉर्ट-टाइम ऑपरेशन - एक निर्दिष्ट समय के लिए एक स्थिर भार तक पहुंचने तक काम करता है (10 से 90 मिनट तक), गर्म करने के लिए पर्याप्त समय नहीं होना। इसके बाद इसे बंद कर दिया जाता है। काम करने वाले पदार्थों की आपूर्ति करते समय इस मोड का उपयोग किया जाता है (पानी, तेल, गैस) और अन्य स्थितियां।
आवधिक संचालन - ऑपरेशन की अवधि का एक निर्धारित मूल्य होता है, और काम का एक चक्र पूरा करने के बाद बंद कर दिया जाता है। ऑपरेशन मोड स्टार्ट-ऑपरेट-स्टॉप। इस मामले में, यह बाहरी तापमान पर ठंडा होने से पहले कुछ समय के लिए बंद हो सकता है और फिर से चालू हो सकता है।
आंतरायिक संचालन - मोटर अधिकतम तक गर्म नहीं होती है, लेकिन उसके पास परिवेश के तापमान को ठंडा करने का समय भी नहीं होता है। इसका उपयोग लिफ्ट, एस्केलेटर और अन्य उपकरणों में किया जाता है।
विशेष मोड - सक्रियता की अवधि और अवधि मनमानी।
इलेक्ट्रिकल इंजीनियरिंग में विद्युत मशीनों की उत्क्रमणीयता का एक सिद्धांत है - इसका मतलब है कि उपकरण विद्युत ऊर्जा को यांत्रिक ऊर्जा में परिवर्तित कर सकता है और विपरीत क्रिया कर सकता है।
एसिंक्रोनस इलेक्ट्रिक मोटर्स भी इस सिद्धांत के अनुरूप हैं और इसमें मोटर और जनरेटर के संचालन के तरीके हैं।
मोटर संचालन - एक अतुल्यकालिक इलेक्ट्रिक मोटर के संचालन का मूल तरीका है।जब वाइंडिंग पर वोल्टेज लगाया जाता है, तो विद्युत चुम्बकीय टोक़ उत्पन्न होता है, शाफ्ट के साथ रोटर को घुमाता है और इस प्रकार शाफ्ट घूमना शुरू कर देता है, मोटर उपयोगी कार्य करते हुए स्थिर गति पर जाता है।
जेनरेटर मोड - रोटर के घूमने पर मोटर वाइंडिंग में विद्युत प्रवाह के उत्तेजना के सिद्धांत पर आधारित है। यदि आप मोटर के रोटर को यांत्रिक रूप से घुमाते हैं, तो स्टेटर वाइंडिंग्स में एक इलेक्ट्रोमोटिव बल उत्पन्न होता है, वाइंडिंग में कैपेसिटर की उपस्थिति में एक कैपेसिटिव करंट होता है। यदि संधारित्र क्षमता एक निश्चित मान है, तो मोटर की विशेषताओं के आधार पर, जनरेटर का आत्म-उत्तेजना होगा और वोल्टेज की तीन-चरण प्रणाली होगी। इसलिए गिलहरी केज मोटर जनरेटर की तरह काम करेगी।
अतुल्यकालिक मोटर्स का गति नियंत्रण
अतुल्यकालिक इलेक्ट्रिक मोटर्स की रोटेशन गति को विनियमित करने और उनके संचालन मोड को नियंत्रित करने के निम्नलिखित तरीके हैं:
- फ़्रीक्वेंसी - विद्युत नेटवर्क में करंट की आवृत्ति को बदलने से, इलेक्ट्रिक मोटर के घूमने की आवृत्ति बदल जाती है। इस विधि के लिए, आवृत्ति कनवर्टर नामक एक उपकरण का उपयोग किया जाता है;
- रिओस्टेट - रोटर में रिओस्तात के प्रतिरोध को बदलकर, घूर्णी आवृत्ति में परिवर्तन होता है। यह विधि शुरुआती टॉर्क और क्रिटिकल स्लिप को बढ़ाती है;
- आवेग - नियंत्रण विधि, जिसमें मोटर पर एक विशेष प्रकार का वोल्टेज लगाया जाता है।
- इलेक्ट्रिक मोटर के संचालन के दौरान "स्टार" सर्किट से "डेल्टा" सर्किट में वाइंडिंग को स्विच करना, जो शुरुआती धाराओं को कम करता है;
- शॉर्ट-सर्किट रोटार के लिए पोल जोड़े के परिवर्तन के साथ नियंत्रण;
- फेज-रोटर मोटर्स के लिए इंडक्टिव रेजिस्टर का कनेक्शन।
इलेक्ट्रॉनिक सिस्टम के विकास के साथ, विभिन्न अतुल्यकालिक इलेक्ट्रिक मोटर्स का नियंत्रण अधिक से अधिक कुशल और सटीक होता जा रहा है।ऐसी मोटरों का उपयोग दुनिया में हर जगह किया जाता है, ऐसे तंत्रों द्वारा किए जाने वाले कार्यों की विविधता हर दिन बढ़ रही है, और उनकी आवश्यकता कम नहीं हो रही है।
संबंधित आलेख: