Un sensore in termini generali è un dispositivo che converte una quantità fisica in un'altra che può essere elaborata, trasmessa o convertita. Il primo è di solito una grandezza fisica che non può essere misurata direttamente (temperatura, velocità, spostamento, ecc.), mentre il secondo è un segnale elettrico o ottico. I sensori, il cui elemento di base è la bobina d'induttanza, occupano una propria nicchia nel campo degli strumenti di misura.
Informazioni su
Come sono progettati i sensori induttivi e come funzionano
I sensori induttivi per il loro principio di funzionamento sono attivi, cioè richiedono un oscillatore esterno. Questo genera un segnale con una frequenza e un'ampiezza definite nella bobina dell'induttore.
La corrente che scorre attraverso le bobine crea un campo magnetico. Se un oggetto conduttivo entra nel campo magnetico, i parametri della bobina cambiano. Non resta che rilevare questo cambiamento.
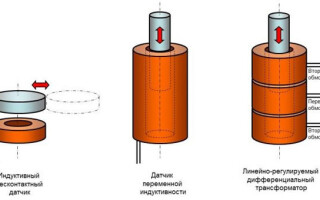
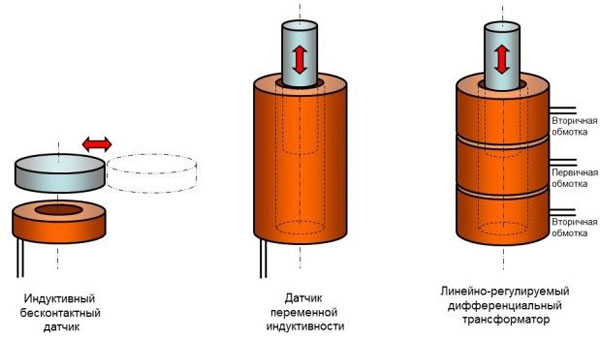
I semplici sensori senza contatto rispondono alla presenza di oggetti metallici nel campo vicino della bobina. Questo cambia l'impedenza della bobina, questo cambiamento deve essere convertito in un segnale elettrico, amplificato e/o rilevato da un circuito di confronto.
Un altro tipo di sensore risponde ai cambiamenti nella posizione longitudinale di un oggetto che funge da nucleo della bobina. Quando la posizione dell'oggetto cambia, scivola dentro o fuori la bobina, cambiando così la sua induttanza. Questo cambiamento può essere convertito in un segnale elettrico e misurato. Un'altra versione di questo sensore è quella in cui un oggetto viene spinto sulla bobina dall'esterno. Questo provoca una riduzione dell'induttanza dovuta all'effetto di schermatura.
Un'altra versione del sensore di spostamento induttivo è il trasformatore differenziale variabile lineare (LVDT). È una bobina composta fatta nel seguente ordine:
- bobina secondaria 1;
- avvolgimento primario;
- avvolgimento secondario 2.
Il segnale del generatore è applicato all'avvolgimento primario. Il campo magnetico creato dalla bobina centrale induce un EMF in ciascuna delle bobine secondarie (principio del trasformatore).principio del trasformatore). Il nucleo, muovendosi, cambia l'accoppiamento reciproco tra le bobine, cambiando la forza elettromotrice in ciascuno degli avvolgimenti. Questo cambiamento può essere rilevato dal circuito di misurazione. Poiché la lunghezza del nucleo è inferiore alla lunghezza totale della bobina composita, il rapporto dei campi elettromagnetici negli avvolgimenti secondari può determinare senza ambiguità la posizione dell'oggetto.
Un encoder rotativo si basa sullo stesso principio di modifica dell'accoppiamento induttivo tra gli avvolgimenti. Consiste in due bobine coassiali. Il segnale è applicato a uno degli avvolgimenti, il CEM nel secondo avvolgimento dipende dall'angolo di rotazione reciproca.
È ovvio dal principio di funzionamento che i sensori induttivi, indipendentemente dal loro design, sono sensori senza contatto. Funzionano a distanza e non richiedono un contatto diretto con l'oggetto da monitorare.
Vantaggi e svantaggi dei sensori induttivi
I vantaggi dei sensori induttivi sono principalmente
- Costruzione robusta;
- nessuna connessione di contatto;
- alta potenza di uscita, che riduce l'influenza del rumore e semplifica il circuito di controllo;
- alta sensibilità;
- Possibilità di funzionamento con alimentazione AC di frequenza industriale.
I principali svantaggi dei sensori induttivi sono le loro dimensioni, il peso e la complessità. Sono necessarie attrezzature speciali per avvolgere le bobine con i parametri richiesti. Un altro svantaggio è che l'ampiezza del segnale dell'oscillatore master deve essere mantenuta con precisione. La gamma di sensibilità cambia anche al variare dell'ampiezza del segnale. Poiché i sensori funzionano solo in corrente alternata, mantenere l'ampiezza diventa un problema tecnico definitivo. Non è possibile collegare il sensore direttamente (o tramite un trasformatore riduttore) a una rete domestica o industriale, dove le variazioni di tensione in ampiezza o frequenza possono essere fino al 10%, anche in funzionamento normale, rendendo inaccettabile la precisione della misurazione.
La precisione della misurazione può essere influenzata anche da:
- Campi magnetici esterni (la schermatura del sensore non è possibile in base al suo principio di funzionamento);
- induzioni EMF laterali nei cavi di alimentazione e di misura
- imprecisioni di fabbricazione;
- Errori nella caratteristica del sensore;
- Controflessioni o deformazioni nel punto di montaggio della sonda che non influiscono sulle prestazioni generali;
- Dipendenza della precisione dalla temperatura (i parametri del filo di avvolgimento, compresa la sua resistenza, cambiano).
L'incapacità dei sensori di induttanza di rispondere alla presenza di oggetti dielettrici nel loro campo magnetico può essere considerata sia un vantaggio che uno svantaggio. Da un lato, questo limita il campo di applicazione. D'altra parte li rende insensibili allo sporco, al grasso, alla sabbia ecc. sugli oggetti monitorati.
Attraverso la comprensione dei limiti e delle possibili limitazioni dei sensori induttivi, i vantaggi dei sensori induttivi possono essere sfruttati razionalmente.
Campi di applicazione per i sensori induttivi
Gli interruttori di prossimità induttivi sono spesso utilizzati come interruttori di fine corsa. Questi dispositivi sono utilizzati per una grande varietà di applicazioni:
- nei sistemi di sicurezza come sensori per l'apertura non autorizzata di porte e finestre;
- nei sistemi di telecontrollo come sensori di posizione limite per assemblaggi e meccanismi;
- nella vita quotidiana nei circuiti di indicazione della posizione chiusa di porte, ante;
- per il conteggio di oggetti (ad esempio in movimento su un nastro trasportatore);
- per determinare la velocità di rotazione degli ingranaggi (ogni dente che passa dal sensore genera un impulso);
- In altre situazioni.

Gli encoder di posizione angolare possono essere utilizzati per determinare gli angoli di rotazione di alberi, ingranaggi e altre unità rotanti, e anche come encoder assoluti. Possono anche essere utilizzati nelle macchine utensili e nelle applicazioni di robotica insieme agli encoder lineari. Ovunque sia necessario conoscere la posizione esatta dei componenti della macchina.
Applicazioni pratiche per i sensori induttivi
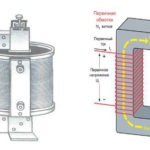
In pratica, i progetti di sensori induttivi possono essere implementati in una varietà di modi. Il design e l'uso più semplice è con un sensore singolo a due fili che controlla la presenza di oggetti metallici all'interno del suo campo di rilevamento. Questi dispositivi sono spesso realizzati sulla base di un nucleo a forma di W, ma questo non è un punto cruciale. Questo design è più facile da produrre.
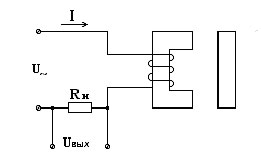
Quando la resistenza della bobina cambia, la corrente nel circuito e la caduta di tensione attraverso il carico cambiano. Questi cambiamenti possono essere rilevati. Il problema è che la resistenza di carico diventa critica. Se è troppo grande, il cambiamento di corrente quando appare un oggetto metallico sarà relativamente piccolo. Questo riduce la sensibilità e l'immunità del sistema. Se è piccolo, la corrente nel circuito sarà alta e sarà necessario un sensore più resistente.
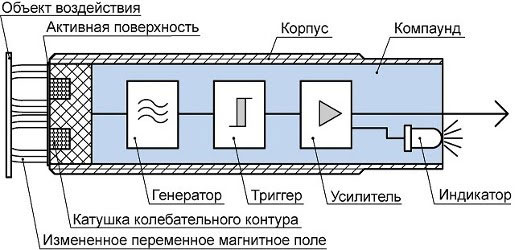
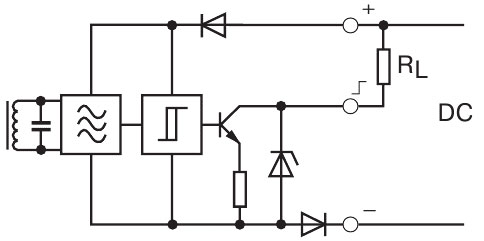
Per questo motivo, ci sono progetti in cui il circuito di rilevamento è incorporato nell'alloggiamento del sensore. Un generatore genera degli impulsi che alimentano la bobina dell'induttore. Quando un certo livello viene raggiunto, viene azionato un trigger, passando dallo stato 0 a 1 o viceversa. Un amplificatore buffer amplifica il segnale in termini di potenza e/o tensione, illumina (spegne) il LED ed emette un segnale discreto per il circuito esterno.
Il segnale di uscita può essere generato:
- per mezzo di un sistema elettromagnetico o relè a stato solido - livello di tensione nullo o unitario;
- "contatto secco" relè elettromagnetico;
- collettore aperto transistor (strutture n-p-n o p-n-p).
In questo caso sono necessari tre fili per collegare il sensore:
- alimentazione;
- filo comune (0 volt);
- filo di segnale.
Tali sensori possono anche essere alimentati da una tensione continua. I loro impulsi di induttanza sono generati da un oscillatore interno.
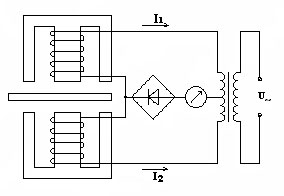
I sensori differenziali sono utilizzati per il monitoraggio della posizione. Se l'oggetto da monitorare è simmetrico rispetto a entrambe le bobine, la corrente attraverso entrambe le bobine è la stessa. Se una delle due bobine è orientata verso il campo, si verifica uno squilibrio, la corrente totale non è più zero, che può essere rilevato da un indicatore con una freccia al centro della scala. L'indicatore può essere usato per determinare sia l'ampiezza dell'offset che la sua direzione. Un circuito di controllo può essere usato al posto di un comparatore per fornire un segnale quando si ricevono informazioni su un cambiamento di posizione, agire per allineare l'oggetto, fare correzioni di processo, ecc.

I sensori basati sul principio dei trasformatori differenziali a regolazione lineare sono fabbricati come costruzioni complete, costituite da un telaio con avvolgimenti primari e secondari e un'asta che si muove all'interno (può essere caricata a molla). I fili per il segnale del generatore e l'EMF degli avvolgimenti secondari sono collegati all'esterno. L'oggetto da controllare può essere collegato meccanicamente allo stelo. Può anche essere fatto di materiale dielettrico - solo la posizione dello stelo è rilevante per la misurazione.
Nonostante alcuni svantaggi intrinseci, il sensore induttivo chiude molte aree relative al rilevamento senza contatto di oggetti nello spazio. Nonostante il costante sviluppo della tecnologia, questo tipo di dispositivo non lascerà il mercato dei dispositivi di misurazione nel prossimo futuro, perché la sua azione si basa sulle leggi fondamentali della fisica.
Articoli correlati: