Sensor dalam pengertian umum adalah perangkat yang mengubah satu kuantitas fisik menjadi kuantitas fisik lain yang sesuai untuk pemrosesan, transmisi, atau konversi berikutnya. Sebagai aturan, yang pertama adalah kuantitas fisik yang tidak dapat diukur secara langsung (suhu, kecepatan, perpindahan, dll.), dan yang kedua adalah sinyal listrik atau optik. Sensor, yang elemen dasarnya adalah kumparan, menempati ceruknya sendiri di bidang alat ukur.
Isi
Bagaimana sensor induktif dirancang dan cara kerjanya
Sensor induktif adalah sensor aktif berdasarkan prinsip operasinya, yaitu memerlukan osilator eksternal. Ini memasok kumparan induktor dengan sinyal frekuensi dan amplitudo yang telah ditentukan.
Arus yang mengalir melalui kumparan menciptakan medan magnet. Jika benda konduktif memasuki medan magnet, parameter kumparan berubah. Yang tersisa hanyalah mendeteksi perubahan ini.
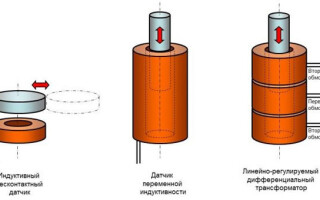
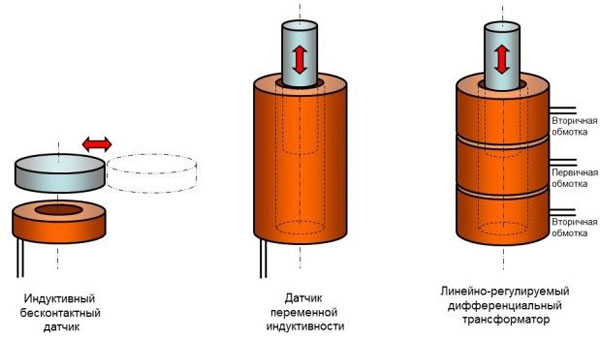
Sensor non-kontak sederhana bereaksi terhadap penampilan benda logam di zona dekat koil. Ini mengubah impedansi koil, perubahan ini harus diubah menjadi sinyal listrik, diperkuat dan (atau) memperbaiki bagian ambang dengan bantuan rangkaian perbandingan.
Sensor jenis lain merespons perubahan posisi longitudinal objek, yang berfungsi sebagai inti kumparan. Saat posisi objek berubah, objek meluncur masuk atau keluar dari kumparan, sehingga mengubah induktansinya. Perubahan ini dapat diubah menjadi sinyal listrik dan diukur. Versi lain dari sensor ini adalah ketika objek didorong ke kumparan dari luar. Hal ini menyebabkan pengurangan induktansi karena efek layar.
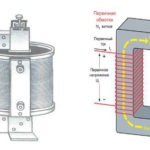
Varian lain dari sensor perpindahan induktif adalah Linear Variable Differential Transformer (LVDT). Ini adalah koil majemuk yang dibuat dengan urutan sebagai berikut:
- gulungan sekunder 1;
- gulungan primer;
- gulungan sekunder 2.
Sinyal dari generator diterapkan ke belitan primer. Medan magnet yang dihasilkan oleh kumparan tengah menginduksi EMF di masing-masing sekunder (prinsip transformator). Inti, saat bergerak, mengubah kopling timbal balik antara kumparan, mengubah gaya gerak listrik di masing-masing belitan. Perubahan ini dapat dideteksi oleh rangkaian pengukuran. Karena panjang inti lebih kecil dari panjang total kumparan kompon, rasio EMF pada belitan sekunder dapat dengan jelas menentukan posisi objek.
Prinsip yang sama - mengubah kopling induktif antara belitan - digunakan untuk membangun sensor rotasi. Ini terdiri dari dua kumparan koaksial. Sinyal diterapkan ke salah satu belitan, EMF pada belitan kedua tergantung pada sudut rotasi bersama.
Jelas dari prinsip operasi bahwa sensor induktif, terlepas dari desainnya, adalah sensor non-kontak. Mereka beroperasi pada jarak dan tidak memerlukan kontak langsung dengan objek yang akan dipantau.
Keuntungan dan kerugian dari sensor induktif
Keuntungan dari sensor induktif terutama meliputi:
- keandalan desain;
- Tidak adanya koneksi kontak;
- daya keluaran tinggi, yang mengurangi pengaruh kebisingan dan menyederhanakan sirkuit kontrol;
- sensitivitas tinggi;
- Kemungkinan operasi dari sumber tegangan AC frekuensi industri.
Kerugian utama dari sensor induktif adalah ukuran, berat, dan kerumitan pembuatannya. Untuk penggulungan kumparan dengan parameter tertentu, peralatan khusus diperlukan. Kerugian lain adalah kebutuhan untuk secara akurat menjaga amplitudo sinyal dari osilator master. Ketika berubah, rentang sensitivitas juga berubah. Karena sensor bekerja hanya dengan arus bolak-balik, menjaga amplitudo menjadi masalah teknis yang pasti. Langsung (atau melalui transformator step-down) di jaringan domestik atau industri tidak mungkin untuk menghubungkan sensor - di dalamnya fluktuasi tegangan dalam amplitudo atau frekuensi bahkan dalam mode normal dapat mencapai 10%, yang membuat akurasi pengukuran tidak dapat diterima.
Juga akurasi pengukuran dapat dipengaruhi oleh:
- medan magnet asing (melindungi sensor tidak dimungkinkan berdasarkan prinsip operasinya);
- Induksi EMF eksternal pada kabel suplai dan pengukuran;
- kesalahan manufaktur;
- Ketidakakuratan karakteristik sensor;
- Serangan balik atau deformasi di lokasi pemasangan sensor, yang tidak memengaruhi kinerja umum;
- ketergantungan akurasi pada suhu (perubahan parameter kawat berliku, termasuk resistansi).
Ketidakmampuan sensor induktansi untuk merespon penampilan objek dielektrik dalam medan magnetnya dapat diklasifikasikan sebagai keuntungan dan kerugian. Di satu sisi, ini membatasi ruang lingkup aplikasi mereka. Di sisi lain, itu membuat mereka tidak sensitif terhadap keberadaan kotoran, minyak, pasir, dll pada objek yang dipantau.
Pengetahuan tentang kerugian dan kemungkinan keterbatasan sensor induktif memungkinkan penggunaan keuntungannya secara rasional.
Bidang aplikasi untuk sensor induktif
Sensor proximity induktif sering digunakan sebagai limit switch. Perangkat ini telah menjadi umum:
- dalam sistem keamanan, sebagai sensor pembukaan jendela dan pintu yang tidak sah;
- dalam sistem telemekanik, sebagai sensor posisi akhir unit dan mekanisme;
- dalam kehidupan sehari-hari dalam skema indikasi posisi tertutup pintu, ikat pinggang;
- untuk menghitung objek (misalnya bergerak di atas ban berjalan);
- untuk menentukan kecepatan putaran roda gigi (setiap gigi yang melewati sensor menghasilkan pulsa);
- Dalam situasi lain.

Encoder posisi sudut dapat digunakan untuk menentukan sudut rotasi poros, roda gigi, dan unit berputar lainnya, dan juga sebagai enkoder absolut. Mereka juga dapat digunakan dalam peralatan mesin dan aplikasi robotika bersama dengan encoder linier. Dimanapun posisi komponen mesin perlu diketahui secara tepat.
Contoh implementasi praktis untuk sensor induktif
Dalam praktiknya, desain sensor induktif dapat diimplementasikan dalam berbagai cara. Desain dan penggabungan paling sederhana adalah sensor tunggal dua kawat, yang memantau keberadaan benda logam di area penginderaannya. Perangkat semacam itu sering dibuat berdasarkan inti berbentuk W, tetapi ini adalah poin yang tidak berprinsip. Desain seperti itu lebih mudah dibuat.
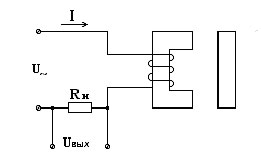
Ketika Anda mengubah resistansi kumparan, arus dalam rangkaian dan penurunan tegangan pada beban berubah. Perubahan ini dapat dideteksi. Masalahnya adalah bahwa resistensi beban menjadi kritis. Jika terlalu besar, perubahan arus ketika benda logam muncul akan relatif kecil. Ini mengurangi sensitivitas dan kekebalan sistem. Jika kecil, arus di sirkuit akan tinggi, dan sensor yang lebih tangguh akan diperlukan.
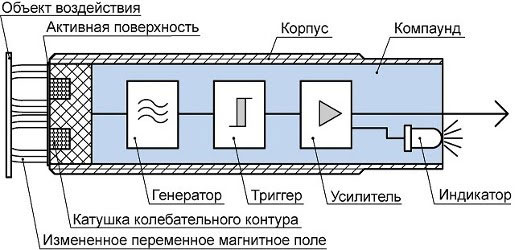
Oleh karena itu, ada desain dengan sirkuit pengukuran yang dibangun ke dalam rumah sensor. Generator menghasilkan pulsa yang memberi makan kumparan induktor. Ketika level tertentu tercapai, pemicu diaktifkan, membalik dari 0 ke 1 atau sebaliknya.Penguat penyangga menguatkan sinyal dengan daya dan/atau tegangan, menerangi (memadamkan) LED dan mengeluarkan sinyal diskrit ke sirkuit eksternal.
Sinyal keluaran dapat dihasilkan:
- melalui gelombang elektromagnetik atau relai keadaan padat - tingkat tegangan nol atau satuan;
- "kontak kering" relai elektromagnetik;
- kolektor terbuka transistor (struktur n-p-n atau p-n-p).
Dalam hal ini, Anda memerlukan tiga kabel untuk menghubungkan sensor:
- kekuasaan;
- kabel biasa (0 volt);
- kabel sinyal.
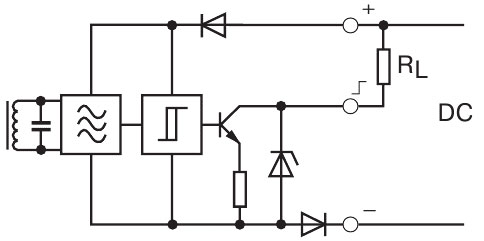
Sensor tersebut juga dapat didukung oleh tegangan DC. Pulsa induktansi mereka dihasilkan oleh osilator internal.
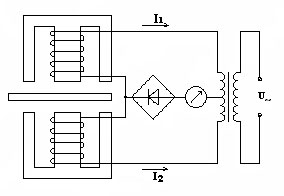
Sensor diferensial digunakan untuk pemantauan posisi. Jika objek yang akan dimonitor secara simetris terhadap kedua kumparan, arus yang melaluinya adalah sama. Jika salah satu kumparan digeser ke arah medan, terjadi ketidakseimbangan, arus total berhenti sama dengan nol, yang dapat dideteksi oleh indikator dengan panah di tengah skala. Indikator dapat digunakan untuk menentukan jumlah perpindahan dan arahnya. Alih-alih perangkat panah, dimungkinkan untuk menggunakan sirkuit kontrol, yang, ketika menerima informasi tentang perubahan posisi, akan memberikan sinyal, mengambil tindakan untuk menyelaraskan objek, melakukan penyesuaian pada proses teknologi, dll.

Sensor yang dibuat sesuai dengan prinsip transformator diferensial yang diatur linier diproduksi sebagai desain lengkap, mewakili kerangka dengan belitan primer dan sekunder dan batang yang bergerak di dalam (dapat dibebani pegas). Ada kabel untuk sinyal generator dan ekstraksi EMF dari gulungan sekunder. Objek yang akan dikendalikan dapat dihubungkan secara mekanis ke batang. Itu juga dapat dibuat dari dielektrik - hanya posisi batang yang penting untuk pengukuran.
Terlepas dari kelemahan tertentu yang melekat, sensor induktif menutup banyak area yang terkait dengan deteksi objek non-kontak di ruang angkasa. Terlepas dari perkembangan teknologi yang konstan, perangkat jenis ini tidak akan meninggalkan pasar alat pengukur di masa mendatang, karena tindakannya didasarkan pada hukum fisika dasar.
Artikel terkait: