Eelarvevõimalus elektrivoolu põhiparameetrite teisendamiseks on pingejagurid. Sellist seadet on lihtne ise valmistada, kuid selleks peate teadma eesmärki, rakendusjuhtumeid, tööpõhimõtet ja arvutuste näiteid.
Sisu
Nimetamine ja rakendamine
Vahelduvpinge muundamiseks kasutatakse trafot, et voolutugevus oleks piisavalt kõrge. Kui vooluringile tuleb lisada väikese vooluga (kuni sadu mA) koormus, ei ole trafo pinge (U) muundur soovitatav.
Nendel juhtudel võite kasutada lihtsat pingejagurit (DN), mille maksumus on oluliselt madalam. Pärast vajaliku väärtuse saamist U alaldatakse ja tarbijale antakse toide. Vajadusel tuleks voolu (I) suurendamiseks kasutada väljundvõimsuse suurendamise etappi. Lisaks on olemas ka pidevad U-jaoturid, kuid neid mudeleid kasutatakse harvemini kui teisi.
DN-e kasutatakse sageli erinevate seadmete laadimiseks, mille puhul on vaja 220 V-st saada erinevat tüüpi akude jaoks madalamaid U väärtusi ja voolusid.Lisaks on mõistlik kasutada U jagamise seadmeid nii elektriliste mõõteriistade, arvutiseadmete kui ka laboriimpulsside ja tavaliste toiteallikate loomiseks.
Toimimispõhimõte
Pingejagur (DN) on seade, milles väljundi ja sisendi U vaheline suhe on ülekandeteguri kaudu. Ülekandekoefitsient on U väärtuste suhe jagaja väljundis ja sisendis. Pingejaguri vooluahel on lihtne ja on kahe järjestikku ühendatud tarbija kett - raadioelemendid (takistid, kondensaatorid või induktiivpoolid). Neil on erinevad väljundomadused.
Vahelduvvoolul on järgmised põhisuurused: pinge, voolutugevus, takistus, induktiivsus (L) ja mahtuvus (C). Valemid elektrienergia põhiväärtuste (U, I, R, C, L) arvutamiseks, kui tarbijad on jadamisi ühendatud:
- Resistentsuse väärtused liidetakse;
- Lisanduvad pinged;
- Voolu voolutugevus arvutatakse vooluahela sektsiooni Ohmi seaduse järgi: I = U / R;
- Induktiivsused lisatakse;
- Kogu kondensaatorite ahela mahtuvus: C = (C1 * C2 * ... * Cn) / (C1 + C2 + ... + Cn).
Lihtsa takisti DN valmistamiseks kasutatakse järjestikku ühendatud takistite põhimõtet. Tinglikult saab ringraja jagada 2 õlaks. Esimene õlg on ülemine ja asub DN sisendi ja nullpunkti vahel ning teine õlg on alumine, millest võetakse väljund U.
Nende õlgade U summa on võrdne sisendi U resultatiivse väärtusega. DN-id on lineaarset ja mittelineaarset tüüpi. Lineaarsed seadmed on need, mille väljund on U, mis varieerub lineaarselt vastavalt sisendväärtusele. Neid kasutatakse soovitud U määramiseks ahelate erinevates osades. Funktsionaalsetes potentsiomeetrites kasutatakse mittelineaarseid. Nende takistus võib olla aktiivne, reaktiivne ja mahtuvuslik.
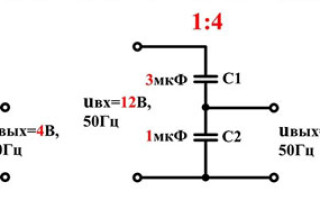
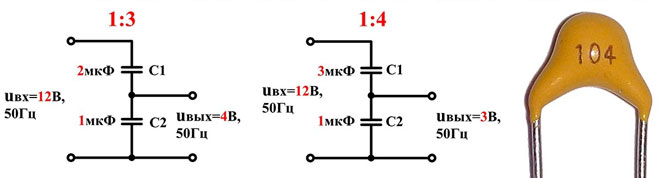
Lisaks võib DN olla ka mahtuvuslik. See kasutab 2 kondensaatori ketti, mis on ühendatud järjestikku.
Selle tööpõhimõte põhineb muutuva komponendiga ahela kondensaatorite takistuse reaktiivkomponendil. Kondensaatoril pole mitte ainult mahtuvuslikke omadusi, vaid ka takistust Xc. Seda takistust nimetatakse mahtuvuslikuks takistuseks, see sõltub voolu sagedusest ja määratakse järgmise valemiga: Xc = (1 / C) * w = w / C, kus w on tsükliline sagedus, C on kondensaatori väärtus.
Tsükliline sagedus arvutatakse valemiga: w = 2 * PI * f, kus PI = 3,1416 ja f on vahelduvvoolu sagedus.
Kondensaator ehk mahtuvuslik tüüp võimaldab suhteliselt suuremaid voolusid kui takistusseadmetest. Seda kasutatakse laialdaselt kõrgepingeahelates, kus U-väärtust tuleb mitu korda vähendada. Lisaks on sellel oluline eelis, et see ei kuumene üle.
DN-i induktiivne tüüp põhineb muutuva komponendiga ahelates elektromagnetilise induktsiooni põhimõttel. Vool liigub läbi solenoidi, mille takistus sõltub L-st ja mida nimetatakse induktiivseks. Selle väärtus on otseselt võrdeline vahelduvvoolu sagedusega: Xl = w * L, kus L on ahela või mähise induktiivsuse väärtus.
Induktiivne DN töötab ainult vooluahelates, millel on muutuv komponent ja induktiivne takistus (Xl).
Eelised ja miinused
Takistusliku DN-i peamised puudused on see, et seda ei saa kasutada kõrgsageduslikes ahelates, takistite oluline pingelangus ja võimsuse vähenemine. Mõnes vooluringis on vaja valida takistite võimsus, kuna seal on märkimisväärne küte.
Enamasti kasutatakse vahelduvvooluahelates aktiivse koormuse (takistuslikku) DN-i, kuid kompensatsioonikondensaatoritega, mis on ühendatud paralleelselt iga takistiga. Selline lähenemine vähendab kütmist, kuid ei eemalda peamist puudust, milleks on võimsuse kaotus. Eeliseks on kasutamine alalisvooluahelates.
Takistava DN-i võimsuskadude kõrvaldamiseks tuleks aktiivsed elemendid (takistid) asendada mahtuvuslike elementidega. Mahtuvuslikul elemendil on takistusliku DN-i suhtes mitmeid eeliseid:
- Seda kasutatakse vahelduvvooluahelates;
- Ülekuumenemist ei esine;
- Toitekadu väheneb, kuna erinevalt takistist pole kondensaatoril võimsust;
- Saab kasutada kõrgepinge toiteallikates;
- Kõrge efektiivsus (jõudluskoefitsient);
- Madalam I-kaotus.
Puuduseks on see, et seda ei saa kasutada konstantse U-ga ahelates. See on tingitud asjaolust, et alalisvooluahelate kondensaatoril ei ole mahtuvust, vaid see toimib ainult kondensaatorina.
Induktiivsel DN-l vahelduvvooluahelates on ka mitmeid eeliseid, kuid seda saab kasutada ka konstantsetes U-ahelates. Induktiivpoolil on takistus, kuid induktiivsuse tõttu see valik ei sobi, kuna U on oluliselt langenud. Peamised eelised takistusliku DN-i tüübi ees:
- Rakendus võrkudes muutujaga U;
- Komponentide kuumutamine on tühine;
- Väiksem voolukadu vahelduvvooluahelates;
- suhteliselt kõrge kasutegur (suurem kui mahtuvuslik);
- Kasutamine ülitäpsetes mõõteseadmetes;
- Madalam ebatäpsus;
- Jagaja väljundiga ühendatud koormus ei mõjuta jaotussuhet;
- Voolukaod on väiksemad kui mahtuvuslikud jagurid.
Puudused on järgmised:
- Konstantse U kasutamine toitevõrkudes põhjustab olulisi voolukadusid. Lisaks langeb pinge järsult elektrienergia tarbimise tõttu induktiivsuse jaoks.
- Väljundsignaal sageduskarakteristikute lõikes (ilma alaldi silda ja filtrit kasutamata) varieerub.
- Ei ole kohaldatav kõrgepinge vahelduvvooluahelates.
Takistite, kondensaatorite ja induktiivpoolidega pingejaguri arvutamine
Pärast arvutamiseks kasutatava pingejaguri tüübi valimist peate kasutama valemeid. Valed arvutused võivad seadme enda, vooluvõimenduse väljundastme ja tarbija läbi põletada.Valede arvutuste tagajärjed võivad olla hullemad kui raadiokomponentide rike: tulekahju lühise tagajärjel, samuti elektrilöök.
Ahela arvutamisel ja kokkupanemisel peate selgelt järgima ohutusreegleid, kontrollima enne seadme sisselülitamist selle õiget kokkupanekut ja mitte katsetama seda niiskes ruumis (suureneb elektrilöögi võimalus). Arvutustes kasutatav põhiseadus on vooluringi sektsiooni Ohmi seadus. Selle sõnastus on järgmine: vool on otseselt proportsionaalne vooluahela sektsiooni pingega ja pöördvõrdeline selle sektsiooni takistusega. Valemi kujul olev kirje on järgmine: I = U / R.
Takistitega pingejaguri arvutamise algoritm:
- Kogupinge: Upit = U1 + U2, kus U1 ja U2 on iga takisti U väärtused.
- Pinged takistitel: U1 = I * R1 ja U2 = I * R2.
- Upit = I * (R1 + R2).
- Koormuseta vool: I = U / (R1 + R2).
- U-langus igal takistil: U1 = (R1 / (R1 + R2)) * Upit ja U2 = (R2 / (R1 + R2)) * Upit.
R1 ja R2 väärtused peavad olema 2 korda väiksemad kui koormustakistus.
Kondensaatorite pingejaguri arvutamiseks võite kasutada valemeid: U1 = (C1 / (C1 + C2)) * Upit ja U2 = (C2 / (C1 + C2)) * Upit.
Sarnased valemid DN arvutamiseks induktiivsustel: U1 = (L1 / (L1 + L2)) * Upit ja U2 = (L2 / (L1 + L2)) * Upit.
Jagajaid kasutatakse enamasti koos dioodsilla ja stabilitroniga. Stabilitroon on pooljuhtseade, mis toimib U-stabilisaatorina. Dioodid tuleks valida vastupidise U-ga, mis on selles vooluringis lubatud U-st kõrgemal. Stabilitroon tuleks valida stabiliseerimispinge nõutava väärtuse teatmeteose järgi. Lisaks tuleks enne seda vooluringi lisada takisti, sest ilma selleta põleb pooljuhtseade läbi.
Seotud artiklid: