Un regulador diferencial proporcional-integral es un dispositivo que se instala en los sistemas automatizados para mantener un parámetro determinado capaz de cambiar.
Es confuso a primera vista, pero también es posible explicar el control PID para dummies, es decir personas que no están muy familiarizadas con los sistemas y aparatos electrónicos.
Contenido
¿Qué es un regulador PID?
Un regulador PID es un dispositivo integrado en el circuito de control con retroalimentación obligatoria. Está diseñado para mantener los niveles de consigna, por ejemplo, la temperatura del aire.
El dispositivo proporciona una señal de control o de salida al controlador, basada en los datos recibidos de los sensores o transmisores. Los controladores tienen una alta precisión transitoria y calidad de funcionamiento.
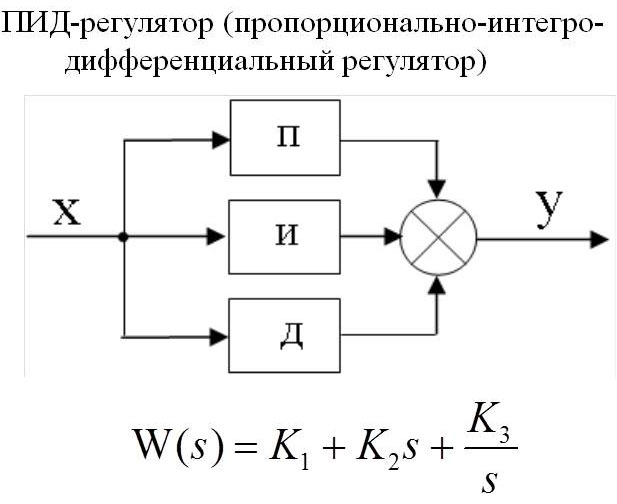
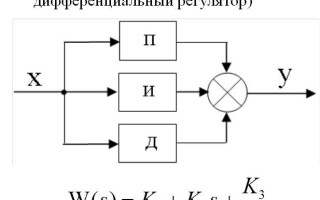
Tres coeficientes del controlador PID y principio de funcionamiento
La función del regulador PID es proporcionar una señal de salida de la potencia necesaria para mantener el parámetro controlado en un nivel predeterminado. Para calcular el valor, se utiliza una fórmula matemática compleja que incluye 3 coeficientes: proporcional, integral y diferencial.
Tomemos como objeto de control un depósito con agua, en el que es necesario mantener la temperatura a un nivel determinado regulando el grado de apertura de una válvula de vapor.
El componente proporcional aparece en el momento de la falta de correspondencia con los datos de entrada. En términos sencillos es así: se toma la diferencia entre la temperatura real y la deseada, se multiplica por un coeficiente ajustable y se obtiene la señal de salida que se aplicará a la válvula. En otras palabras, en cuanto la temperatura ha bajado, se inicia el proceso de calentamiento; en cuanto ha subido por encima de la temperatura deseada, se apaga o incluso se enfría.
A continuación viene el componente integral, que está diseñado para compensar los efectos del entorno u otras influencias perturbadoras para mantener nuestra temperatura en el punto de consigna. Como siempre hay factores adicionales que afectan a los dispositivos que se controlan, la cifra ya está cambiando cuando llegan los datos para calcular el componente proporcional. Y cuanto mayores sean las influencias externas, mayores serán las fluctuaciones de la cifra. Se producen saltos en la entrega de potencia.
El componente integral intenta devolver el valor de la temperatura basándose en los valores anteriores si la temperatura ha cambiado. El proceso se describe con más detalle en el siguiente vídeo.
A continuación, la señal de salida del regulador se alimenta en función del coeficiente para subir o bajar la temperatura. Con el tiempo, se selecciona un valor que compensa los factores externos, y las sobrecargas desaparecen.
La integral se utiliza para eliminar errores calculando el error estático. Lo principal en este proceso es seleccionar el coeficiente correcto, de lo contrario el error (desajuste) también afectará a la componente integral.
El tercer componente del PID es el componente diferencial. Está diseñado para compensar los efectos de los retrasos que se producen entre el impacto en el sistema y la retroalimentación. El regulador proporcional suministra energía hasta que la temperatura alcanza el valor correcto, pero siempre hay errores al pasar la información al dispositivo, especialmente con valores grandes. Esto puede provocar un sobrecalentamiento. El diferencial anticipa las desviaciones causadas por los retrasos o las influencias ambientales y reduce la potencia suministrada por adelantado.
Configuración de un regulador PID
El controlador PID se sintoniza utilizando 2 métodos:
- La síntesis consiste en calcular los parámetros a partir del modelo del sistema. Esta sintonía es precisa, pero requiere un conocimiento profundo de la teoría del control automático. Sólo pueden hacerlo los ingenieros y los científicos. Ya que es necesario tomar las características del flujo y hacer muchos cálculos.
- El método manual se basa en la prueba y el error. Para ello, se toman los datos de un sistema ya existente y se realizan algunos ajustes en uno o varios coeficientes del regulador. Tras el encendido y la observación del resultado final, los parámetros se modifican en la dirección deseada. Y así sucesivamente, hasta alcanzar el nivel de rendimiento deseado.
El análisis teórico y los métodos de sintonización rara vez se utilizan en la práctica, debido al desconocimiento de las características del objeto de control y a una multitud de posibles influencias perturbadoras. Los métodos experimentales basados en la observación del sistema son más comunes.
Los procesos automatizados modernos se implementan como módulos especializados bajo el control de un software para ajustar los coeficientes de regulación.
Propósito del controlador PID
El controlador PID está diseñado para mantener un determinado valor -temperatura, presión, nivel del tanque, flujo en una tubería, concentración de algo, etc.- en un nivel requerido cambiando la acción de control en los actuadores, como las válvulas de control automático, utilizando valores proporcionales, integradores, diferenciadores para su ajuste.
El objetivo de la aplicación es obtener una señal de control precisa, capaz de controlar grandes plantas e incluso reactores de centrales eléctricas.
Ejemplo de circuito de control de temperatura
Los controladores PID se utilizan a menudo en el control de la temperatura, tomemos el simple ejemplo de calentar agua en un tanque como ejemplo de este proceso automático.
El depósito se llena de líquido que debe calentarse a la temperatura deseada y mantenerse al nivel deseado. Hay un sensor de temperatura en el interior del tanque - un termopar termopar o termómetro de resistencia y se conecta directamente al regulador PID.
Suministraremos vapor para calentar el líquido, como se muestra en la ilustración siguiente, con la válvula de control automática. La propia válvula recibe una señal del controlador. El operador introduce en el regulador PID el valor de consigna de temperatura que debe mantenerse en el depósito.

Si los coeficientes del regulador son incorrectos, la temperatura del agua saltará y la válvula se abrirá y cerrará por completo. En este caso, hay que calcular los coeficientes PID y volver a introducirlos. Si se hace correctamente, después de un corto período de tiempo el sistema se igualará y la temperatura en el tanque se mantendrá en la temperatura establecida, con el grado de apertura de la válvula de control en la posición media.
Artículos relacionados: